







阅读目录
[1] Zong, Yulong, et al. An intelligent and automated 3D surface defect detection system for quantitative 3D estimation and feature classification of material surface defects. Optics and Lasers in Engineering 144 (2021): 106633.
[2] Jovančević, Igor, et al. “3D point cloud analysis for detection and characterization of defects on airplane exterior surface.” Journal of Nondestructive Evaluation 36.4 (2017): 1-17.
[3] He, Yan, et al. “An Octree-Based Two-Step Method of Surface Defects Detection for Remanufacture.” International Journal of Precision Engineering and Manufacturing-Green Technology (2022): 1-16.
[4] Li, Xurui, et al. “Contour detection and salient feature line regularization for printed circuit board in point clouds based on geometric primitives.” Measurement 185 (2021): 109978.
[5] Cao, Xiaohui, et al. “Defect detection method for rail surface based on line-structured light.” Measurement 159 (2020): 107771.
[6] A Method for Automatic Surface Inspection Using a Model-Based 3D Descriptor
1. 3C相关
1.电路板轮廓检测
1.1完成部件分割任务
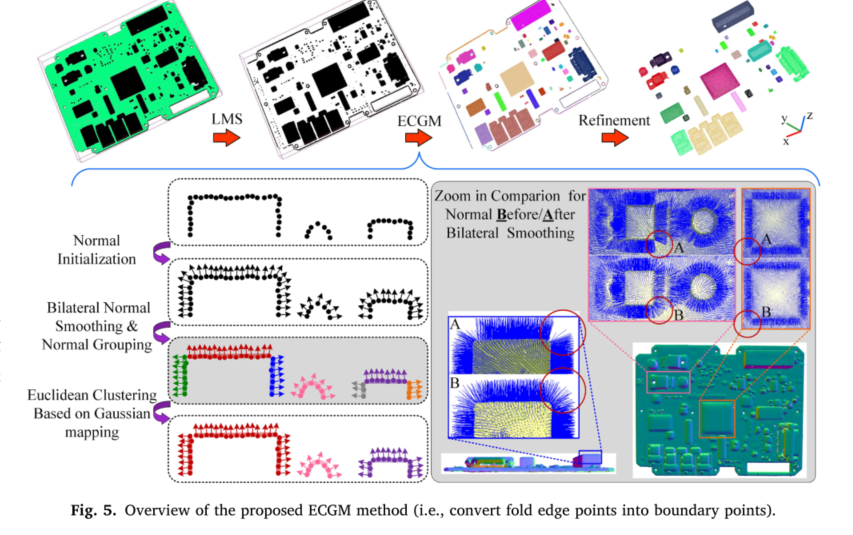
首先对电路板进行滤波处理—计算法向量—双边法向量滤波—基于高斯的欧几里得聚类(ECGM)
将滤波后的法向量进行高斯映射,转到高斯球中。关于高斯映射参考 高斯映射
ECGM方法:计算点p临近点(KD-tree得到),是否满足以下条件:加入了距离条件和角度条件。

1.2 检测PCB板的边缘部分
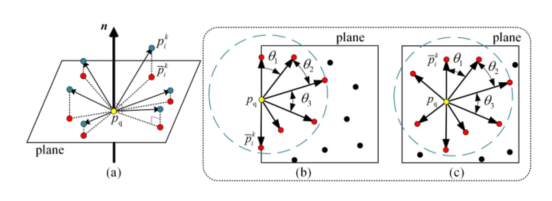
将点P附近的查询点进行投影,并将投影后的点和点P计算角度,将角度从小到大排序。
就算角度之间的差值存在>90,如果有,则说明为边界;反之。
2. 其他缺陷
1. 文物修复 —文献【1】
(一种智能、自动化的三维表面缺陷检测系统,用于材料表面缺陷的定量三维估计和特征分类)
作者针对文物修复工作设计了一套3D缺陷检测系统。
系统由两个单色相机、一个彩色相机和一个投影仪组成。
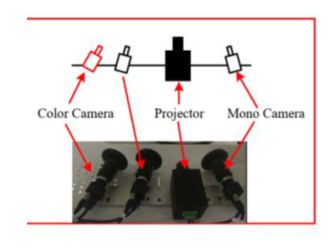
作者首先采用彩色相机行缺陷检测,检测出缺陷部分,并对缺陷部分进行标记。
然后对双目结构光相机采集数据进行匹配,完成对深度信息的提取。
建议图像和点云的映射关系,完成在点云中缺陷部分的标记。
如何建立映射关系:图像平面坐标系与世界坐标系的几何关系取决于从三维空间到图像的投影。根据相机标定计算出的投影矩阵,计算出彩色图像与三维点之间的点像映射关系。
2.飞机表面缺陷 —参考文献【2】
2.1 最小二乘法知识
可参考 最小二乘法理论 L2正则化
关于MLS移动最小二乘法演化过程:MLS演化过程
作者采用MLS 移动最小二乘法进行点云去噪处理。
2.2处理步骤
点云的法向量:
求区域点云的特征值和特征向量,将点云最小的特征值对应的特征向量当作法向量。
点云的曲率
取计算后的最小的三个特征值
如何发现缺陷区域:
将原始点云进行MLS,数据平滑;计算点云的法向量和曲率;利用类似区域生长的方法进行判断缺陷区域。
