







1.在common.py文件最后面添加下面代码
class ConvAWS2d(nn.Conv2d):
def __init__(self,
in_channels,
out_channels,
kernel_size,
stride=1,
padding=0,
dilation=1,
groups=1,
bias=True):
super().__init__(
in_channels,
out_channels,
kernel_size,
stride=stride,
padding=padding,
dilation=dilation,
groups=groups,
bias=bias)
self.register_buffer('weight_gamma', torch.ones(self.out_channels, 1, 1, 1))
self.register_buffer('weight_beta', torch.zeros(self.out_channels, 1, 1, 1))
def _get_weight(self, weight):
weight_mean = weight.mean(dim=1, keepdim=True).mean(dim=2,
keepdim=True).mean(dim=3, keepdim=True)
weight = weight - weight_mean
std = torch.sqrt(weight.view(weight.size(0), -1).var(dim=1) + 1e-5).view(-1, 1, 1, 1)
weight = weight / std
weight = self.weight_gamma * weight + self.weight_beta
return weight
def forward(self, x):
weight = self._get_weight(self.weight)
return super()._conv_forward(x, weight, None)
def _load_from_state_dict(self, state_dict, prefix, local_metadata, strict,
missing_keys, unexpected_keys, error_msgs):
self.weight_gamma.data.fill_(-1)
super()._load_from_state_dict(state_dict, prefix, local_metadata, strict,
missing_keys, unexpected_keys, error_msgs)
if self.weight_gamma.data.mean() > 0:
return
weight = self.weight.data
weight_mean = weight.data.mean(dim=1, keepdim=True).mean(dim=2,
keepdim=True).mean(dim=3, keepdim=True)
self.weight_beta.data.copy_(weight_mean)
std = torch.sqrt(weight.view(weight.size(0), -1).var(dim=1) + 1e-5).view(-1, 1, 1, 1)
self.weight_gamma.data.copy_(std)
class SAConv2d(ConvAWS2d):
def __init__(self,
in_channels,
out_channels,
kernel_size,
s=1,
p=None,
g=1,
d=1,
act=True,
bias=True):
super().__init__(
in_channels,
out_channels,
kernel_size,
stride=s,
padding=autopad(kernel_size, p, d),
dilation=d,
groups=g,
bias=bias)
self.switch = torch.nn.Conv2d(
self.in_channels,
1,
kernel_size=1,
stride=s,
bias=True)
self.switch.weight.data.fill_(0)
self.switch.bias.data.fill_(1)
self.weight_diff = torch.nn.Parameter(torch.Tensor(self.weight.size()))
self.weight_diff.data.zero_()
self.pre_context = torch.nn.Conv2d(
self.in_channels,
self.in_channels,
kernel_size=1,
bias=True)
self.pre_context.weight.data.fill_(0)
self.pre_context.bias.data.fill_(0)
self.post_context = torch.nn.Conv2d(
self.out_channels,
self.out_channels,
kernel_size=1,
bias=True)
self.post_context.weight.data.fill_(0)
self.post_context.bias.data.fill_(0)
self.bn = nn.BatchNorm2d(out_channels)
self.act = Conv.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity()
def forward(self, x):
# pre-context
avg_x = torch.nn.functional.adaptive_avg_pool2d(x, output_size=1)
avg_x = self.pre_context(avg_x)
avg_x = avg_x.expand_as(x)
x = x + avg_x
# switch
avg_x = torch.nn.functional.pad(x, pad=(2, 2, 2, 2), mode="reflect")
avg_x = torch.nn.functional.avg_pool2d(avg_x, kernel_size=5, stride=1, padding=0)
switch = self.switch(avg_x)
# sac
weight = self._get_weight(self.weight)
out_s = super()._conv_forward(x, weight, None)
ori_p = self.padding
ori_d = self.dilation
self.padding = tuple(3 * p for p in self.padding)
self.dilation = tuple(3 * d for d in self.dilation)
weight = weight + self.weight_diff
out_l = super()._conv_forward(x, weight, None)
out = switch * out_s + (1 - switch) * out_l
self.padding = ori_p
self.dilation = ori_d
# post-context
avg_x = torch.nn.functional.adaptive_avg_pool2d(out, output_size=1)
avg_x = self.post_context(avg_x)
avg_x = avg_x.expand_as(out)
out = out + avg_x
return self.act(self.bn(out))
class Bottleneck_SAC(nn.Module):
# Standard bottleneck
def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = SAConv2d(c_, c2, 3, 1, g=g)
self.add = shortcut and c1 == c2
def forward(self, x):
return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
class C3_SAC(C3):
# CSP Bottleneck with 3 convolutions
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__(c1, c2, n, shortcut, g, e)
c_ = int(c2 * e) # hidden channels
self.m = nn.Sequential(*(Bottleneck_SAC(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
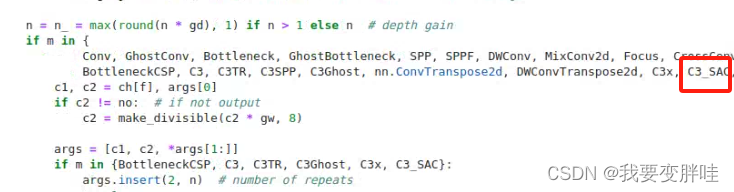
2.修改yolo.py文件
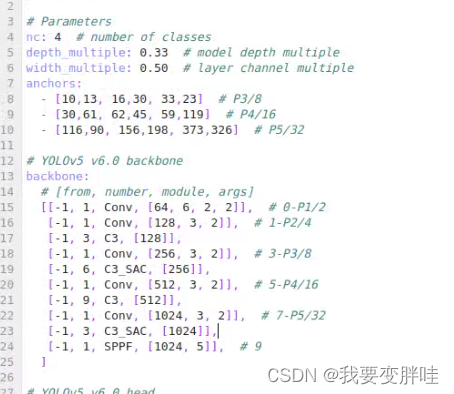
3.修改yolov5s.yaml文件
4.运行即可


















 698
698











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











