









filter-lio模块
主要方案有FAST-LIO以及LINS。
LINS
该算法是直接在lego上面改的,主要针对的还是16线激光.
主要模块是:
- Feature Extraction Module: 点云分割以及特征提取, 和legoloam的操作一样
- LIO module: 融合IMU与激光的里程计.
- Mapping Module: 局部地图优化以及回环检测与后端优化, 和legoloam一样
该算法的核心还是IMU与激光融合的LIO模块, 重点看这部分就可以了.

LIO模块运行的基本逻辑是,原始激光点云首先进入image_projection_node.cpp中执行数据预处理,比如滤除地面,聚类滤波等操作,然后 将处理后的点云以及IMU数据传入lins_fusion_node.cpp 进一步执行特征提取、去畸变,以及计算里程计并融合。
1. 开始
首先理清LIO module相关的文件:
src/lins_fusion_node.cpp: LIO 节点, 构造了 fusion::LinsFusion 对象.
src/lib/Estimator.cpp: fusion::LinsFusion 类的实现, 该类相当于ROS接口, 将传感器数据通过ROS传入到算法内部中.
include/Estimator.h: fusion::LinsFusion 类的声明.
include/integrationBase.h: IMU 运动学模型相关.
include/KalmanFilter.hpp: 这里只是实现了使用IMU进行EKF状态预测的部分.
include/StateEstimator.hpp: LIO算法底层库的实现, 包含特征提取等.
重点在IMU的回调函数中,
流程:
- 将IMU数据与车体系对齐.
// 将IMU与车体坐标对齐
alignIMUtoVehicle(misalign_euler_angles_, acc_raw_, gyr_raw_, acc_aligned_,
gyr_aligned_);
- 将IMU数据添加到 imuBuf_ 中.
// Add a new IMU measurement
Imu imu(imuMsg->header.stamp.toSec(), acc_aligned_, gyr_aligned_);
imuBuf_.addMeas(imu, imuMsg->header.stamp.toSec()); // MapRingBuffer<Imu>
- 执行状态估计 performStateEstimation();
2. 融合的实现
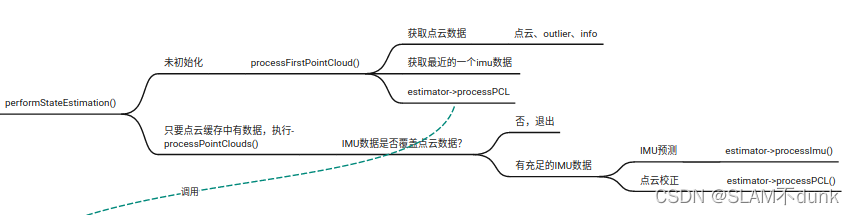
核心函数 - performStateEstimation(),融合就是在这个函数中完成的。
主要逻辑:该函数在IMU的回调函数中执行,执行时,每次都去检查最老的点云数据是否被IMU数据覆盖,如果覆盖,那么循环执行IMU的IKF预测过程,接着执行点云的IKF校正过程。
流程:
- 检查数据是否充分
if (imuBuf_.empty() || pclBuf_.empty() || cloudInfoBuf_.empty() ||
outlierBuf_.empty())
return;
- 检查是否进行初始化 ,没执行初始化 则执行 processFirstPointCloud();
- while()循环 , 反复执行 processPointClouds();
2.1 processFirstPointCloud()
如果初始化未完成,则进入这个函数进行处理.
流程:
-
获取最新的分割后的点云为 distortedPointCloud, 以及外点点云 outlierMsg, 当前点云信息 cloudInfoMsg , 以及最新的imu数据.
