






1器械动态追踪的算法
1.1 寻找到这个程序
已经存放于压缩包中:
main.cpp的代码是
#include <opencv2/video/video.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/core/core.hpp>
#include <iostream>
#include <cstdio>
#include "stdafx.h"
#include <math.h>
using namespace std;
using namespace cv;
Mat frame, gray;//当前帧图片
Mat dst;
Mat prev_frame, prev_gray;//前一帧图片
vector<Point2f> features;//保存特征点
vector<Point2f> inPoints;//初始化特征点
vector<Point2f> fpts[2];//保存当前帧和前一帧的特征点位置 //定义一个一维数组,数组元素的类型是Point2f(2维点, 含xy,浮点类型)
vector<uchar> status;//特征点跟踪标志位
vector<float> err;//误差和
double pixel[550];
int k = 2;//定义optical_flow[k]的
double optical_flow[550];
int const maxCorners = 200;//特征点数量 = fpts[1].size()
double x, y, z;//存放第一帧的位置xy和矩形宽度z
Point2f pointA;//起始点
const double g_dReferWidth=2.3;//mm
double g_dPixelsPerMetric = 10;//每毫米多少像素
double distance1;
Scalar scalarL = Scalar(0, 25, 0);
Scalar scalarH = Scalar(26, 150, 255);
int flag_start = 0;//确定开始检测的flag
bool flag_firstframe = true;//确定开始检测第一帧的flag
bool flag_end = false;
void delectFeature(Mat &inFrame, Mat &ingray);//角点检测
//void drawFeature(Mat &inFrame);//画点
void track();//运动
void drawLine();//画运动轨迹
// Point2f midpoint(Point2f& ptA, Point2f& ptB);
void delectFirstFrame(Mat &frame, Mat &dst);
void delectFeature_single(Mat &inFrame,Mat &indst);
//void findContours(const Mat& src, vector<vector<Point>>& contours, vector<Vec4i>& hierarchy,//重载findContours
// int retr = RETR_LIST, int method = CHAIN_APPROX_SIMPLE, Point offset = Point(0, 0))//重载了findContours函数,防止运行结束时发生崩溃
//{
// //CvMat c_image = src;
// Mat c_image = src;
// MemStorage storage(cvCreateMemStorage());
// CvSeq* _ccontours = 0;
// //cvFindContours(&c_image, storage, &_ccontours, sizeof(CvContour), retr, method, CvPoint(offset));
// cvFindContours(&c_image, storage, &_ccontours, sizeof(CvContour), retr, method, Point(offset));
// if (!_ccontours)
// {
// contours.clear();
// return;
// }
// Seq<CvSeq*> all_contours(cvTreeToNodeSeq(_ccontours, sizeof(CvSeq), storage));
// int total = (int)all_contours.size();
// contours.resize(total);
//
// SeqIterator<CvSeq*> it = all_contours.begin();
// for (int i = 0; i < total; i++, ++it)
// {
// CvSeq* c = *it;
// ((CvContour*)c)->color = (int)i;
// int count = (int)c->total;
// int* data = new int[count * 2];
// cvCvtSeqToArray(c, data);
// for (int j = 0; j < count; j++)
// {
// contours[i].push_back(Point(data[j * 2], data[j * 2 + 1]));
// }
// delete[] data;
// }
//
// hierarchy.resize(total);
// it = all_contours.CV_THRESH_BINARY_INVbegin();
// for (int i = 0; i < total; i++, ++it)
// {
// CvSeq* c = *it;
// int h_next = c->h_next ? ((CvContour*)c->h_next)->color : -1;
// int h_prev = c->h_prev ? ((CvContour*)c->h_prev)->color : -1;
// int v_next = c->v_next ? ((CvContour*)c->v_next)->color : -1;
// int v_prev = c->v_prev ? ((CvContour*)c->v_prev)->color : -1;
// hierarchy[i] = Vec4i(h_next, h_prev, v_next, v_prev);
