







 本文提出了一种新颖的方法,通过从原始地图数据构建车道图并利用LaneGCN捕捉复杂的拓扑结构和长程依赖,以提高动作预测中的参与者与车道之间的交互模型。作者在Argoverse数据集上展示了LaneGCN的有效性,通过模块消融和算子分析展示了其优势。
本文提出了一种新颖的方法,通过从原始地图数据构建车道图并利用LaneGCN捕捉复杂的拓扑结构和长程依赖,以提高动作预测中的参与者与车道之间的交互模型。作者在Argoverse数据集上展示了LaneGCN的有效性,通过模块消融和算子分析展示了其优势。
摘要
原文链接:https://arxiv.org/abs/2007.13732
提出了一种新颖的结构化地图表示:actor-map之间的交互。
直接从原始地图数据中构建车道图,目的是为了显式地保留地图结构。
提出LaneGCN的目的:为了捕获复杂的拓扑结构和车道图的长范围依赖关系。
利用了一个融合网络,包含了四种类型之间的交互:
参与者---车道;
车道---车道;
车道---参与者;
参与者---参与者。
1.Introduction
参与者的行为在很大程度上取决于地图拓扑结构。
将地图光栅化的过程不可避免地会导致信息丢失。
地图具有具有复杂拓扑结构的图形结构,2D卷积可能非常低效。
主要贡献:
(1)利用矢量化的地图数据构建车道图,提出了车道图卷积网络(LaneGCN);
(2)利用LaneGCN建模了四种类型的交互,参考图1;
(3)在Argoverse上取得了好成绩。

2.Related Work
VectorNet和LaneGCN之间有两个主要区别:
首先,VectorNet使用无向全连接的普通图网络,而我们根据地图拓扑构建了稀疏连接的车道图,并提出了任务特定的多类型和扩展图算子。
其次,VectorNet使用折线级节点进行交互,而我们的LaneGCN使用折线段作为地图节点来获取更高的分辨率。
3.Lane Graph Representations for Motion Forecasting
总体框架:
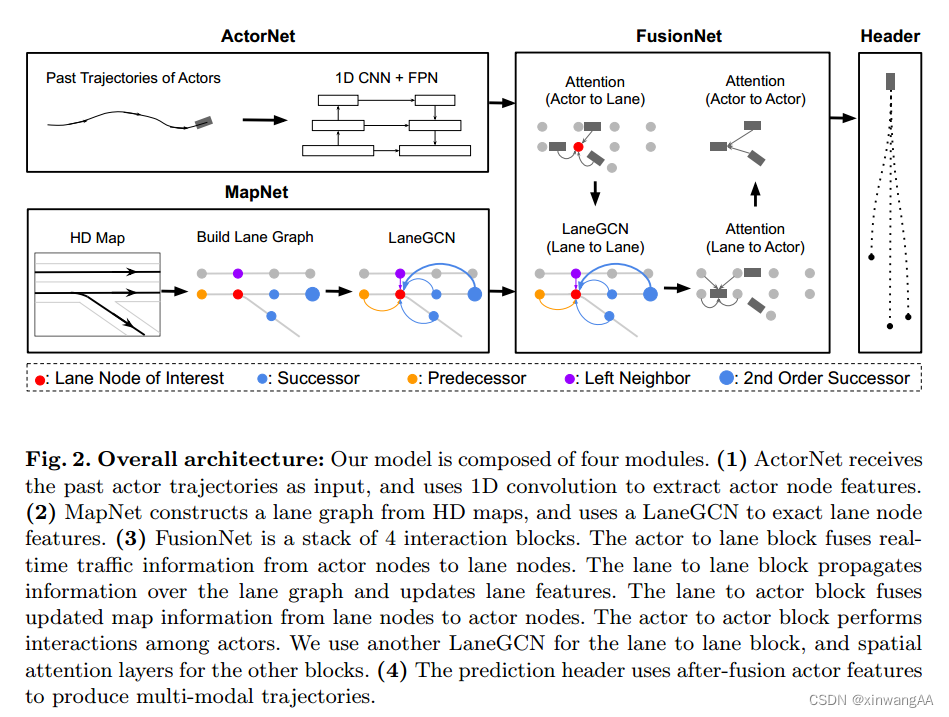
四个模块组成:
(1) ActorNet接收过去的行动者轨迹作为输入,使用1D卷积提取行动者节点特征。
(2) MapNet从高清地图中构建车道图,并使用LaneGCN精确提取车道节点特征。
(3) FusionNet是一个由4个交互块组成的堆栈。参与者到车道块融合了参与者节点到车道节点之间的实时交通信息。车道到车道块在车道图上传播信息并更新车道特征。车道到参与者块将更新的地图信息从车道节点融合到参与者节点。actor到actor块执行actor之间的交互。我们对车道到车道的块使用另一个LaneGCNÿ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1371
1371

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