-
调用 下面函数完成处理
estimator->processPCL(scan_time_, imu, distortedPointCloud, cloudInfoMsg, outlierPointCloud);
2.2 processPointClouds()
初始化后,在这个函数中完成完整的LIO流程。
流程:
1、获取上一次估计后第一个点云数据
2、检查最后一个IMU的时间戳是否晚于该点云时间,如果比点云的时间早,认为IMU没有覆盖两帧点云直接退出。
3、对于当前帧时间戳之前的IMU数据,循环执行IMU预测过程,
estimator->processImu(dt, imu.acc, imu.gyr);
4、执行IESKF的观测更新:
// Update the iterative-ESKF using a new PCL
estimator->processPCL(scan_time_, imu, distortedPointCloud, cloudInfoMsg,
outlierPointCloud)
大概的流程就是这样了,可以看到最后数据都流向了StateEstimator类的processImu()和processPCL()两个函数中,下面学习这两个函数。
3. StateEstimator类
globalState_ 是当前机体坐标系(IMU系)相对于世界坐标系的状态。
filter_->state_ 即StatePredictor类的state_表示robocentric的状态(k+1帧想对于k帧的状态),IESKF估计的就这个状态。
在processScan()中,performIESKF()执行完IESKF的校正过程后,会得到后验robocentric状态,然后执行integrateTransformation()更新到全局状态中:
void integrateTransformation() {
GlobalState filterState = filter_->state_;
globalState_.rn_ = globalState_.qbn_ * filterState.rn_ + globalState_.rn_;
globalState_.qbn_ = globalState_.qbn_ * filterState.qbn_;
globalState_.vn_ =
globalState_.qbn_ * filterState.qbn_.inverse() * filterState.vn_;
globalState_.ba_ = filterState.ba_;
globalState_.bw_ = filterState.bw_;
globalState_.gn_ = globalState_.qbn_ * filterState.gn_;
}
然后对滤波器进行重置:
filter_->reset(1)
将执行这段代码:
V3D covPos = INIT_POS_STD.array().square(); // 初始位姿协方差
double covRoll = pow(deg2rad(INIT_ATT_STD(0)), 2);
double covPitch = pow(deg2rad(INIT_ATT_STD(1)), 2);
double covYaw = pow(deg2rad(INIT_ATT_STD(2)), 2);
M3D vel_cov =
covariance_.block<3, 3>(GlobalState::vel_, GlobalState::vel_);
M3D acc_cov =
covariance_.block<3, 3>(GlobalState::acc_, GlobalState::acc_);
M3D gyr_cov =
covariance_.block<3, 3>(GlobalState::gyr_, GlobalState::gyr_);
M3D gra_cov =
covariance_.block<3, 3>(GlobalState::gra_, GlobalState::gra_);
covariance_.setZero();
covariance_.block<3, 3>(GlobalState::pos_, GlobalState::pos_) =
covPos.asDiagonal(); // pos 位置的协方差设置为初始默认值
covariance_.block<3, 3>(GlobalState::vel_, GlobalState::vel_) =
state_.qbn_.inverse() * vel_cov * state_.qbn_; // vel
covariance_.block<3, 3>(GlobalState::att_, GlobalState::att_) =
V3D(covRoll, covPitch, covYaw).asDiagonal(); // att 姿态的协方差设置为初始默认值