// }
// storage.release();
//}
//2022.9.24zaoshang
//Point2f midpoint(Point2f& ptA, Point2f& ptB) {
// return Point2f((ptA.x+ ptB.x)*0.5,(ptA.y + ptB.y)*0.5);
//}
//double length(Point2f& ptA, Point2f& ptB) {
// return sqrtf( powf((ptA.x - ptB.x), 2) + powf((ptA.y - ptB.y), 2) );
//}
Point2f midpoint(Point2f ptA, Point2f ptB) {
return Point2f((ptA.x+ ptB.x)*0.5,(ptA.y + ptB.y)*0.5);
}
double length(Point2f ptA, Point2f ptB) {
return sqrtf( powf((ptA.x - ptB.x), 2) + powf((ptA.y - ptB.y), 2) );
}
int main(){
//VideoCapture capture("/media/smile/Moving HHD 1.8T/佳豪师兄项目/3tjh01.mp4");
//VideoCapture capture("D:\\佳豪师兄项目\\3tjh.mp4");
VideoCapture capture("/media/smile/Moving HHD 1.8T/佳豪师兄项目/3.将vs2022_win10下的程序迁移到ubuntu下Qt5.9.2/1.将我之前在vs2022跑起来的程序在vs2022中转为qt文件并迁移到ubuntu下/1.成功在ubuntu-qt下运行的迁移程序/segmentation_only_qt/3tjhx0.5.mp4");
//J:\佳豪师兄项目\分割演示220815\光流法\新数据12.22
// VideoCapture capture(1);
//VideoCapture cap(0);
//VideoCapture capture("H:\ev_recode/20220813_163511.mp4");
//VideoCapture capture("D:/VSc++code/Vs2012code/实验数据1.5/4n.mp4");
/*获取视频帧的尺寸和帧率*/
// int CV_CAP_PROP_FPS;
// int CV_CAP_PROP_FRAME_WIDTH;
// int CV_CAP_PROP_FRAME_HEIGHT;
float CV_CAP_PROP_FPS,CV_CAP_PROP_FRAME_WIDTH,CV_CAP_PROP_FRAME_HEIGHT;
double rate = capture.get(CV_CAP_PROP_FPS);
int width = capture.get(CV_CAP_PROP_FRAME_WIDTH);
int height = capture.get(CV_CAP_PROP_FRAME_HEIGHT);
if (capture.isOpened())
{
while (capture.read(frame)) {
cvtColor(frame, gray, COLOR_BGR2GRAY);
delectFeature_single(frame,dst);
imshow("输CV_THRESH_BINARY_INV出视频", frame);//imshow("input video", frame);??
waitKey(30);
}
}
}
void delectFeature_single(Mat &frame, Mat &dst){
int largest_area=0;
int largest_contour_index=0;
int CV_THRESH_BINARY_INV;
Point2f pointO = Point2f(dst.size().width, dst.size().height);
Point2f pointB;
//颜色空间转换 dst=hsv
cvtColor(frame, dst, COLOR_BGR2HSV);
//Scalar scalarL = Scalar(0, 25, 48);0
//Scalar scalarH = Scalar(40, 145, 236);
//掩码mask=dst
inRange(dst, scalarL, scalarH, dst);
threshold(dst, dst, 160, 255, CV_THRESH_BINARY_INV);
//获取自定义核kernel 第一个参数MORPH_RECT表示矩形的卷积核
Mat kernel3 = getStructuringElement(MORPH_RECT, Size(1, 1));
Mat kernel2 = getStructuringElement(MORPH_RECT, Size(2, 2));
Mat kernel0 = getStructuringElement(MORPH_RECT, Size(3, 3));
Mat kernel = getStructuringElement(MORPH_RECT, Size(4, 4));
erode(dst, dst, kernel3);
dilate(dst, dst, kernel0);
//morphologyEx(dst, dst, MORPH_OPEN, kernel3);//MORPH_OPEN 开运算
//imshow("膨胀(+开运算)后", dst);
vector<vector<Point> > contours; // Vector for storing contours
vector<Vec4i> hierarchy;
findContours( dst, contours, hierarchy, RETR_CCOMP, CHAIN_APPROX_SIMPLE ); // Find the contours in the image RETR_CCOMP
Rect boundRect; //定义普通正外接矩形集合
vector<RotatedRect> box(contours.size()); //定义最小外接矩形集合
Point2f rect[4];
size_t i;
for( i = 0; i< contours.size(); i++ ) // iterate through each contour.
