








视觉SLAM十四讲----ch5的实践操作及避坑
一、实践操作前的准备工作
-
安装OpenCV
Ubuntu18参考:Ubuntu 18.04下opencv4安装及C++配置
Ubuntu20参考:Ubuntu 20.04搭建OpenCV 4.5.0 & C++环境
说明: OpenCV提供了大量的开源图像算法,是计算机视觉中使用极广的图像处理算法库。
注意: 不同的OpenCV版本可能有不同的语句,到时候进行更改即可。 -
在终端中进入ch5文件夹下,顺序执行以下命令进行编译。
mkdir build
cd build
cmake ..
//注意,j4还是其他主要看自己的电脑情况
make -j4
- 在build文件中执行。
二、各个实践操作
1.计算机中的图像
- OpenCV的基本使用方法——操作OpenCV图像
在build中进入 imageBasics
执行语句:(这里也可以直接在文件中更改语句,进行图片固定位置获取)
./imageBasics /home/fighter/slam/slambook2/ch5/imageBasics/ubuntu.png
执行后结果:

首先弹出第一个图片,按任意键弹出第二个图片,接着按任意键,同时出现3和4。
在弹出图片的同时,终端输出以下内容:
图像宽为1200,高为674,通道数为3
遍历图像用时:1e-07 秒。
- 图像去畸变
在build中进入 imageBasics,注意更改undistortImage.cpp中图片文件的路径。改完之后记得去build下进行make编译。
执行语句:./undistortImage
执行结果:

2.3D视觉
-
双目视觉
在build中进入 stereo,注意更改stereoVision.cpp中图片文件的路径。改完之后记得去build下进行make编译。
执行语句:./stereoVision
执行结果:
(1)左眼图像
 (2)右眼图像
(2)右眼图像
(3)SGBM的视差图(因为有一部分左眼看到了但是右眼没看到,所以对应的视察是空的)