covariance_.block<3, 3>(GlobalState::acc_, GlobalState::acc_) = acc_cov;
covariance_.block<3, 3>(GlobalState::gyr_, GlobalState::gyr_) = gyr_cov;
covariance_.block<3, 3>(GlobalState::gra_, GlobalState::gra_) =
state_.qbn_.inverse() * gra_cov * state_.qbn_;
state_.rn_.setZero();
state_.vn_ = state_.qbn_.inverse() * state_.vn_;
state_.qbn_.setIdentity();
state_.gn_ = state_.qbn_.inverse() * state_.gn_;
state_.gn_ = state_.gn_ * 9.81 / state_.gn_.norm();
重置协方差矩阵covariance_,重置robocentric状态。
3.1 状态预测 processImu()
switch (status_) {
case STATUS_INIT:
break;
case STATUS_FIRST_SCAN: // 第一帧-第二帧之间
preintegration_->push_back(dt, acc, gyr); // 进行预积分
filter_->time_ += dt;
acc_0_ = acc;
gyr_0_ = gyr;
break;
case STATUS_RUNNING: // 第二帧后
filter_->predict(dt, acc, gyr, true);
break;
default:
break;
}
第一帧-第二帧之间时此时滤波器还没有初始化,会进行预积分用于估计之后的匹配初值,第二帧后滤波器初始化了就开始执行ESKF的预测传播过程。
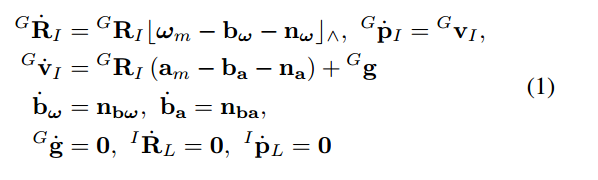
预测步骤如下:
首先对robocentric状态进行传播
GlobalState state_tmp = state_;
V3D un_acc_0 = state_tmp.qbn_ * (acc_last - state_tmp.ba_) + state_tmp.gn_;
V3D un_gyr = 0.5 * (gyr_last + gyr) - state_tmp.bw_;
Q4D dq = axis2Quat(un_gyr * dt);
state_tmp.qbn_ = (state_tmp.qbn_ * dq).normalized();
V3D un_acc_1 = state_tmp.qbn_ * (acc - state_tmp.ba_) + state_tmp.gn_;
V3D un_acc = 0.5 * (un_acc_0 + un_acc_1);
// State integral
state_tmp.rn_ = state_tmp.rn_ + dt * state_tmp.vn_ + 0.5 * dt * dt * un_acc;
state_tmp.vn_ = state_tmp.vn_ + dt * un_acc;
误差状态的均值由于恒定为0,所以不需要传播,只需要更新误差状态的协方差矩阵:
if (update_jacobian_) {
MXD Ft =
MXD::Zero(GlobalState::DIM_OF_STATE_, GlobalState::DIM_OF_STATE_);
Ft.block<3, 3>(GlobalState::pos_, GlobalState::vel_) = M3D::Identity();
Ft.block<3, 3>(GlobalState::vel_, GlobalState::att_) =
-state_tmp.qbn_.toRotationMatrix() * skew(acc - state_tmp.ba_);
Ft.block<3, 3>(GlobalState::vel_, GlobalState::acc_) =
-state_tmp.qbn_.toRotationMatrix();
Ft.block<3, 3>(GlobalState::vel_, GlobalState::gra_) = M3D::Identity();
Ft.block<3, 3>(GlobalState::att_, GlobalState::att_) =
- skew(gyr - state_tmp.bw_);
Ft.block<3, 3>(GlobalState::att_, GlobalState::gyr_) = -M3D::Identity();
MXD Gt =
