







文章目录
一、软件:手机下载“蓝牙串口”,电脑下载“XCOM串口调试助手”
- 手机应用商店下载 蓝牙串口(HC-05只支持Android)
- 电脑端下载 XCOM串口调试助手
点击此处下载
需要登录才能下载!这是正点原子官网,请放心登录下载。

二、硬件:HC-05模块,USB转TTL模块,51小车
1. HC-05
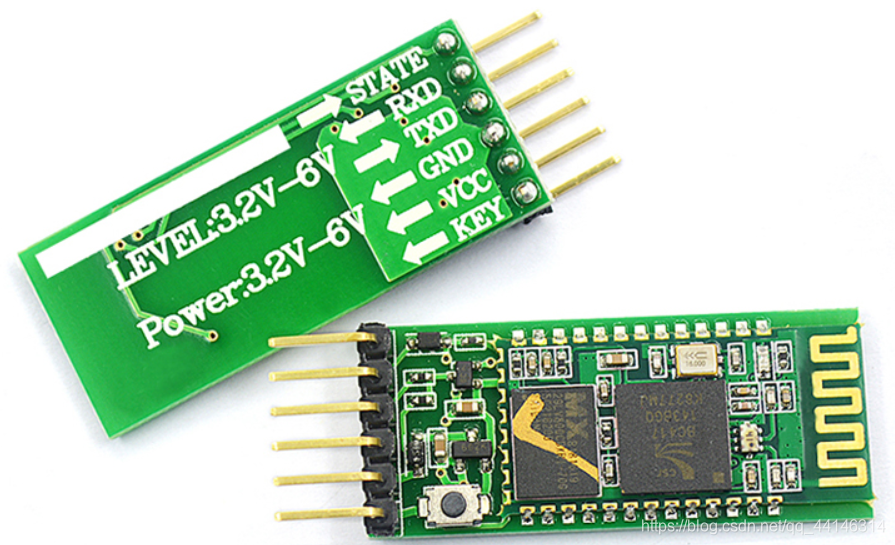
- 工作电压:3.3V
- 参考距离:10m
- 通讯接口:UART 3.3V TTL电平
- 通信方式:配对成功后,可以作为全双工串口使用,无需了解任何蓝牙协议。
- 默认常用通讯格式:9600,1,N(AT指令可设置停止位为2,奇或偶效验)
- 默认值:从机,波特率9600,蓝牙名HC-05,配对密码1234,LED状态灯开启。
- 主从机设置:模块为主从一体,出厂默认为从机,可以通过AT指令切换成主机。
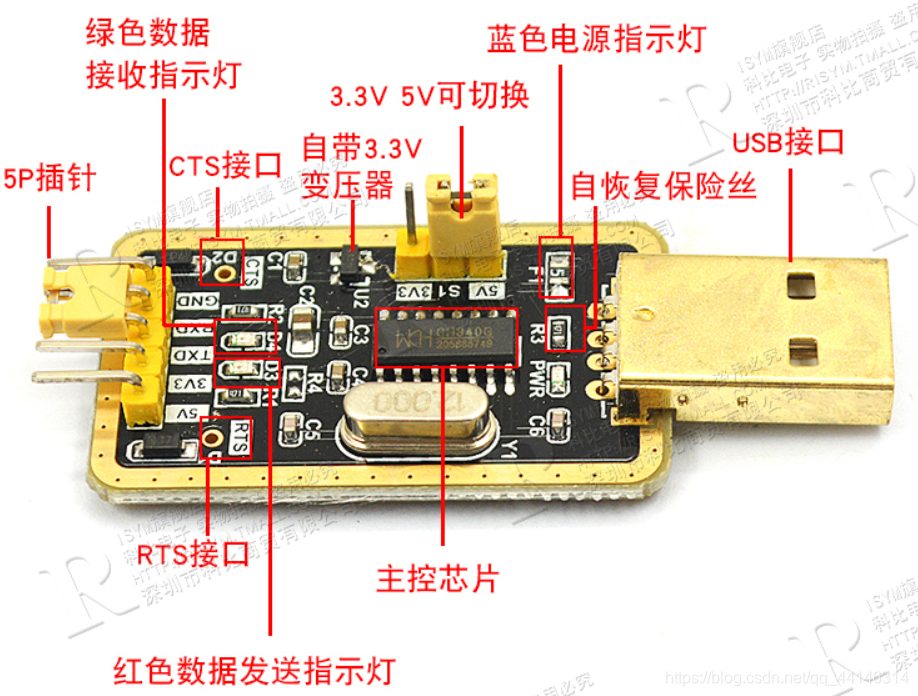
2、USB转TTL模块
三、调试
1. 引脚连接
USB转TTL模块 ~~~~ HC-05模块
RXD ~~~~~~~~~~~ TXD
TXD ~~~~~~~~~~~ RXD
VCC ~~~~~~~~~~~ VCC(3.3V)
GND ~~~~~~~~~~~ GND
- 注意 RXD 连接 TXD
- 注意 如果是用笔记本电脑调试,电脑要接电源,否则电压不够,蓝牙模块不亮
2. 进入AT模式
- 先打开XCOM串口调试助手
选用下述第一种方法进入AT模式(进入AT模式就是为了设置和得到HC-05蓝牙模块的参数。)
此时HC-05模块上的灯慢闪,按下图上的标示操作。
- 进入AT模式的方法有两种:
- 在模块上电之前,把KEY脚设置成高电平,然后将USB接口插入电脑 (即长按模块唯一一个按键,USB接口插入电脑后再松开)。此时LED慢闪(2s一次),模块进入AT模式,波特率固定为38400。此模式我们叫原始模式,原始模式下一直处于AT命令模式状态。
- 在模块上电之后,此时LED快闪(1s两次),发送一次AT指令,需要按一次按键,模块也会进入AT模式,此时LED依旧快闪,波特率为默认波特率9600。此模式我们叫正常模式。正常模式下只有按住按键才处于AT命令模式状态。
推荐使用第一种方法。
-
HC-05 AT常用指令集
- 查看是否处于AT模式:AT\n
返回:OK - 询问、设置蓝牙名称:AT+NAME / AT+NAME=OXOXO \n
返回:+NAME:OXOXO OK - 询问、设置蓝牙密码:AT+PSWD / AT+PSWD=“0000” \n
返回:+PSWD:0000 OK
(密码要有双引号,密码是四位数字) - 询问、设置 波特率、停止位和校验位:AT+UART / AT+UART=0000,0,0 \n
返回:+UART:0000,0,0 OK
(0无校验位,1奇校验位,2偶校验位) - 恢复默认设置:AT+ORGL\n
返回:OK
输入的指令必须以回车作为结尾!(\n即回车、换行,在串口调试助手上输入一个回车即可)
一般只需要查询参数,不需要设置,使用默认设置就OK。 - 查看是否处于AT模式:AT\n
3. 手机端串口助手的调试
-
手机与电脑通信测试
手机蓝牙连接HC-05蓝牙模块需要使HC-05处于正常模式(波特率为9600)。即将USB转TTL模块从电脑拔下,然后直接插回电脑。测试能否正常通信。
手机连接上HC-05蓝牙模块的时候,蓝牙模块慢闪若此步骤正常,则进入下一步。
-
在手机端蓝牙串口app上设置键盘
上图只给了前进按钮的设置,类似的完成剩下四个按键的设置。注意每个按键的松开状态都应该为停车t。
此处按钮的设置应该与代码匹配,结合下面代码,前进、后退、左转、右转、停止分别为q、h、z、y、t。 为避免手机与小车通讯异常,经测试,只发送一个字母比较稳定 -
至此,完成了所有软件调试和设置。
4. HC-05与51单片机的接口连接
HC-05蓝牙模块与51单片机的接口连接 和 HC-05蓝牙模块与USB转TTL模块的接口连接相同。
