







UWB测距定位方法
UWB的测距定位方法主要有三种:ToF、TDoA、AoA。
ToF
ToF(Time of Flight),即飞行时间测量,通过直接计算两点之间的发射波与接收波之间的时间间隔实现距离的测量。

图 1 ToF原理图
ToF有两种应用方式:发射与接收时间同步、发射与接收时间不同步。
- 发射与接收时间同步
即Time Synchronized Transmitter and Receiver,这种方式下,要求UWB标签Tag与基站之间进行时钟同步,工作过程为:Tag向周围的基站广播信息,由于所有基站与Tag之间时钟同步,故基站根据信息中的发送时间戳与自己的接收时间戳对比,即可确定数据飞行之间,从而判断基站与Tag之间的距离。
该方式的问题在于:难以实现系统中包括Tag和基站在内的所有设备进行时钟同步。所以,该种方式极少被采用。 - 发射与接收时间不同步
即Unsynchronized Transmitter and Receiver,这种方式下,Tag与基站之间无需进行时钟同步。
基本原理如下图所示,设备A向设备B发出脉冲,一段时间troundA后接收到设备B返回的脉冲,设飞行时间为tp,则粗略计算得:
2tp=troundA

图 2 TWR测距原理
但实际上,troundA还存在设备B的处理延时treplyB,而延时treplyB远远大于传输延时tp,故导致测量存在很大误差。而由于A、B两个设备的时钟不同步,直接使用B设备的treplyB会引入A、B两设备的时钟偏移,故不能直接使用treplyB。
可以使用SDS-TWR(Symmetric double-sided two-way ranging)的方法时间时钟偏移的消除。基本原理如下:
a) 设备A在时间点t1向设备B发出脉冲;
b) 设备B接收到脉冲后,经延时treplyB,在时间点t2从设备B发出回复脉冲;
c) 设备A在时间点t3接收到设备B发出的回复脉冲,t3-t1=troundA;
d) 设备A经延时treplyA再次向设备B发出脉冲;
e) 设备B在时间点t4接收到A发出的最终脉冲,t4-t2= troundB;

图 3 SDS-TER测量原理图
由此可以计算出:
a) 2tp=troundA-treplyB
b) 2tp=troundB-treplyA
即4tp=troundA- treplyB+ troundB-treplyA= (troundA-treplyA) +( troundB – treplyB)
由此可以消除A、B两个设备之间的时钟不同步以及时钟偏移。
TDoA
TDoA即Time Difference of Arrival,即通过到达时间的不同进行位置测量,原理图下图。
TDoA要求所有基站进行时钟同步,通过Tag想所有基站广播脉冲,每个基站在不同时刻接收到Tag发送的信息,通过基站接收信息的时间差,可以通过几何方法确定Tag的位置。该方法有以下几个特点:
a) 至少需要2个基站,基站的坐标需要明确;
b) 所有基站之间需进行同步,Tag无需与基站之间进行同步;
c) Tag只发送数据,不进行接收,比较节省功耗;
d) 基站之间需要严格同步,搭建成本高;

图 4 TDoA测量原理
AoA
即Angle of Arrival,通过基站检测Tag的角度实现定位,如下图。
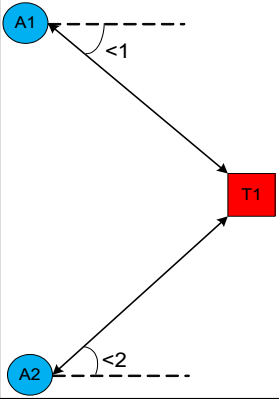
图 5 AoA测量原理
AoA的测量方式为:每个基站均存在天线阵列,通过基站中某个方向的天线接收到数据时可以确定Tag的方向,通过至少两个基站确定的Tag角度即可确定Tag位置。
该方法的特点为:
a) 至少2个基站,每个基站均具有天线阵列;
b) 检测的精度与天线阵列的个数和排列方式有关;
c) 该方案的成本与天线阵列中天线的个数强相关;
d) 不适用于多级转发的场景;
参考:
DecaWave——APS003 Application Note: Introduction to Real Time Location Systems.















 914
914











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