MXD::Zero(GlobalState::DIM_OF_STATE_, GlobalState::DIM_OF_NOISE_);
Gt.block<3, 3>(GlobalState::vel_, 0) = -state_tmp.qbn_.toRotationMatrix();
Gt.block<3, 3>(GlobalState::att_, 3) = -M3D::Identity();
Gt.block<3, 3>(GlobalState::acc_, 6) = M3D::Identity();
Gt.block<3, 3>(GlobalState::gyr_, 9) = M3D::Identity();
Gt = Gt * dt;
const MXD I =
MXD::Identity(GlobalState::DIM_OF_STATE_, GlobalState::DIM_OF_STATE_);
F_ = I + Ft * dt + 0.5 * Ft * Ft * dt * dt;
// jacobian_ = F * jacobian_;
covariance_ =
F_ * covariance_ * F_.transpose() + Gt * noise_ * Gt.transpose();
covariance_ = 0.5 * (covariance_ + covariance_.transpose()).eval();
}
3.2 观测校正 processPCL()
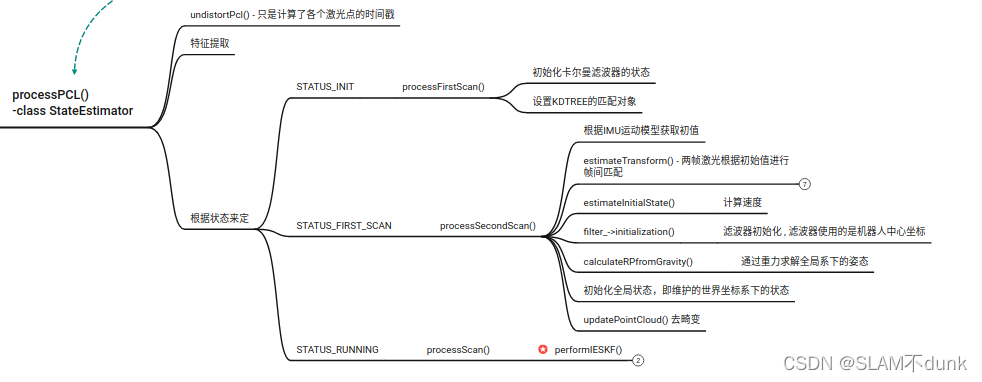 第一帧和第二帧直接点云匹配求解速度信息,然后初始化滤波器,初始化后执行processScan()来执行滤波器的校正环节。
第一帧和第二帧直接点云匹配求解速度信息,然后初始化滤波器,初始化后执行processScan()来执行滤波器的校正环节。
3.2.1 processSecondScan()

源码中用预积分求解帧间预测的部分有点问题,linState_.gn_ 此时是
(
0.0
,
0.0
,
−
G
0
)
(0.0, 0.0, -G0)
(0.0,0.0,−G0), 但是实际上应该要使用在第一帧坐标系下的重力表示,代码中这么做可能是默认为初始位姿是垂直地面向下的。
下面这一部分代码是通过预积分求解second-scan与first-scan之间的预测位姿:
// Calculate relative transform, linState_, using ICP method
V3D pl;
Q4D ql;
V3D v0, v1, ba0, bw0;
ba0.setZero();
ql = preintegration_->delta_q;
pl = preintegration_->delta_p +
0.5 * linState_.gn_ * preintegration_->sum_dt *
preintegration_->sum_dt -
0.5 * ba0 * preintegration_->sum_dt * preintegration_->sum_dt;
对于于预积分有: α k + 1 k = R W k ( p k + 1 W − p k W + 1 2 g W Δ t 2 − v k W Δ t ) γ k + 1 k = q W k ⊗ q k + 1 W \alpha^k_{k+1}=R_W^{k}(p_{k+1}^W-p_k^W+\frac{1}{2}g^W\Delta t^2-v_k^W\Delta t)\\\gamma_{k+1}^k=q_W^k\otimes q_{k+1}^W αk+1k=RWk(pk+1W−pkW+21gWΔt2−vkWΔt)γk+1k=qWk⊗qk+1W 认为第一帧速度为0。
这里初始化感觉也是有问题的:
filter_->initialization(scan_new_->time_, r1, v1, ba0, bw0, imu_last_.acc,
imu_last_.gyr);
这里应该是初始化robocentric状态的初始值,位移p应该设置为0,而这里传入了r1,此外,重力应该设置为第2帧下的观测值,但这里这里并没有重新初始化重力。
4.2.2 processScan()
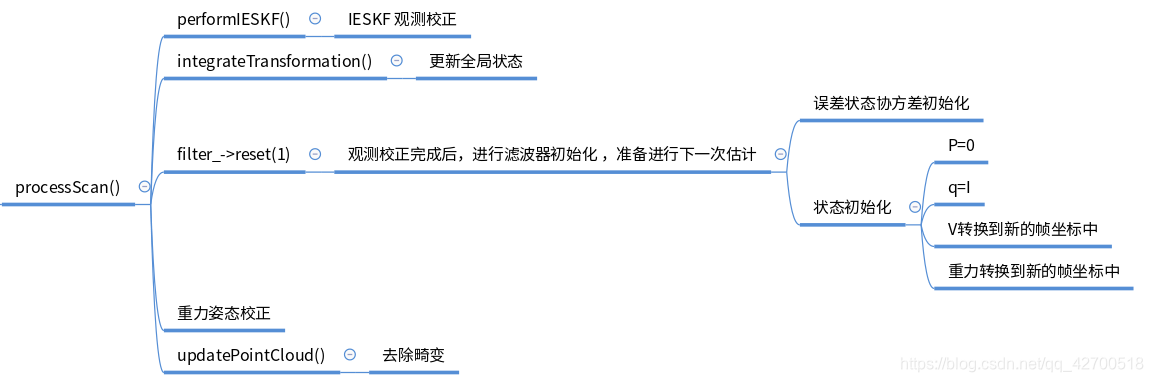 重点是:
重点是: performIESKF()
FAST-LIO
核心处理线程是 LaserMapping::Run(),该线程中,首先通过LaserMapping::SyncPackages()去提取出一帧雷达数据与包围的IMU数据的集合,然后将数据传入到 ImuProcess::Process()执行卡尔曼滤波的预测以及点云的去畸变,
初始化
首先关注最核心的估计器的初始化,fastlio使用的估计器是esekf类:
