






 本文探讨了深海环境中的水声传播模型,包括简正波模型及其在表面波导中的应用,深入研究了声源定位方法,如被动定位和基于多普勒效应的定位技术。同时,提出了适用于水下目标识别的迁移学习算法,解决数据量少且无标签的问题,通过深度神经网络和Siamese网络改进了目标识别的准确性。
本文探讨了深海环境中的水声传播模型,包括简正波模型及其在表面波导中的应用,深入研究了声源定位方法,如被动定位和基于多普勒效应的定位技术。同时,提出了适用于水下目标识别的迁移学习算法,解决数据量少且无标签的问题,通过深度神经网络和Siamese网络改进了目标识别的准确性。
@总结
#1.深海环境水声传播及声源定位方法研究(博士论文)
在第2章中作者介绍了声场传播的三种数学模型和其数值计算方法,还有四种声传播模式的特性分析。声场传播模型分别是:理想流体介质中的波动方程,射线模型和简正波模型。其中简正波模型假设水声环境为圆柱对称的分层介质,即环境仅随深度变化,在求解浅海低频声场时,具有精度高、运算量小的优点。然后对海底弹射、表面波导、表面波导泄漏和可靠声路径这四种声传播模式进行了介绍,并分析了它们泄露的能量大小,同时对海底弹射与表面波导泄漏能量进行了对比研究。
第三章中首先分析了声源和接收点深度对表面波导中传播损失的影响,发现当表面波导存在时,船载声呐、主/被动声呐浮标和吊放声呐在近海面工作的深度将严重影响声呐的性能。介绍了劳埃德镜和几何截止频率的概念,并使用真实的海洋环境进行试验和结果对比。然后作者介绍了简正波模型中表面波导的波达角概念。根据简正波理论,忽略简谐项 e x p ( − i w t ) exp(-iwt) exp(−iwt) ,远场的声压可以表示为一组简正波的叠加。同时还介绍了表面波导中的传播损失计算函数,给出了截止频率和声源深度变化时,声波的传播损失图像,,发现相干叠加波束的出射角与声源深度和频率相关,从而给出了声波的最优接收范围深度确定方法,并使用典型的深海环境进行仿真试验,将试验结果进一步推广到了一般的深海环境中。最后给出了简正波模型的深海环境下的仿真及结果分析,得出泄漏衰减强度与接收点深度和距离无关,从而给出泄露衰减系数的表达式,泄漏衰减与接收深度和距离无关,与声频率 f 和表面波导厚度 h 密切相关,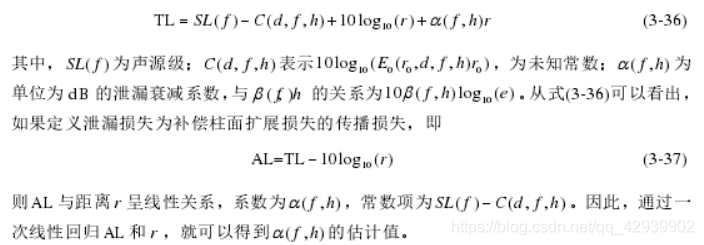
第四章提出一种深海环境下的窄带目标被动定位方法,该方法将目标的距离和深度分别估计,在每个参量的估计过程中均使用对该参量敏感的多途信息作为观测量,从而实
现稳健的目标定位。首先介绍了基于多途到达结构的三种定位方法,WSF-MF方法,TDOA方法和SE方法的原理,并对它们进行了试验数据验证,对试验数据进行了预处理,再分别进行定位试验和结果分析,发现WSF-MF 方法可以有效估计目标距离,而 TDOA 方法在目标深度估计方面具有较高的分辨率。同时第四章给了的联合WSF-MF方法和TDOA方法的利用海底反射信号实现被动定位的定位方法。其步骤如下:1.将垂直线列阵布放在近海面附近,接收目标辐射声信号,利用傅里叶变换观察信号功率较强频段,任意选取一个频段,通过窄带滤波器获得该频段信号并计算阵列的协方差矩阵;2.通过协方差矩阵的特征分解,获得信号子空间及其特征值,并在深度-距离网格点上搜索信号子空间与阵列流形向量空间距离的最小值,得到目标距离的估计值;3.由估计值计算海底反射波及海面海底反射波的到达角,设计空域滤波器获得这两个多途信号的加和信号;4.通过加和信号的自相关函数提取这两个多途的到达时延,并与模型计算结果比较,得到目标深度。
