









目录
0. 说明
为避免杂乱,对Task2第三问CartPole-v0的A2C、Task3的两个TD3,这三个任务分别建立单独的.py文件 (A2C_CartPole_v0.py、TD3_BipedalWalker.py、TD3_LunarLanderContinuous.py)编写实现,直接单独运行,不依赖作业提供的框架;对其余任务,在提供的框架上编写。
所有代码代码已设置为测试模式,即载入训练的模型进行测试,所有路径为相对路径可以直接运行。
1. Task 1 Implementing DQN
Nature DQN、Double DQN和Dueling DQN间的关系在下文的“个人理解”部分给出,这里仅给出训练曲线(对Dueling DQN具体用的是D3QN)。由于该环境训练较久(涉及对图片的卷积操作提取特征),这里并没有取不同的随机种子多次实验来判断算法的稳定性,且episodes的总数取值较小。
1.1 DQN for PongNoFrameskip-v4
探索概率epsilon的最小值分别设置为0.1、0.01(这里设置episolon会在前100episodes指数级递减为最小值),学习曲线如下图:


从这两图中及其他的实验结果,有三条发现:
- 可以看到较小的epsilon有助于DQN算法快速收敛,并且训练更加稳定、训练后期的回合奖励波动较小。
- 尽管epsilon取值0.1时(第一张图),训练收敛后的累积回报远小于20,但测试时其累积奖励能达到最优的20-21。因为训练时,在后期epsilon始终为0.1,随机动作的概率仍较大,会偏离策略网络的输出动作导致累积奖励偏小,但测试时不会使用0.1概率的随机动作仅贪心选择最优动作,即测试时的累积奖励不再受epsilon随机动作的影响。
- 从图中可以发现,就收敛速度而言,D3QN > Double DQN > Nature DQN,但就训练后期的稳定性以及最优性而言,却是Double DQN > Nature DQN > D3QN。造成不一致的原因可以是多样的:首先,相同的算法对不同的环境的适用情况不一样,不可能存在某一算法在任何环境下都优于另一算法,即在某些环境下,普通的Nature DQN的表现优于Double DQN或Double DQN优于D3QN是非常正常且常见的;其次,对同一环境,不同算法的最优超参数大概率不一样(尽管实验中的三算法都属于DQN系列),而实验中为求方便,参数都设置的相同,例如隐藏层都是128个神经元,学习率都为3e-4。这些可能导致一些误差。
2. Task 2 Implementing Policy Gradient
2.1 REINFORCE及变体 for CartPole-v0
对REINFORCE算法,其目标是最大化累积折扣奖励,目标梯度为:
∇
J
θ
(
θ
)
=
E
π
θ
[
∇
θ
l
o
g
π
θ
(
s
,
a
)
Q
(
s
,
a
)
]
\nabla J_\theta (\theta)=\mathbb E_{\pi_\theta}\,[\nabla_\theta log\,\pi_\theta(s,a)\,Q(s,a)]
∇Jθ(θ)=Eπθ[∇θlogπθ(s,a)Q(s,a)]其本质是,在当前时刻t,
G
t
G_t
Gt 或
Q
(
s
,
a
)
Q(s,a)
Q(s,a)大于0,则增大概率
π
(
s
,
a
)
\pi (s,a)
π(s,a)。故为让算法更好的收敛,需要让
G
t
G_t
Gt 有正有负。具体的实现中,对
G
t
G_t
Gt 减去均值后再除以标准差,即进行标准化让其有正有负(类似以均值作为基线)。
REINFORCE的改进版本,对
G
t
G_t
Gt 或
Q
(
s
,
a
)
Q(s,a)
Q(s,a)减去一个常数项,使其方差更小进而更容易训练与收敛。其目标梯度为:
∇
J
θ
(
θ
)
=
E
π
θ
[
∇
θ
l
o
g
π
θ
(
s
,
a
)
(
Q
(
s
,
a
)
−
b
(
s
)
)
]
\nabla J_\theta (\theta)=\mathbb E_{\pi_\theta}\,[\nabla_\theta log\,\pi_\theta(s,a)\,(Q(s,a)-b(s))]
∇Jθ(θ)=Eπθ[∇θlogπθ(s,a)(Q(s,a)−b(s))]从上式可以看到,
(
Q
(
s
,
a
)
−
b
(
s
)
)
(Q(s,a)-b(s))
(Q(s,a)−b(s))在更新策略网络
π
θ
\pi_\theta
πθ的过程中是一个常数项,与策略网络的参数
θ
\theta
θ无关,并且常数在优化的过程中会被学习率吸收,不会影响梯度。
对朴素的REINFORCE和REINFORCE with baseline两种算法分别在四个不同的随机种子 (1、2、3、4)下进行实验,绘制的学习曲线如下所示。可以看到,带基线的REINFORCE在训练后期更稳定。