template <typename state, int process_noise_dof, typename input = state, typename measurement = state,
int measurement_noise_dof = 0>
class esekf {...}
所使用的对象是:esekfom::esekf<state_ikfom, 12, input_ikfom> kf_;
即所使用的状态state是state_ikfom,process_noise_dof为12,input_ikfom为input_ikfom。
在bool LaserMapping::InitROS(ros::NodeHandle &nh)中,对kf_进行了初始化:
kf_.init_dyn_share(
get_f, df_dx, df_dw,
[this](state_ikfom &s, esekfom::dyn_share_datastruct<double> &ekfom_data) { ObsModel(s, ekfom_data); },
options::NUM_MAX_ITERATIONS, epsi.data());
其中init_dyn_share()如下:
void init_dyn_share(processModel f_in, processMatrix1 f_x_in, processMatrix2 f_w_in,
measurementModel_dyn_share h_dyn_share_in, int maximum_iteration, scalar_type limit_vector[n]) {
f = f_in;
f_x = f_x_in;
f_w = f_w_in;
h_dyn_share = h_dyn_share_in;
maximum_iter = maximum_iteration;
for (int i = 0; i < n; i++) {
limit[i] = limit_vector[i];
}
x_.build_S2_state();
x_.build_SO3_state();
x_.build_vect_state();
}
在执行ImuProcess::Process时,如果没有初始化imu_need_init_==false,那么会去执行ImuProcess::IMUInit完成初始化,ImuProcess::IMUInit初始化的流程是:
1、通过迭代的方式计算 mean_acc_、mean_gyr_、cov_acc_、cov_gyr_。
2、初始化ieskf的状态:
state_ikfom init_state = kf_state.get_x();
init_state.grav = S2(-mean_acc_ / mean_acc_.norm() * common::G_m_s2);
init_state.bg = mean_gyr_;
init_state.offset_T_L_I = Lidar_T_wrt_IMU_;
init_state.offset_R_L_I = Lidar_R_wrt_IMU_;
kf_state.change_x(init_state);
上面将初始状态中角速度偏置设置为mean_gyr_,重力设置为了在当前IMU坐标系下的重力观测。
3、初始化协方差矩阵
esekfom::esekf<state_ikfom, 12, input_ikfom>::cov init_P = kf_state.get_P();
init_P.setIdentity();
init_P(6, 6) = init_P(7, 7) = init_P(8, 8) = 0.00001;
init_P(9, 9) = init_P(10, 10) = init_P(11, 11) = 0.00001;
init_P(15, 15) = init_P(16, 16) = init_P(17, 17) = 0.0001;
init_P(18, 18) = init_P(19, 19) = init_P(20, 20) = 0.001;
init_P(21, 21) = init_P(22, 22) = 0.00001;
kf_state.change_P(init_P);
ieskf预测环节
ImuProcess::UndistortPcl()
在ImuProcess::Process()中,初始化完毕后,就会执行ImuProcess::UndistortPcl(), 在这个函数里执行ieskf的状态预测以及点云的畸变去除。
在ImuProcess::UndistortPcl()中,会对于所有IMU遍历执行:kf_state.predict(dt, Q_, in);,其中dt表示时间差,in为传感器输入信号:
// 传感器输入-加速度信息与角速度信息
in.acc = acc_avr;
in.gyro = angvel_avr;
// 输入噪声-传感器观测噪声+bias随机游走噪声