先选取种子点,然后计算种子点附近的法向量。如果法向量<阈值,将新计算的法向量纳入到种子点区域。
评估缺陷的信息
先将原始点云进行投影,将3D信息—>2D信息。
采用加权最小二乘法进行3D点重建。(重建后的点云平面光滑)
比较原始点云和缺陷点云之间的关系,进而评估缺陷的具体信息。
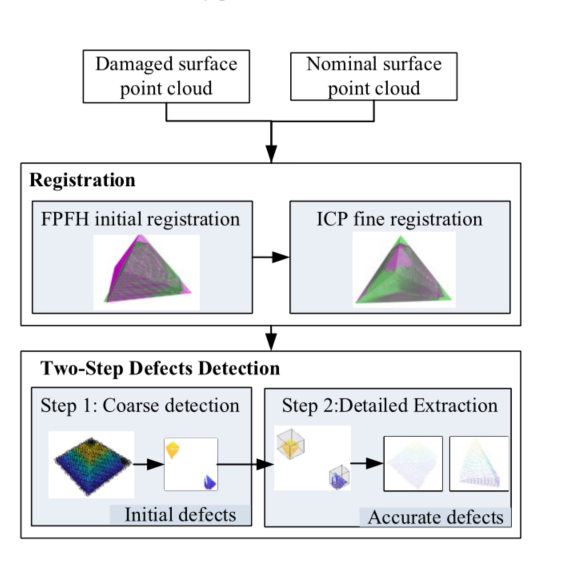
3.八叉树—表面缺陷检测方法
3.1检测的基本流程
4 钢轨表面缺陷检测
4.1检测流程
采集点云数据—去点云数据的(X,Z)平面数据,对数据进行拟合;
作者针对钢轨表面采用的二次曲线拟合。衡量拟合效果:残差置信区间。
作者将点云数据,假设有27个点。选取点 2,10,19。利用这三个点进行数据拟合;下次选取3,11,20这三个点进行数据拟合。拟合完的数据和原始数据做差值计算。计算出可疑点,计算方法为
P=n1/epoch.其中n1为记录为缺陷的点数,epoch为迭代拟合的轮次。当P大于设定的阈值,则认为该点处为缺陷区域。
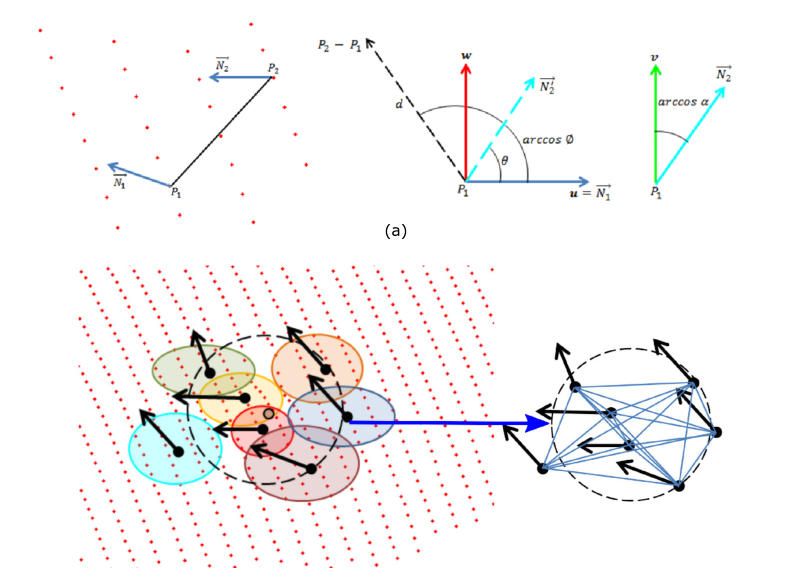
5 MPFH描述符下的表面缺陷检测
MPFH获取描述符的步骤:
首先采用J-linkage层次聚类方法完成对点云的模型分类,将分类模型记为,M。
借助周围邻域的点,计算点P的描述符:
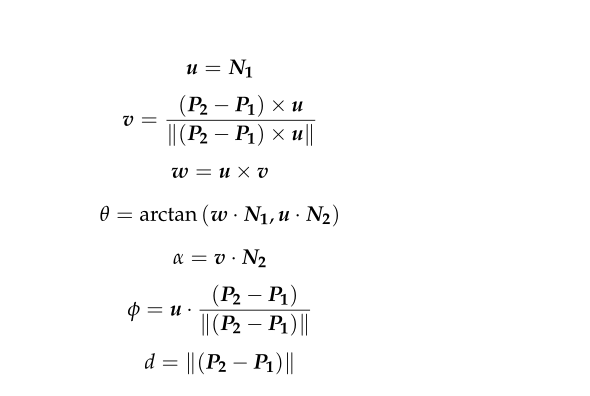
采用上述描述符即可完成对缺陷的检测。
如何将特征放到特征直方图内:
个人理解如下:首先将某个特则分割为n份,比如某个特征最大为1,最小为0.我们可以分为5份[0-1],计算点Pn和临近点Pt(假设有M个)的特征,统计计算后的特征落在划分区间的个数。完成特征直方图的绘制。
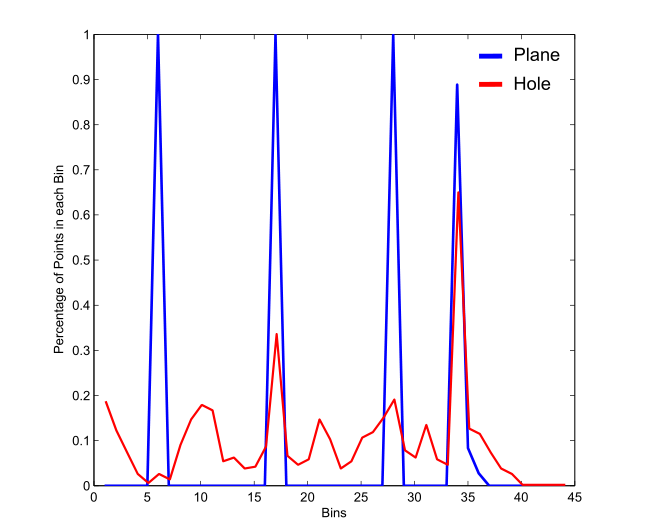
上述图片为无缺陷和空洞缺陷在各个模型M中的占比。
















 757
757











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











