







LeGo-LOAM
A lightweight and ground optimized lidar odometry and mapping (LeGO-LOAM) system for ROS compatible UGVs. The system takes in point cloud from a Velodyne VLP-16 Lidar (placed horizontal) and optional IMU data as inputs. It outputs 6D pose estimation in real-time.
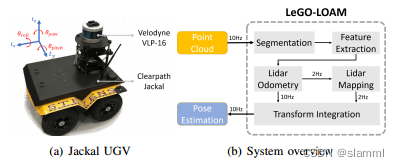
简单介绍一下LeGO-LOAM(激光SLAM,IMU+LiDAR),以LOAM为基础,实现与其同等的精度同时大大提高了速度。利用点云分割区分噪声,提取平面与边特征,使用两步LM优化方法求解位姿,并且添加回环检测减小漂移。
接下来直接切入代码部分:
github:https://github.com/RobustFieldAutonomyLab/LeGO-LOAM
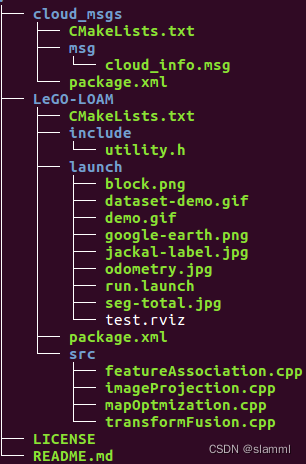
首先看一下代码结构,非常清晰,cloud_msgs、launch、include、src(核心程序),接下来具体看一下:
-
CMakeList.txt
... find_package(GTSAM REQUIRED QUIET) find_package(PCL REQUIRED QUIET) find_package(OpenCV REQUIRED QUIET) ...依赖库:GTSAM、PCL、OPenCV
这里简单介绍一下GTSAM,GTSAM 是一个在机器人领域和计算机视觉领域用于平滑(smoothing)和建图(mapping)的C++库,采用因子图(factor graphs)和贝叶斯网络(Bayes networks)的方式最大化后验概率。如果想深入了解,可以查看参考资料[2]。
-
launch/run.launch
节点:rviz、camera_init_to_map、base_link_to_camera、imageProjection、featureAssociation、mapOptmization、transformFusion
主要节点就是后4个,也是对应src目录下的核心程序。
-
include/utility.h
定义数据结构:点云、话题、激光雷达参数、图像分割参数、特征提取参数、优化参数、建图参数
... /* * A point cloud type that has "ring" channel */ struct PointXYZIR { PCL_ADD_POINT4D; PCL_ADD_INTENSITY; uint16_t ring; EIGEN_MAKE_ALIGNED_OPERATOR_NEW } EIGEN_ALIGN16; POINT_CLOUD_REGISTER_POINT_STRUCT (PointXYZIR, (float, x, x) (float, y, y) (float, z, z) (float, intensity, intensity) (uint16_t, ring, ring) ) ...这里定义了一种包含ring_id的点云数据类型,velodyne的激光雷达是有这个数据的,其它厂商的不一定有;区别于laser_id,ring_id是指从最下面的激光线依次向上递增的线号(0-15 for VLP-16)。
... // Using velodyne cloud "ring" channel for image projection (other lidar may have different name for this channel, change "PointXYZIR" below) extern const bool useCloudRing = false; // if true, ang_res_y and ang_bottom are not used // VLP-16 extern const int N_SCAN = 16;//number of lasers extern const int Horizon_SCAN = 1800;//number of points from one laser of one scan extern const float ang_res_x = 0.2;//angle resolution of horizon extern const float ang_res_y = 2.0;//angle resolution of vertical extern const float ang_bottom = 15.0+0.1; extern const int groundScanInd = 7;//表示地面需要的线圈数; ...针对不同激光雷达的参数设置,要根据自己的实际情况去调整,假如你是用数据集的数据,比如KITTI,就需要针对HDL-64E进行调整,而且由于该雷达垂直角分辨率不是均匀的,还需要自己编写后续的投影程序。