Q_.block<3, 3>(0, 0).diagonal() = cov_gyr_;
Q_.block<3, 3>(3, 3).diagonal() = cov_acc_;
Q_.block<3, 3>(6, 6).diagonal() = cov_bias_gyr_;
Q_.block<3, 3>(9, 9).diagonal() = cov_bias_acc_;
kf_state.predict(dt, Q_, in);
其中acc_avr,angvel_avr就是IMU测量的中值:
// 中值
angvel_avr << 0.5 * (head->angular_velocity.x + tail->angular_velocity.x),
0.5 * (head->angular_velocity.y + tail->angular_velocity.y),
0.5 * (head->angular_velocity.z + tail->angular_velocity.z);
acc_avr << 0.5 * (head->linear_acceleration.x + tail->linear_acceleration.x),
0.5 * (head->linear_acceleration.y + tail->linear_acceleration.y),
0.5 * (head->linear_acceleration.z + tail->linear_acceleration.z);
// 对加速度观测进行尺度转换,保证加速度是和9.8为同一标准的
acc_avr = acc_avr * common::G_m_s2 / mean_acc_.norm(); // - state_inout.ba;
Q_是测量噪声矩阵,cov_gyr_和cov_acc_是陀螺仪和加速度计测量噪声,它的值在IMU初始化时确定:
for (const auto &imu : meas.imu_) {
const auto &imu_acc = imu->linear_acceleration;
const auto &gyr_acc = imu->angular_velocity;
cur_acc << imu_acc.x, imu_acc.y, imu_acc.z;
cur_gyr << gyr_acc.x, gyr_acc.y, gyr_acc.z;
mean_acc_ += (cur_acc - mean_acc_) / N;
mean_gyr_ += (cur_gyr - mean_gyr_) / N;
// 这里计算IMU的测量噪声,在后面EKF的前向传播中会使用
cov_acc_ =
cov_acc_ * (N - 1.0) / N + (cur_acc - mean_acc_).cwiseProduct(cur_acc - mean_acc_) * (N - 1.0) / (N * N);
cov_gyr_ =
cov_gyr_ * (N - 1.0) / N + (cur_gyr - mean_gyr_).cwiseProduct(cur_gyr - mean_gyr_) * (N - 1.0) / (N * N);
N++;
}
cov_bias_gyr_、cov_bias_acc_是角速度bias随机游走噪声和加速度bias随机游走噪声,这个值需要离线的标定去获得。
得到数值后通过下面代码进行设置就行。
void ImuProcess::SetGyrBiasCov(const common::V3D &b_g) { cov_bias_gyr_ = b_g; }
void ImuProcess::SetAccBiasCov(const common::V3D &b_a) { cov_bias_acc_ = b_a; }
kf_state.predict(dt, Q_, in)
到这里正式进入IESKF的预测过程,首先看下面的代码:
void predict(double &dt, processnoisecovariance &Q, const input &i_in) {
// f函数对应use-ikfom.hpp中的 get_f函数,对应fast_lio2论文公式(2)
flatted_state f_ = f(x_, i_in); // typedef Matrix<scalar_type, m, 1> flatted_state;
cov_ f_x_ = f_x(x_, i_in);
cov f_x_final;
Matrix<scalar_type, m, process_noise_dof> f_w_ = f_w(x_, i_in);
Matrix<scalar_type, n, process_noise_dof> f_w_final;
state x_before = x_;
x_.oplus(f_, dt); // 对状态进行传播
...