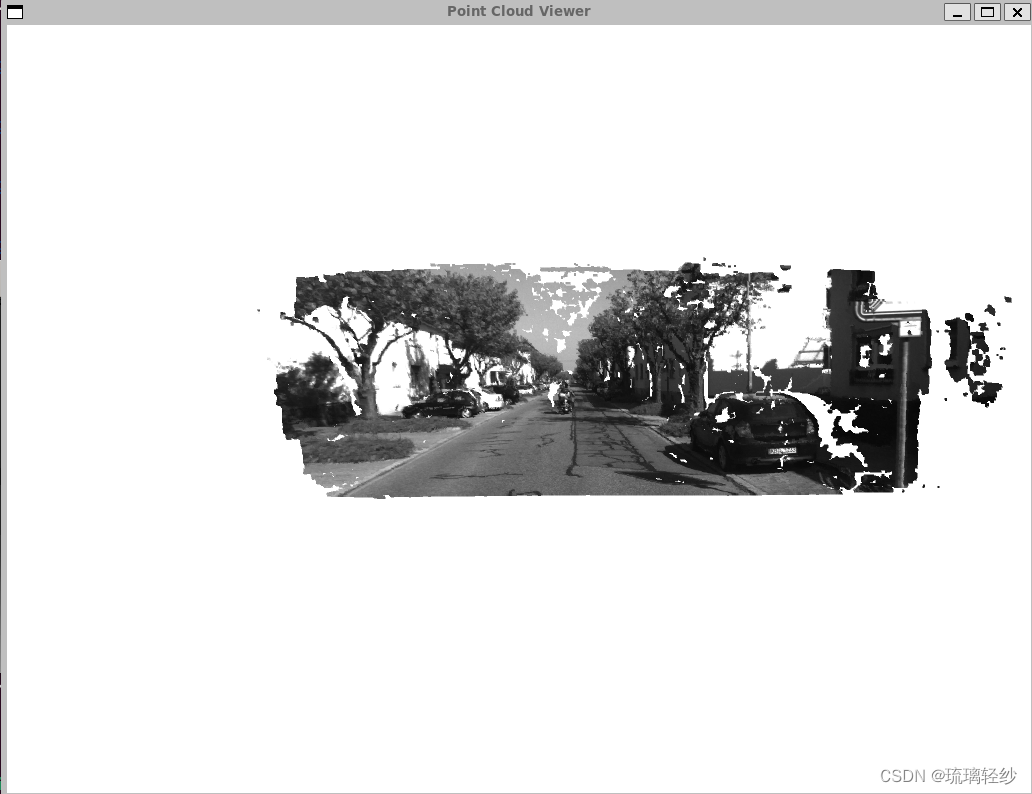
(4)点云图
-
RGB-D视觉
在build中进入 stereo,注意更改joinMap.cpp中图片文件的路径。
将21-30行代码改为如下所示。注意:路径需要改成自己的!!!改完之后记得去build下进行make编译。
ifstream fin("/home/fighter/slam/slambook2/ch5/rgbd/pose.txt");
if (!fin) {
cerr << "请在有pose.txt的目录下运行此程序" << endl;
return 1;
}
for (int i = 0; i < 5; i++) {
boost::format fmt("/home/fighter/slam/slambook2/ch5/rgbd/%s/%d.%s"); //图像文件格式
colorImgs.push_back(cv::imread((fmt % "color" % (i + 1) % "png").str()));
depthImgs.push_back(cv::imread((fmt % "depth" % (i + 1) % "pgm").str(), -1)); // 使用-1读取原始图像
执行语句:./joinMap
执行结果:
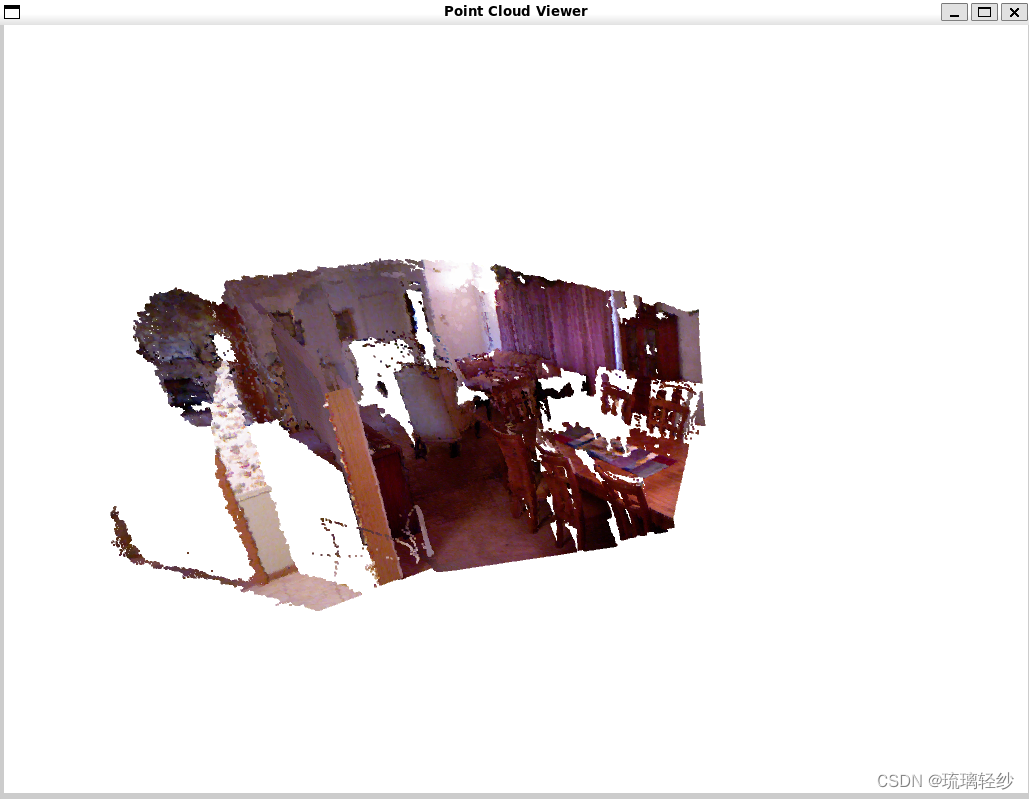
同时,终端会输出:
转换图像中: 1
转换图像中: 2
转换图像中: 3
转换图像中: 4
转换图像中: 5
点云共有1081843个点.
三、遇到的问题
- 问题:执行cmake时,出现下图所示错误:
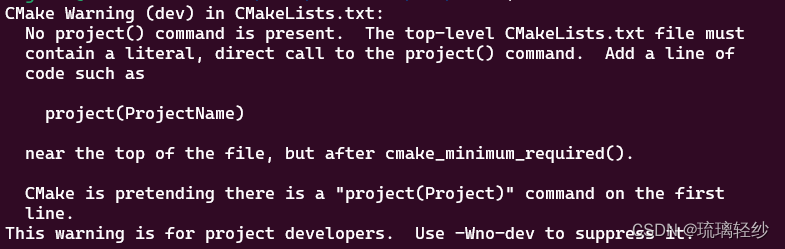
解决办法:这只是一个警告,通过观察,我们可以看到他只是一个针对项目开发人员的警告。在这里有两种处理办法。
- 直接不管,这里不会造成任何影响
- 在工作空间中的CMakeLists.txt文件中,根据警告提示在第二行加入project(chapter5) ,括号的内容在此实践中可以任意填写。















 5363
5363











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