接下来切入核心程序,由于有四个cpp,为了不要过长,今天先剖析一下imageProjection.cpp。
-
src/imageProjection.cpp
总体流程:订阅点云数据回调处理->点云转换到pcl预处理->截取一帧激光数据->投影映射到图像->地面移除->点云分割->发布点云数据->重置参数;
订阅到激光雷达数据的回调处理函数:
void cloudHandler(const sensor_msgs::PointCloud2ConstPtr& laserCloudMsg){ // 1. Convert ros message to pcl point cloud copyPointCloud(laserCloudMsg);//使用pcl库函数; // 2. Start and end angle of a scan findStartEndAngle();//1.一圈数据的角度差,使用atan2计算;2.注意计算结果的范围合理性 // 3. Range image projection projectPointCloud();//将激光雷达数据投影成一个16x1800(依雷达角分辨率而定)的点云阵列 // 4. Mark ground points groundRemoval();//根据上下两线之间点的位置计算两线之间俯仰角判断,小于10度则为地面点 // 5. Point cloud segmentation cloudSegmentation();//首先对点云进行聚类标记,根据标签进行对应点云块存储; // 6. Publish all clouds publishCloud();//发布各类点云数据 // 7. Reset parameters for next iteration resetParameters(); }projectPointCloud():将3D point cloud投影映射到2D range image
// find the row and column index in the image for this point if (useCloudRing == true){ rowIdn = laserCloudInRing->points[i].ring; }else{ verticalAngle = atan2(thisPoint.z, sqrt(thisPoint.x * thisPoint.x + thisPoint.y * thisPoint.y)) * 180 / M_PI; rowIdn = (verticalAngle + ang_bottom) / ang_res_y;//确定行索引 } horizonAngle = atan2(thisPoint.x, thisPoint.y) * 180 / M_PI; columnIdn = -round((horizonAngle-90.0)/ang_res_x) + Horizon_SCAN/2;//确定列索引 range = sqrt(thisPoint.x * thisPoint.x + thisPoint.y * thisPoint.y + thisPoint.z * thisPoint.z);//确定深度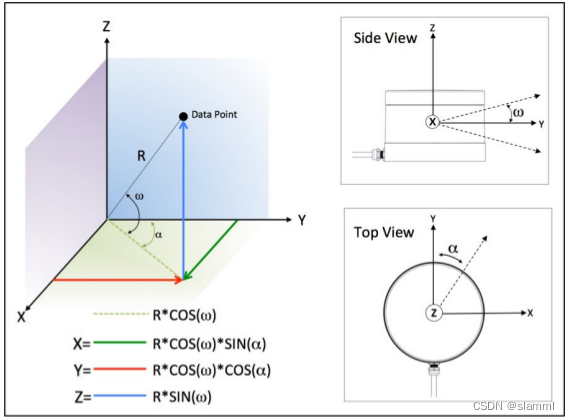
激光雷达坐标系 atan2(y,x);
反正切的角度等于X轴与通过原点和给定坐标点(x, y)的直线之间的夹角,结果为正表示从X轴逆时针旋转的角度,结果为负表示从X轴顺时针旋转的角度;
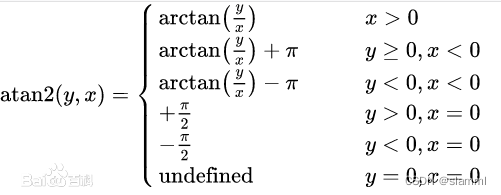
atan2函数 1.确定行索引
根据ring id或者根据坐标计算:
θ v = a t a n 2 ( z / ( x 2 + y 2 ) 1 / 2 ) \theta_v=atan2(z/(x^2+y^2)^{1/2}) θv=atan2(z/(x2+y2)1/2)
r o w = ( θ v + θ b o t t o m ) / r e s o l u t i o n v row = (\theta_v+\theta_{bottom})/resolution_v row
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1090
1090











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