2.2 A2C for CartPole-v0
与REINFORCE用蒙特卡洛采样轨迹获得当前状态动作价值函数
Q
(
s
,
a
)
Q(s,a)
Q(s,a)不同的是,A2C使用状态价值函数
V
(
s
)
V(s)
V(s),进而间接得到当前状态的动作价值函数:
Q
(
s
t
,
a
t
)
=
r
(
s
t
,
a
t
)
+
γ
V
(
s
t
+
1
)
Q(s_t,a_t)=r(s_t,a_t)+\gamma V(s_{t+1})
Q(st,at)=r(st,at)+γV(st+1)
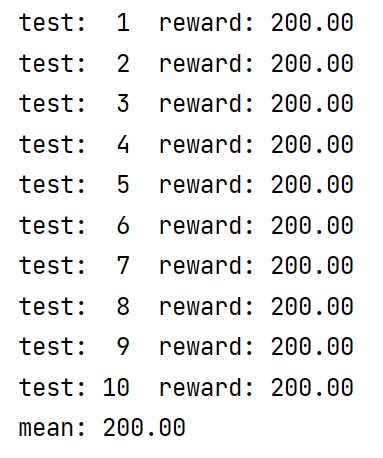
实验发现,在CartPole-v0环境下,A2C算法十分不稳定,对多数超参数都很敏感,这里仔细调参,并训练448个episodes后停止,因为继续训练模型会退化崩塌,具体参数见A2C_CartPole_v0.py开头的parse部分。
训练曲线及测试效果如下。

3. Task 3 Implementing DDPG (TD3)
3.1 DDPG与TD3
DDPG是一种AC结构,共有4个网络,分别是当前Actor、目标Actor、当前Critic、目标Critic。在实际使用中,DDPG已经被性能更优的TD3所代替,相比于DDPG(Deep Deterministic Policy Gradient),TD3(Twin Delayed Deep Deterministic Policy Gradient)有3处改进:
- Twin Q networks
即TD3的首字母T,与Double DQN的思想一致 (但Double DQN并没有显式地使用两个目标Q网络和两个当前Q网络),TD3中使用两个当前Critic网络、两个目标Critic网络来减缓高估问题。具体地,一般采用两个孪生网络的最小者或均值作为最终Q值来减缓高估。这样一来,TD3共有6个网络:当前Actor、目标Actor、当前Critic2(twin)、目标Critic2(twin)。 - 延迟更新
即TD3中的第一个D,Delayed,即更新Actor网络和目标网络的频率小于Critic网络。由于Actor网络和Critic网络存在相互依赖的关系,当评价网络Critic存在较大误差时,肯定不能准确地指引Actor网络的更新。延迟更新的思想就是多次更新当前Critic网络后才更新一次Actor网络,希望Critic更加准确后再来指引Actor的更新。 - 使用探索噪声与策略噪声
在Actor网络输出一个确定性的动作 u θ ( s ) u_\theta(s) uθ(s)后,并不直接使用该动作,而是在 u θ ( s ) u_\theta(s) uθ(s)上加上0均值的探索噪声并clip到合法区间;在计算目标 Q ( s t + 1 , a t + 1 ) Q(s_{t+1},a_{t+1}) Q(st+1,at+1)时,下一时刻的动作也添加策略,希望训练更新平滑、稳定。
3.2 TD3 for LunarLanderContinuous-v2
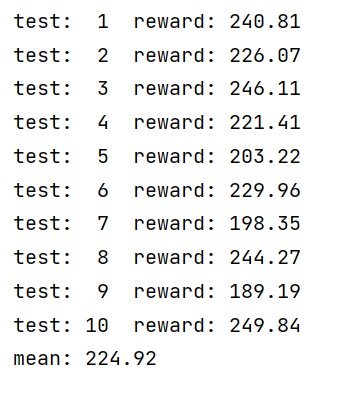
下面两图分别是探索噪声取0.1和0.01是对应的学习曲线,可以发现,探索噪声稍大时,会收敛更快,但波动较大,即不稳定。


测试效果如下:
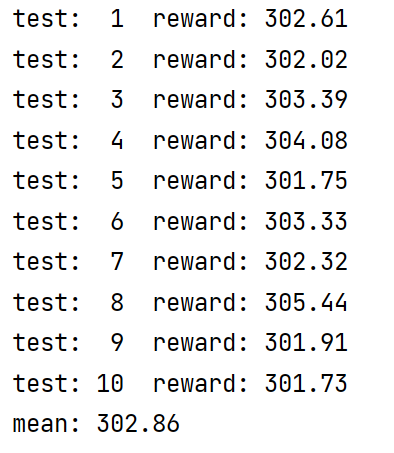
3.3 TD3 for BipedalWalker-v2
训练曲线及测试结果如下。

