
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
Mat frame, gray;
Mat prev_frame, prev_gray;
vector<Point2f> features;
vector<Point2f> iniPoints;
vector<Point2f> fpts[2];
vector<uchar> status;
vector<float> errors;
void drawFeature(Mat& inFrame);
void detectFeatures(Mat& inFrame, Mat& ingray);
void klTrackFeature();
void drawTrackLines();
int main(int argc, char** argv) {
VideoCapture capture;
capture.open("bike.avi");
if (!capture.isOpened()) {
printf("could not load video file...\n");
return -1;
}
namedWindow("camera input", 0);
while (capture.read(frame))
{
cvtColor(frame, gray, COLOR_BGR2GRAY);
if (fpts[0].size() < 40)
{
detectFeatures(frame, gray);
fpts[0].insert(fpts[0].end(), features.begin(), features.end());
iniPoints.insert(iniPoints.end(), features.begin(), features.end());
}
else
{
printf("没有检测,持续追踪...\n");
}
if (prev_gray.empty())
{
gray.copyTo(prev_gray);
}
klTrackFeature();
gray.copyTo(prev_gray);
frame.copyTo(prev_frame);
imshow("camera input", frame);
char c = waitKey(50);
if (c == 27) {
break;
}
}
waitKey(0);
return 0;
}
void detectFeatures(Mat& inFrame, Mat& ingray) {
double maxCorners = 500;
double qualitylevel = 0.01;
double minDistance = 10;
double blockSize = 3;
double k = 0.04;
goodFeaturesToTrack(ingray, features, maxCorners, qualitylevel, minDistance, noArray(), blockSize, false, k);
cout << "detect features : " << features.size() << endl;
}
void klTrackFeature() {
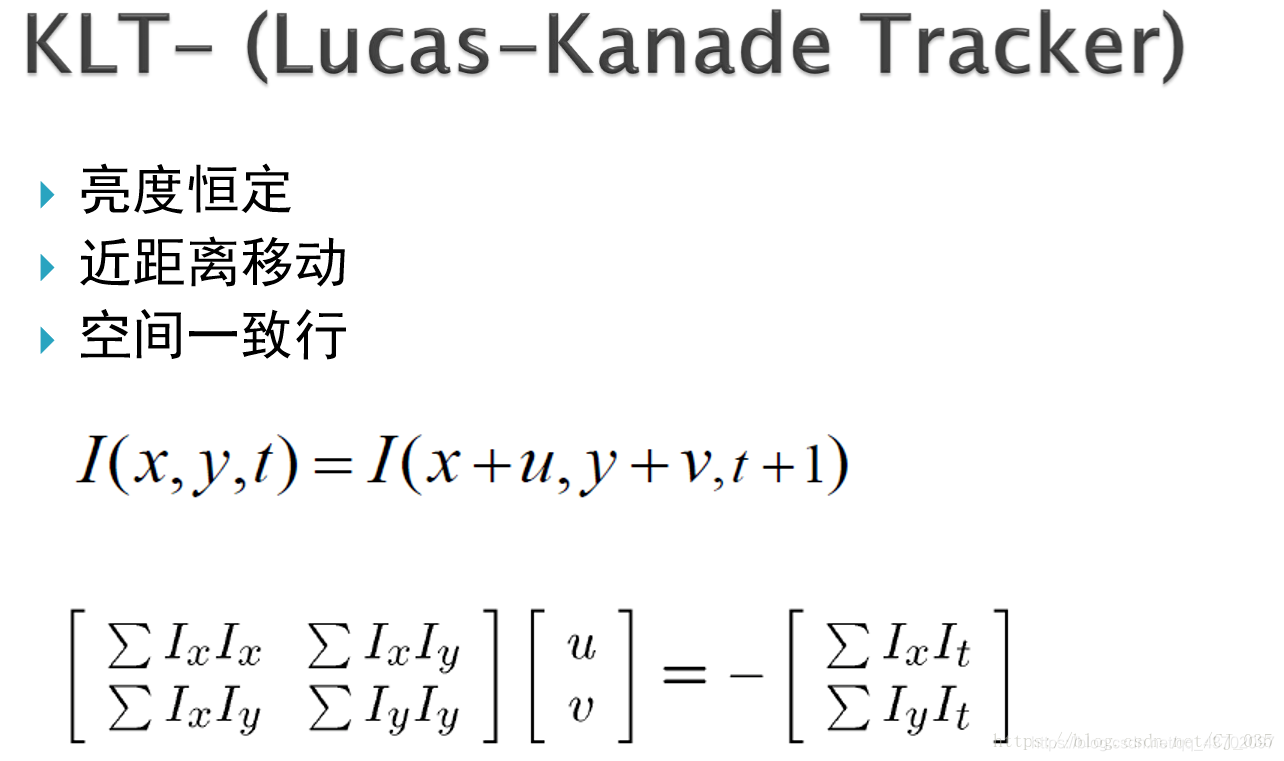
calcOpticalFlowPyrLK(prev_gray, gray, fpts[0], fpts[1], status, errors);
int k = 0;
for (int i = 0; i < fpts[1].size(); i++) {
double dist = abs(fpts[0][i].x - fpts[1][i].x) + abs(fpts[0][i].y - fpts[1][i].y);
if (dist > 2 && status[i]) {
iniPoints[k] = iniPoints[i];
fpts[1][k++] = fpts[1][i];
}
}
iniPoints.resize(k);
fpts[1].resize(k);
drawTrackLines();
swap(fpts[1], fpts[0]);
}
void drawTrackLines() {
for (size_t t = 0; t < fpts[1].size(); t++) {
line(frame, iniPoints[t], fpts[1][t], Scalar(0, 255, 0), 1, 8, 0);
circle(frame, fpts[1][t], 2, Scalar(0, 0, 255), 2, 8, 0);
}
}






















 5124
5124











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