第5章中首先介绍了深海环境中的物理特性,即无影区特性和声传播特性(传播路径和多途到达结构)的原理及使用函数,并且使用WSF-MF方法对它们进行性能仿真分析,分别得到了信噪比、阵列孔径和声速剖面失配对 WSF-MF 方法的影响 。最后介绍了基于自相关函数的运动目标单水听器定位方法,将 D-SR 时延视为系统输出,声源的位置和速度视为系统状态,使用适用于弱非线性系统的扩展卡尔曼滤波,估计声源位置和速度。首先介绍了扩展卡尔曼滤波理论,给出了时延估计的定位方法、运动声源的扩展卡尔曼滤波模型和扩展卡尔曼滤波模型的迭代算法,并使用试验数据进行验证。
第六章中首先分析了劳埃德镜中明暗波束形成的物理机理及其迹的计算方法,分别给出了等声速波导环境的模态函数理论和深海环境的模态函数理论。然后介绍了单水听器在临界深度以下时中等距离内的三种干涉条纹的相关概念,图像结果分析及干涉条纹迹计算方法。最后提出两种基于干涉条纹的深度估计方法,适用于两种不同情况:1)声速剖面精确已知,并且声源深度固定。在这种情况下提出了一个代价函数,该函数量化不同声源深度下 STE 方法计算的条纹迹与测量的干涉条纹的匹配程度,用于估计声源深度。这种方法称为能量条纹匹配算法(MIS)。2)只存在声速剖面的粗略估计,或者声源深度存在起伏。此时使用条纹数目进行计算在一定的带宽内,条纹的数目与相邻条纹的频率间隔成反比。利用二维短时傅里叶变化(2D-FFT)可以粗略估计相邻条纹的频率间隔,然后与不同深度下 STE 方法估计的频率间隔比较,就可以粗略估计声源深度,这种方法称为频率间隔匹配算法(MFS)。然后对这两种方法的性能进行了分析,并使用真时的海上试验数据进行仿真验证。
#2.基于多勒普效应的水下目标定位(硕士论文)
在第二章中作者介绍了水下声波的传输特性,声波在水下传输过程中会产生时延、失真和衰减等传输损耗,主要有衰减损失和扩散损失这两种形式,声波在水中传播史还会产生多径效应,即从发射端发出的声波信号会经过各种路径到达接收端,导致接收端所接收到的信号会出现信号幅度的波动和信号的时延扩散的物理现象,同时环境噪声还会对我们的声波识别带来影响,通常用高斯分布的白噪声来代替海洋环境噪声。声波在水中传播时信号频率发生变化时会产生多勒普效应,导致多勒普效应的因素主要有2个,信号接收与发射点的相对运动和传输介质之间的移动。作者还介绍了了水下声波传输的信道模型,在水声数字通信系统的研究中,信道模型图可表示为: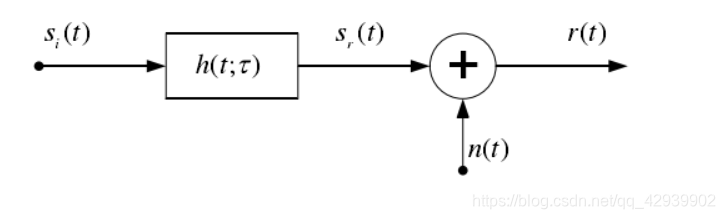
s i ( t ) 为 发 射 信 号 , h ( t ; τ ) 为 水 声 信 道 单 位 冲 激 响 应 , n ( t ) 为 信 道 噪 声 , s r ( t ) 为 经 过 信 道 后 的 信 号 , r ( t ) 为 接 收 信 号 , 其 中 t 为 时 间 变 量 , τ 为 时 间 延 迟 , 则 接 收 信 号 可 表 示 为 : s_i(t)为发射信号,h(t;\tau)为水声信道单位冲激响应,n(t)为信道噪声,s_r(t)为经过信道后的信号,r(t)为接收信号,其中 t 为时间变量,\tau为时间延迟,则接收信号可表示为: si(t)为发射信号,h
5.9总结
最新推荐文章于 2024-10-17 15:58:23 发布

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4061
4061

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