4. 个人理解
4.1 Q Learning到DQN
DQN是对表格型的Q Learning的扩展。Q Learing的核心是维护Q(s,a)这样的二维表,但当求解问题的状态空间S无穷多时,Q learning将不再有效,因为此时Q表的行数无穷大,无论是存储Q表还是更新Q表都不再可行。
DQN就是为了解决状态空间S高维或连续的问题。DQN使用神经网络来处理不同的状态,正如一个函数的输入可以是整个自变量的定义域。具体地,有两种实现,一种直接将s和a拼接起来输入神经网络,输出为一维的Q(s,a),另一种以s作为神经网络的输入,输出各个动作在该状态下的Q值,即输出|A|维。
4.2 DQN的各种版本
Naive DQN是最原始的DQN,对四元组(s, a, r, s’),其目标Q值的计算如下:
t
a
r
g
e
t
_
q
=
r
+
γ
∗
(
1
−
m
a
s
k
)
∗
m
a
x
a
′
Q
(
s
′
,
a
′
)
target\_q = r + \gamma*(1-mask) *\underset{a'}{max}\,Q(s', a')
target_q=r+γ∗(1−mask)∗a′maxQ(s′,a′)
Nature DQN引入了目标网络用于解决Naive DQN中存在的自举问题。“自举”,字面意思就是自己举自己,形象地描述了循环依赖的关系。在Naive DQN中,计算目标Q值时用到Q网络,而更新Q网络(参数)计算TD-error时又用到目标Q值,两者相互依赖,不利于Q网络收敛。为此,Nature DQN使用目标网络来拟合下一时刻状态s’对应的Q值,其目标Q值的计算如下:
t
a
r
g
e
t
_
q
=
r
+
γ
∗
(
1
−
m
a
s
k
)
∗
m
a
x
a
′
Q
t
a
r
g
e
t
(
s
′
,
a
′
)
target\_q = r + \gamma*(1-mask) *\underset{a'}{max} \,Q_{target}(s', a')
target_q=r+γ∗(1−mask)∗a′maxQtarget(s′,a′)目标Q网络的网络参数不需要迭代更新,而是每隔一段时间从当前Q网络Q复制过来(硬更新,区别策略梯度方法常用的软更新),即延时更新,这样可以减少目标Q值和当前的Q值相关性。
Nature DQN还有经验回放等trick,
Double DQN为了减缓Q值高估的问题。(为什么会高估,Q网络不是准确的,求max…)计算目标Q值时,无论是Naive DQN的
m
a
x
a
′
Q
(
s
′
,
a
′
)
\underset{a'}{max}\,Q(s', a')
a′maxQ(s′,a′),还是Double DQN的
m
a
x
a
′
Q
t
a
r
g
e
t
(
s
′
,
a
′
)
\underset{a'}{max}\,Q_{target}(s', a')
a′maxQtarget(s′,a′)由于max操作直接作用在
Q
t
a
r
g
e
t
Q_{target}
Qtarget上,会使目标Q值被过估计。为此,Double DQN将Nature DQN的目标Q值修改为:
t
a
r
g
e
t
_
q
=
r
+
γ
∗
(
1
−
m
a
s
k
)
∗
Q
t
a
r
g
e
t
(
s
′
,
a
r
g
m
a
x
a
′
Q
(
s
′
,
a
′
)
)
target\_q = r + \gamma*(1-mask) *Q_{target}(s',\underset{a'}{arg\,max} \,Q(s',a'))
target_q=r+γ∗(1−mask)∗Qtarget(s′,a′argmaxQ(s′,a′))很显然,相比于Nature DQN,
Q
t
a
r
g
e
t
(
s
′
,
a
r
g
m
a
x
a
′
Q
(
s
′
,
a
′
)
)
≤
m
a
x
a
′
Q
t
a
r
g
e
t
(
s
′
,
a
′
)
Q_{target}(s',\underset{a'}{arg\,max} \,Q(s',a'))\leq \underset{a'}{max}\,Q_{target}(s', a')
Qtarget(s′,a′argmaxQ(s′,a′))≤a′maxQtarget(s′,a′),故Double DQN能减缓目标Q值的过估计。
Dueling DQN
不同于Double DQN修改目标Q值的计算来优化DQN算法,Dueling DQN通过优化神经网络的结构来优化算法。优势函数定义为:
A
∗
(
s
,
a
)
=
Q
∗
(
s
,
a
)
−
V
∗
(
s
)
A^*(s,a)=Q^*(s,a)-V^*(s)
A∗(s,a)=Q∗(s,a)−V∗(s)
V
