







 本文详细介绍了MOS管的外围电路设计,包括栅极电阻、GS电容放电电阻和C45电容的作用。同时,讨论了MOS管的选型要点,如耐压、额定电流、封装、Rdson、Vgs阈值电压以及快开管和慢开管的区别。在实际应用中,这些因素直接影响MOS管的性能和系统的稳定性。
本文详细介绍了MOS管的外围电路设计,包括栅极电阻、GS电容放电电阻和C45电容的作用。同时,讨论了MOS管的选型要点,如耐压、额定电流、封装、Rdson、Vgs阈值电压以及快开管和慢开管的区别。在实际应用中,这些因素直接影响MOS管的性能和系统的稳定性。
1.外围电路
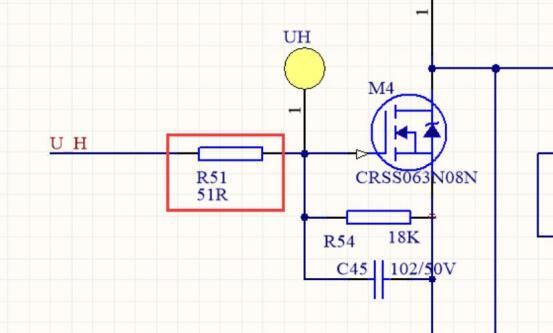
1.1.栅极电阻
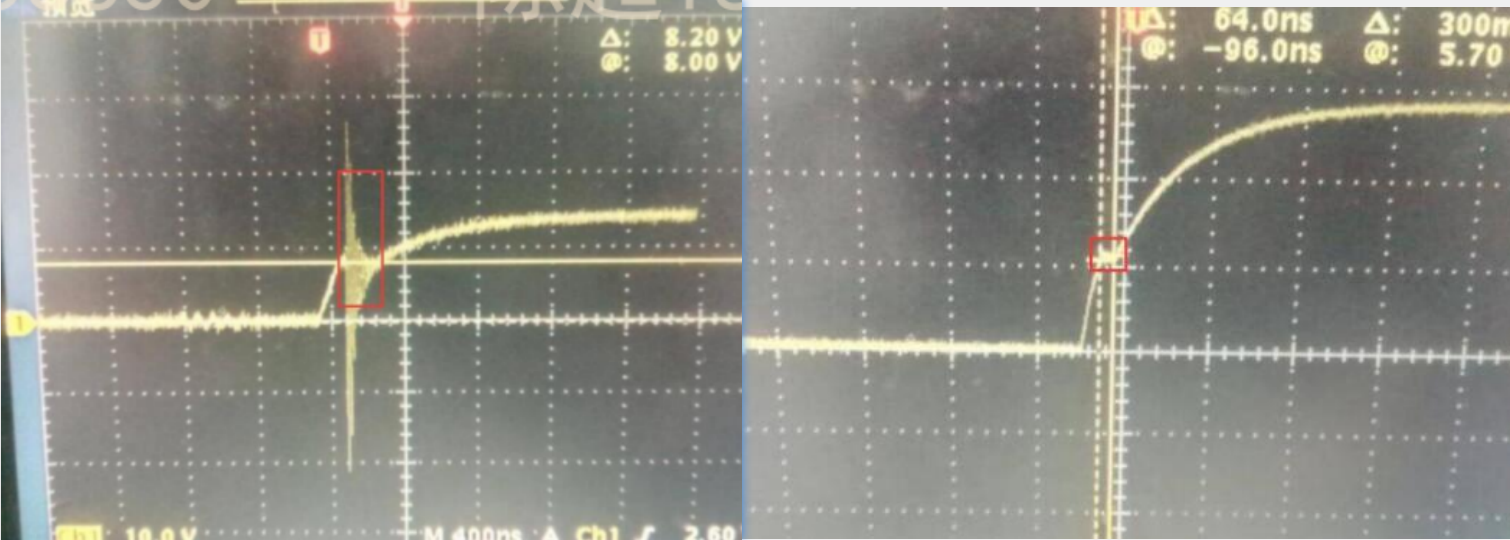
R51的栅极电阻可以控制MOS管的GS结电容的充放电速度。对于MOS管而言,开通速度越快,开通损耗越小。但是速度太快容易引起震荡,震荡波形(GS之间,这个震荡与MOS管的米勒效应有关)如下左图所示,而正常不震荡的波形如下右图所示。所以实际使用中希望开通速度尽量快,但是又不能发生震荡。此时需要根据实际调试的波形确定R51的阻值。
此外开通太快引起容易产生EMC的问题,此时因为du/dt很大,开通快dt小,那么DS开通过程中DS两端的压差在变小,如果Vbus的电压高,那么电压的变化du很大,所以du/dt很大。
1.2.GS电容放电电阻
R54的电阻是给GS电容提供放电回路,这个电阻的取值一般在10-50K之间。在板子没有上电的时候,有这个电阻GS之间就不会提供静电荷,尤其在搬运过程中,GS电容之间很容易积累电荷,或者静电作用到MOS管的G极,此时给GS电容充电可能会导致MOS管误导通。那么一旦上电后可能导致同一桥臂的MOS管同时导通造成短路。
1.3.C45电容
- 调整GS电容的充放电时间,因为和GS电容并联
- 给米勒电容提供泄放回路,如下图所示。MOS管的GD之间存在一个结电容称为米勒电容,下管导通时Vbus会有一部分电流流过这个米勒电容。米勒电容和C45串联,可以间接减少米勒电容(电容越串越小),改善米勒效应的影响。

