







 (1)旋转运动学(2)IMU测量模型和运动模型(3)IMU误差模型(4)运动模型离散时间处理。IMU离散测量模型,欧拉角速度和机体角速度的转换,PVQ应用中值积分和欧拉积分,六面法标定加速计。ALLAN方差估计
(1)旋转运动学(2)IMU测量模型和运动模型(3)IMU误差模型(4)运动模型离散时间处理。IMU离散测量模型,欧拉角速度和机体角速度的转换,PVQ应用中值积分和欧拉积分,六面法标定加速计。ALLAN方差估计
一. 大纲
(1)旋转运动学
(2)IMU测量模型和运动模型
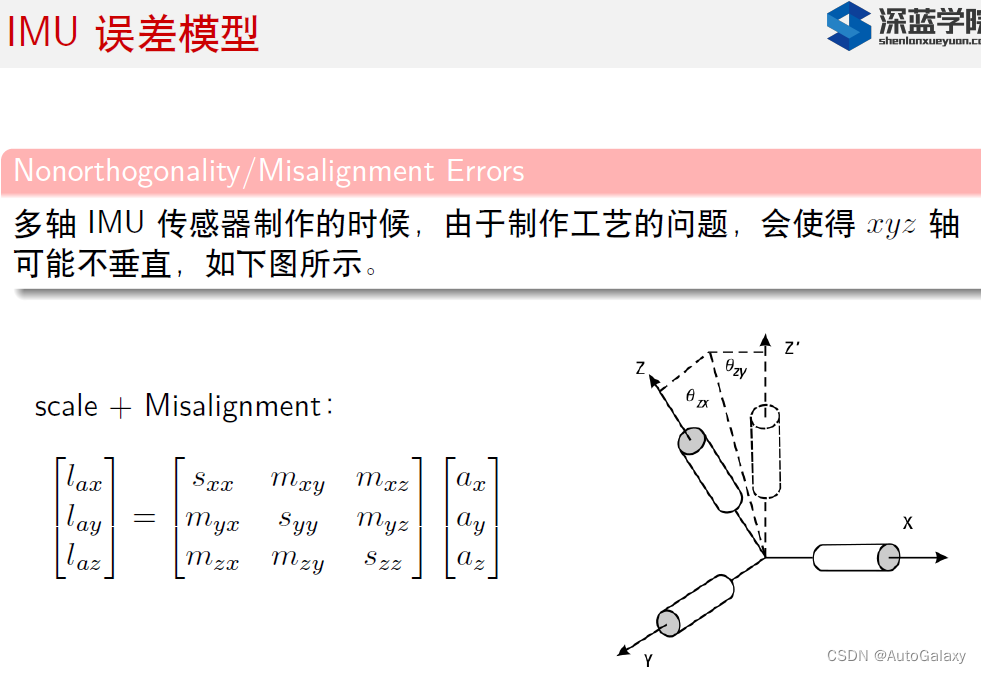
(3)IMU误差模型
(4)运动模型离散时间处理
二. 测量模型和运动模型见下网址
VIO----相关公式解释说明_AutoGalaxy的博客-CSDN博客
三. IMU误差模型
3.1 误差分类
(1)确定性误差、随机误差
(2)确定性误差可以事先标定得:bias,scale
(3)随机误差通常假设噪声服从高斯分布:高斯白噪声,bias随机游走
3.2 确定性误差

3.3 进而得出IMU误差模型
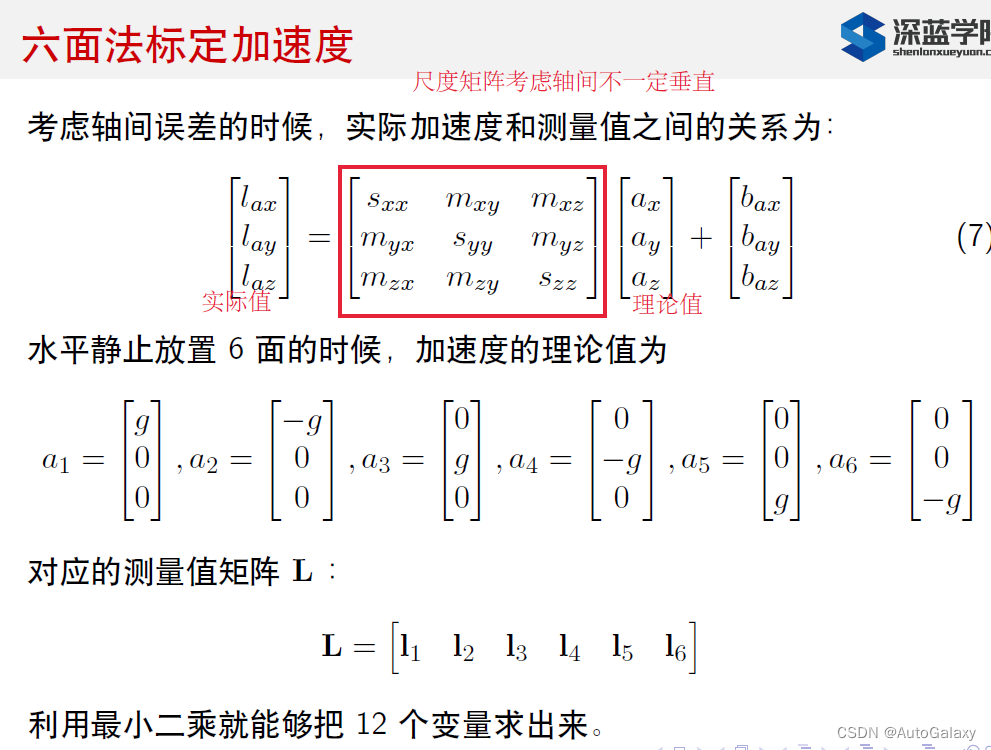
3.4 六面法标定加速度和六面法标定陀螺仪(这里的加速度标定比较实用)


 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 326
326











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