注意 RXD 连接 TXD!
硬件连接好后,打开单片机电源,手机连接上HC-05蓝牙模块(灯慢闪),然后按动设置好的按钮,秀出你的操作!
四、代码
蓝牙遥控小车需要用到串口通信和定时器中断的内容。
HC-05蓝牙模块与51单片机的接口连接 和 HC-05蓝牙模块与USB转TTL模块的接口连接相同。
代码中设置的波特率需要与蓝牙波特率相同才可以通信,为9600。
#include <reg52.h>
typedef unsigned char u8;
typedef unsigned int u16;
sbit ENA=P0^0; //小车电机引脚
sbit IN1=P0^1;
sbit IN2=P0^2;
sbit IN3=P0^3;
sbit IN4=P0^4;
sbit ENB=P0^5;
sbit ENC=P1^0;
sbit IN5=P1^1;
sbit IN6=P1^2;
sbit IN7=P1^3;
sbit IN8=P1^4;
sbit END=P1^5;
sbit Data=P3^1; //接受数据的引脚,即TXD脚
void receive(u8 m);
void run();
void stop();
void turn_left();
void turn_right();
void back();
void UartConfigurationInit(){
SCON=0X50; //设置为工作方式1
TMOD=0x20; //设置定时器1工作方式为方式2
TH1=0xfd; //波特率9600
TL1=0xfd;
TR1=1; //启动定时器1
SM0=0;SM1=1; //串口方式1
REN=1; //允许接收
PCON=0x00; //关倍频
ES=1; //开串口中断
EA=1; //开总中断
TR1=1;
}
void main(){
UartConfigurationInit();
stop();
while(1);
}
void receive(u8 m){
switch(m){
case 'q': //前进
run();
break;
case 'y': //右转
turn_right();
break;
case 'z': //左转
turn_left();
break;
case 'h': //后退
back();
break;
case 't': //停止
stop();
break;
}
}
void run(){
IN1=1; IN2=0; IN3=1; IN4=0; IN5=1; IN6=0; IN7=1; IN8=0; ENA=1; ENB=1; ENC=1; END=1;
}
void stop(){
IN1=0; IN2=0; IN3=0; IN4=0; IN5=0; IN6=0; IN7=0; IN8=0;
}
void turn_left(){
IN1=0; IN2=1; IN3=1; IN4=0; IN5=0; IN6=1; IN7=1; IN8=0;
}
void turn_right(){
IN1=1; IN2=0; IN3=0; IN4=1; IN5=1; IN6=0; IN7=0; IN8=1;
}
void back(){
IN1=0; IN2=1; IN3=0; IN4=1; IN5=0; IN6=1; IN7=0; IN8=1; ENA=1; ENB=1; ENC=1; END=1;
}
void Usart() interrupt 4 //中断函数
{
u8 receiveData;
receiveData=SBUF; //出去接收到的数据
receive(receiveData);
RI = 0; //清除接收中断标志位
SBUF=receiveData; //将接收到的数据放入到发送寄存器
while(!TI); //等待发送数据完成
TI=0; //清除发送完成标志位
}















 5417
5417











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









