




一、MVS图像抓取
基本信息:
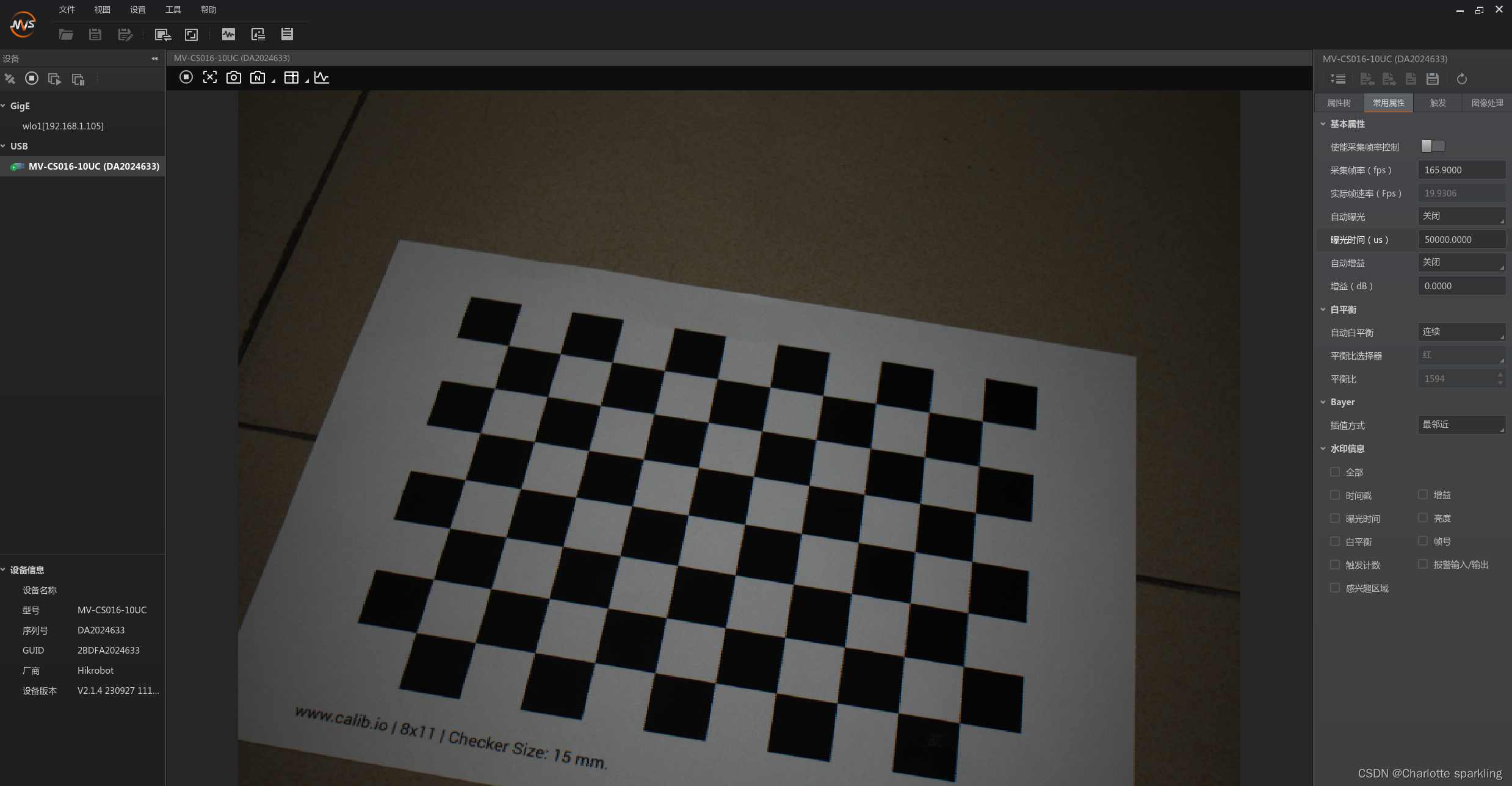
1、笔者使用的是海康机器人工业相机,型号MV-CS016-10UC,USB3.0,即插即用;
2、环境是ubuntu20.04
先打开mvs,相机基本参数配置如图所示,旋转标定板拍摄16张图片,调整好相机焦距和光圈大小,尽量保证图片清晰
(插一嘴,运行mvs方法:)
cd /opt/MVS/bin
./MVS
二、matlab camera calibrator工具箱
具体参照这篇博文使用matlab自带的标定工具箱:https://blog.csdn.net/lql0716/article/details/71973318
写的很全面,具体就不赘述了。最后得到标定参数,内参矩阵和径向畸变,对比下我的结果还是不错的。由于后续只是拿这个内参结果去解算位置,所以没有选用在vs或opencv环境里做标定,但是后续处理图像和解算姿态位置是肯定离不了的。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2934
2934





 到【灌水乐园】发言
到【灌水乐园】发言