∗
(
s
)
V^*(s)
V∗(s)视作baseline,则
A
∗
(
s
,
a
)
A^*(s,a)
A∗(s,a)就是
Q
∗
(
s
,
a
)
Q^*(s,a)
Q∗(s,a)相对基线的优势。通过变换,Q值为
Q
∗
(
s
,
a
)
=
V
∗
(
s
)
+
A
∗
(
s
,
a
)
Q^*(s,a)=V^*(s)+A^*(s,a)
Q∗(s,a)=V∗(s)+A∗(s,a),为了解决不唯一性,使用如下的等价修改
Q
∗
(
s
,
a
)
=
V
∗
(
s
)
+
A
∗
(
s
,
a
)
−
A
∗
m
a
x
a
(
s
,
a
)
Q^*(s,a)=V^*(s)+A^*(s,a)-\underset{max \,a}{A^*}(s,a)
Q∗(s,a)=V∗(s)+A∗(s,a)−maxaA∗(s,a)因为
A
∗
m
a
x
a
(
s
,
a
)
=
Q
∗
m
a
x
a
(
s
,
a
)
−
V
∗
(
s
)
=
=
V
∗
(
s
)
−
V
∗
(
s
)
=
0
\underset{max \,a}{A^*}(s,a)=\underset{max \,a}{Q^*}(s,a)-V^*(s)==V^*(s)-V^*(s)=0
maxaA∗(s,a)=maxaQ∗(s,a)−V∗(s)==V∗(s)−V∗(s)=0,实际应用中使用mean代替max,即
Q
∗
(
s
,
a
)
=
V
∗
(
s
)
+
A
∗
(
s
,
a
)
−
A
∗
m
e
a
n
a
(
s
,
a
)
Q^*(s,a)=V^*(s)+A^*(s,a)-\underset{mean \,a}{A^*}(s,a)
Q∗(s,a)=V∗(s)+A∗(s,a)−meanaA∗(s,a)
此外,还有一些用于解决奖励稀疏问题的通用trick,例如优先经验回放 (Prioritized Experience Replay, PER)、事后经验回放 (Hindsight Experience Replay, HER) 等,由于它们独立于算法之外,是通用trick,而不属于某个具体算法例如DQN,故与普遍的做法不同,这里不将Prioritized Replay DQN视为DQN的一个算法版本。
rainbow
4.3 策略梯度算法
value-based与policy-based
上述的DQN及其变体都属于value-based算法,它们不直接拟合策略,而是拟合(估计)Q值,由Q值来间接地得到策略,例如 g r e e d y greedy greedy或 ϵ − g r e e d y \epsilon - greedy ϵ−greedy方法。
DQN这类value-based算法一般只能处理离散动作,无法处理连续动作(虽然可以连续动作离散化),因为由Q值(间接)得到动作时,需要对状态s对应的所有动作的Q值进行比较,选取Q值最大的动作,即 a r g m a x a Q ( s , a ) \underset{a}{argmax}\,Q(s,a) aargmaxQ(s,a),当动作连续或者有很高的维度时,max操作将没法进行。
当然value-based方法还有一些其他的缺陷,像不能很好地处理多模态的最优动作,例如最优策略是随机策略。
而另一类policy-based的策略梯度方法直接拟合策略,以状态或观测作为输入,输出各个动作的概率
π
θ
(
s
,
a
)
\pi_\theta(s,a)
πθ(s,a) ( Stochastic Policy Gradient, SPG)或输出最优动作
u
θ
(
s
)
u_\theta(s)
uθ(s) (Deterministic Policy Gradient, DPG)。
显然,DPG可以解决连续型动作,因为其不依赖动作的维度。
4.4 Actor-Critic架构
value-based和policy-based相结合的AC结构在model free RL中相当流行,很多经典高效的算法采用AC结构,例如DDPG及其改进版TD3、SAC等。
在AC结构中,Actor网络负责由状态选择动作,Critic负责对Actor的决策进行评价。Actor网络的更新采用policy-based方式,即梯度上升,只不过其Q(s,a)由Critic网络输出;Critic一般使用类似DQN中的TD-error更新。
注意,为了能够处理连续型动作,Critic网络的输入得是cat(s,a),而不能像DQN那样,可以仅输入s,而输出各个动作对应的Q值。















 1469
1469











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