从前面的初始化可以知道,f()是get_f()函数,f_x()是df_dx()函数,f_w()是df_dw()函数,均定义在use-ikfom.hpp中,
get_f()计算状态的前向传播,参考如下公式:
Eigen::Matrix<double, 24, 1> get_f(state_ikfom &s, const input_ikfom &in) {
Eigen::Matrix<double, 24, 1> res = Eigen::Matrix<double, 24, 1>::Zero();
vect3 omega;
in.gyro.boxminus(omega, s.bg); // 去偏置
vect3 a_inertial = s.rot * (in.acc - s.ba); // 加速度去偏置,再转换到滤波器起始坐标
for (int i = 0; i < 3; i++) {
res(i) = s.vel[i]; // 位置的微分
res(i + 3) = omega[i]; // 角速度
res(i + 12) = a_inertial[i] + s.grav[i]; // 速度的微分
}
return res;
}
df_dx()计算状态传播方程关于状态的线性化jacobian矩阵,df_dw()计算状态传播方程关于测量输入和噪声的线性化jacobian矩阵,参考如下公式:
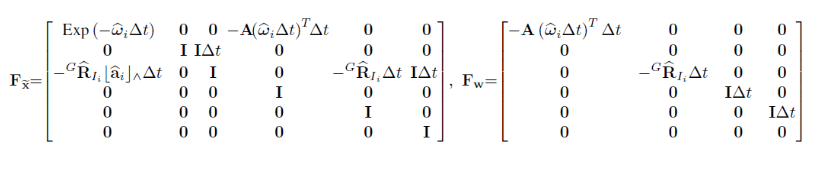
Eigen::Matrix<double, 24, 23> df_dx(state_ikfom &s, const input_ikfom &in) {
Eigen::Matrix<double, 24, 23> cov = Eigen::Matrix<double, 24, 23>::Zero();
cov.template block<3, 3>(0, 12) = Eigen::Matrix3d::Identity();
vect3 acc_;
in.acc.boxminus(acc_, s.ba);
vect3 omega;
in.gyro.boxminus(omega, s.bg);
cov.template block<3, 3>(12, 3) = -s.rot.toRotationMatrix() * MTK::hat(acc_);
cov.template block<3, 3>(12, 18) = -s.rot.toRotationMatrix();
Eigen::Matrix<state_ikfom::scalar, 2, 1> vec = Eigen::Matrix<state_ikfom::scalar, 2, 1>::Zero();
Eigen::Matrix<state_ikfom::scalar, 3, 2> grav_matrix;
s.S2_Mx(grav_matrix, vec, 21);
cov.template block<3, 2>(12, 21) = grav_matrix;
cov.template block<3, 3>(3, 15) = -Eigen::Matrix3d::Identity();
return cov;
}
Eigen::Matrix<double, 24, 12> df_dw(state_ikfom &s, const input_ikfom &in) {
Eigen::Matrix<double, 24, 12> cov = Eigen::Matrix<double, 24, 12>::Zero();
cov.template block<3, 3>(12, 3) = -s.rot.toRotationMatrix();
cov.template block<3, 3>(3, 0) = -Eigen::Matrix3d::Identity();
cov.template block<3, 3>(15, 6) = Eigen::Matrix3d::Identity();
cov.template block<3, 3>(18, 9) = Eigen::Matrix3d::Identity();
return cov;
}
后面的代码实在太混乱了,实在劝退,直接看LINS的代码算了。。。不过fast lio的核心还是在与ikdtree和一个快速的卡尔曼增益求解公式,这两个部分可以重点去了解。














 887
887











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









