






参考:视觉slam14讲
说明:在看高翔大大的视觉slam14讲欧拉角部分时,提到万向锁问题,当时第一遍没看懂,接着上网搜索了一下,发现大多都是以某个老外的视频讲解出发,内容比较多,再就是各种不怎么理解的图(本人急性子)遂重新看了书中欧拉角这部分,大体明白了一丢丢!
1.欧拉角
欧拉角提供了一种非常直观的方式来描述旋转——它使用了三个分离的转角,把一个旋转分解成三次绕不同轴的旋转。
我们以ZYX 定义旋转方式,且绕旋转之后的轴旋转,即先绕Z轴旋转,再绕Y轴旋转,最后绕X轴旋转。
ZYX转角相当于把任意旋转分解成以下三个轴上的转角:
1. 绕物体的 Z 轴旋转,得到偏航角 yaw;
2. 绕旋转之后的Y轴旋转,得到俯仰角 pitch;
3. 绕旋转之后的X轴旋转,得到滚转角 roll;
此时,我们可以使用 [r,p,y]T 这样一个三维的向量描述任意旋转。rpy 角的旋转顺序是ZYX。
2.缺点
万向锁问题
奇异性问题
欧拉角不适于插值和迭代
SLAM中不直接使用欧拉角表达姿态
滤波或优化中使用欧拉角表达旋转
3.万向锁问题
在俯仰角为 ±90◦ 时,第一次旋转与第三次旋转将使用同一个轴,使得系统丢失了一个自由度。
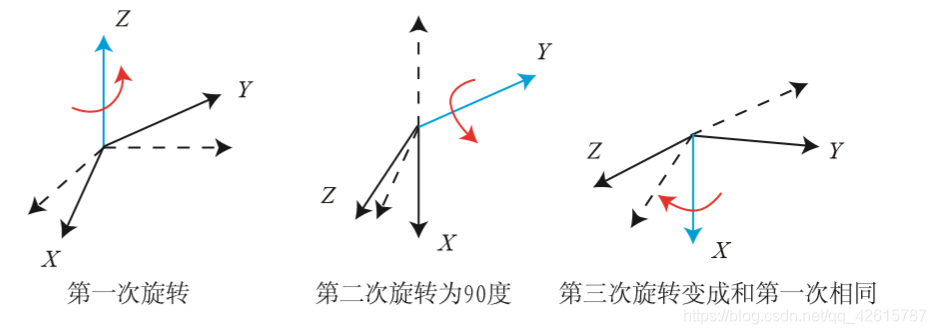
在原始坐标系下,依次经历了ZYX轴三次旋转。如何根据上图来理解万向锁呢?关键在上面的第一次旋转与第三次旋转将使用同一个轴这句话。
假设世界坐标系如下:
从旋转过程图中可以看出,第一次绕Z轴旋转和第三次绕X轴旋转,X轴和Z轴放到上图中的世界坐标系下,其实都在世界坐标系的Z轴所在的直线上。只是方向相反而已。那么在第三次绕X轴旋转时和第一次绕Z轴旋转不都可看成是在绕同一竖直线旋转吗?第三次旋转任何一个角度这件事而我第一次旋转就能做到。
注:
以上仅代表自己理解,有错望指正,谢谢!














 821
821











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