2.MOS选型
2.1.耐压
一般选择Vbus电压的1.5-2倍。
2.2.额定电流
一般选择负载额定电流的5-7倍,余量需要留大一些,因为要考虑到电机堵转、负载突变等情况。
PS:
1.可以两个或者几个MOS管并联使用,在电动车和汽车行业等大功率场合下可以这样使用,此时多个MOS管并联可能比一个大功率的MOS管要便宜。并联使用时,可以使用一个预驱动芯片同时驱动多个MOS管。此外MOS管并联使用还需要考虑分流的问题,有的时候MOS管的参数不一致,导通和关断时间不一样,所以并联之后可能要让开关速度变慢。
2.MOS管耐压不够时,理论上可以串联使用,但是不建议这样用。
2.3.封装
MOS管的封装实际就是考虑温升问题,因为MOS是大功率发热器件。经验是在MOS管满负荷工作时,表面温度不要超过120度。这个温度就是个经验值。
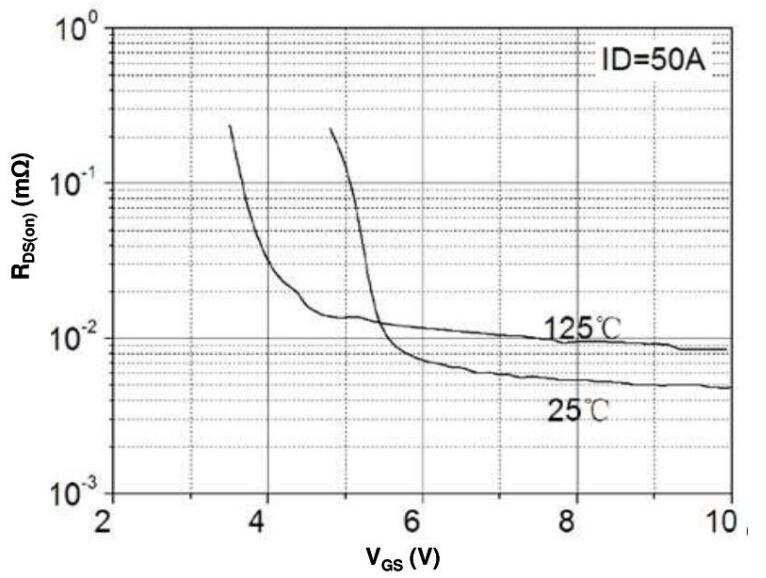
2.4.Rdson
MOS管一共有四类损耗,分别是打开损耗、关断损耗、导通损耗、续流损耗,前两个损耗是开关过程中的损耗,是MOS管经过放大区产生的损耗;后两种是开关结束之后的正常工作损耗。对于Rdson,对应导通损耗,这个阻值越大,相同电流的情况下导通损耗就越大,所以Rdson对导通损耗起到决定作用。因此Rdson越小越好,但是越小价格也越贵。
此外,温度越高,Rdson越大;Vgs电压越高,Rdson越小。并且当GS电压超过10V以上,Rdson减小就不明显了,所以MOS管的驱动电压经常选择12V或者15V,注意是驱动电压,也就是GS之间的电压。
2.5.Vgs阈值电压
一般Vgs的阈值电压都是正负20V,如下图所示,使用时不能超过这个阈值,否则可能导致MOS管损坏。
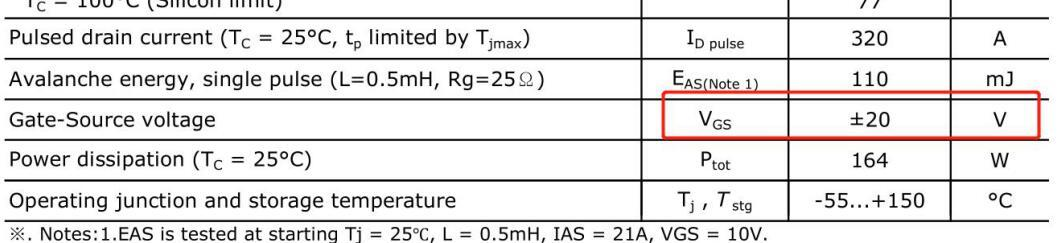
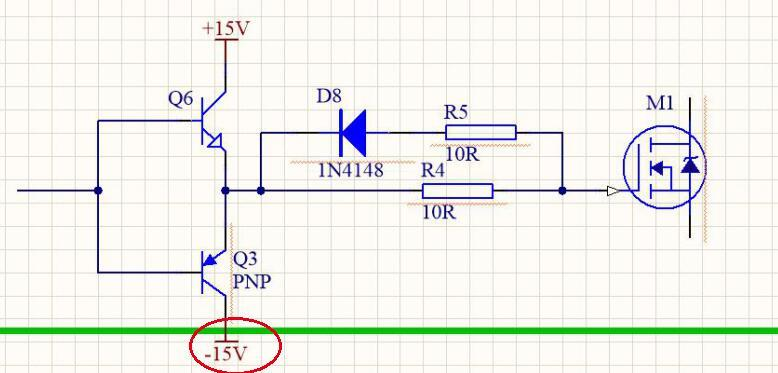
MOS管的开通阈值一般在2-4V之间,一般选择12-15V的驱动电压,0V关断。对于大功率或者要求较高的场合,也可以选择负压关断,如下图所示。大功率情况下关断快可以减小关断损耗,降低米勒效应的影响。此外负压关断的关断速度快,可以迅速越过放大区,不易发生震荡。
2.6.快开管和慢开管
快管通常Qg小,Rdson大,慢管相反。这个涉及到半导体的工艺,一般为了降低Rdson,晶圆面积就要做大,结果寄生电容相应变大,同理Qg也会变大。
Qg,Gate charge,门级电荷总和,一般管子的同流能力越强,Qg越大,速度也越慢。一般耐压高的MOS开得快,大电流的MOS开的慢。


















 1513
1513

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