{
double area = contourArea( contours[i] ); // Find the area of contour
if( area > largest_area )
{
largest_area = area;
largest_contour_index = i; //Store the index of largest contour
//boundRect[i] = boundingRect(Mat(contours[i]));
boundRect = boundingRect( contours[i] ); // 普通的外界矩形轮廓
box[i] = minAreaRect(contours[i]); //计算轮廓最小外接矩形
box[i].points(rect);//把最小外接矩形四个顶点复制给rect
}
}
//cout<<"每一帧中的最大面积"<<largest_area<<endl;
//rectangle(frame, Point(boundRect.x, boundRect.y), Point(boundRect.x + boundRect.width, boundRect.y + boundRect.height), Scalar(255, 255, 255), 1, 8);//绘制一般的外接矩形
for (int j = 0; j < 4; j++)
{
line(frame, rect[j], rect[(j + 1) % 4], Scalar(0, 0, 255), 2, 8); //绘制最小外接矩形每条边
}
drawContours( frame, contours,largest_contour_index, Scalar( 0, 255, 0 ), 2 ); // 用之前的索引largest_contour_index绘制最大轮廓
//确定末端中点坐标
if(length(rect[0], rect[3])<length(rect[0], rect[1])){//此时短边为03或12
if(length(pointO, midpoint(rect[0], rect[3]))<length(pointO, midpoint(rect[1], rect[2]))){
pointB = midpoint(rect[0], rect[3]);//中点坐标
}else{
pointB = midpoint(rect[1], rect[2]);
}
}else{//此时短边为01或23
if(length(pointO, midpoint(rect[0], rect[1]))<length(pointO, midpoint(rect[2], rect[3]))){
pointB = midpoint(rect[0], rect[1]);//中点坐标
}else{
pointB = midpoint(rect[2], rect[3]);
}
}
// if(length(rect[0], rect[3])<length(rect[0], rect[1])){//此时短边为03或12
// if(length(pointO, midpoint(rect[0], rect[3]))<length(pointO, midpoint(rect[1], rect[2]))){
// pointB = midpoint(rect[0], rect[3]);//中点坐标
// }else{
// pointB = midpoint(rect[1], rect[2]);
// }
// }else{//此时短边为01或23
// if(length(pointO, midpoint(rect[0], rect[1]))<length(pointO, midpoint(rect[2], rect[3]))){
// pointB = midpoint(rect[0], rect[1]);//中点坐标
// }else{
// pointB = midpoint(rect[2], rect[3]);
// }
// }
//Point2f pointB = midpoint(rect[0], rect[3]);//中点坐标
circle( frame, pointB, 4, Scalar(255, 0, 0), -1);
//distance1 = sqrtf( powf((x - pointB.x), 2) + powf((y - pointB.y), 2) );
distance1 = sqrtf( powf((601 - pointB.x), 2) + powf((192 - pointB.y), 2) );
putText(frame, "The test is start:", Point(20, 10),FONT_HERSHEY_COMPLEX,0.5,Scalar(0,0,255));
putText(frame, cv::format("Device end point: X = %.0f pixels, Y = %.0f pixels", pointB.x, pointB.y), Point(20, 30),FONT_HERSHEY_COMPLEX,0.5,Scalar(0,0,255));
putText(frame, cv::format("The deformation is %.4f mm",-(distance1 / g_dPixelsPerMetric-130)), Point(20, 50),FONT_HERSHEY_COMPLEX,0.5,Scalar(0,0,255));
//if(distance1/g_dPixelsPerMetric > 40)
if ((110 > (distance1 / g_dPixelsPerMetric)) & ((distance1 / g_dPixelsPerMetric) > 100)) {
putText(frame, cv::format("Attention: Not Safe!!"), Point(20, 70),FONT_HERSHEY_COMPLEX,0.5,Scalar(0,0,255));
}
//line(frame, pointA, pointB, Scalar(0, 0, 255), 1, 8, 0);
circle( frame, pointA, 4, Scalar(0, 255, 0), -1);//起始点
//cout << "The deformation is"<<distance1/g_dPixelsPerMetric << " mm"<<endl;
}
1.2 只要将这部分放入您的主程序中
int main(){
VideoCapture capture("要进行识别的视频位置");
float CV_CAP_PROP_FPS,CV_CAP_PROP_FRAME_WIDTH,CV_CAP_PROP_FRAME_HEIGHT;
double rate = capture.get(CV_CAP_PROP_FPS);
int width = capture.get(CV_CAP_PROP_FRAME_WIDTH);
int height = capture.get(CV_CAP_PROP_FRAME_HEIGHT);
if (capture.isOpened())
{
while (capture.read(frame)) {
cvtColor(frame, gray, COLOR_BGR2GRAY);
delectFeature_single(frame,dst);
imshow("输CV_THRESH_BINARY_INV出视频", frame);//imshow("input video", frame);??
waitKey(30);
}
}
}
1.3 并且将其他部分放入您的主函数中;
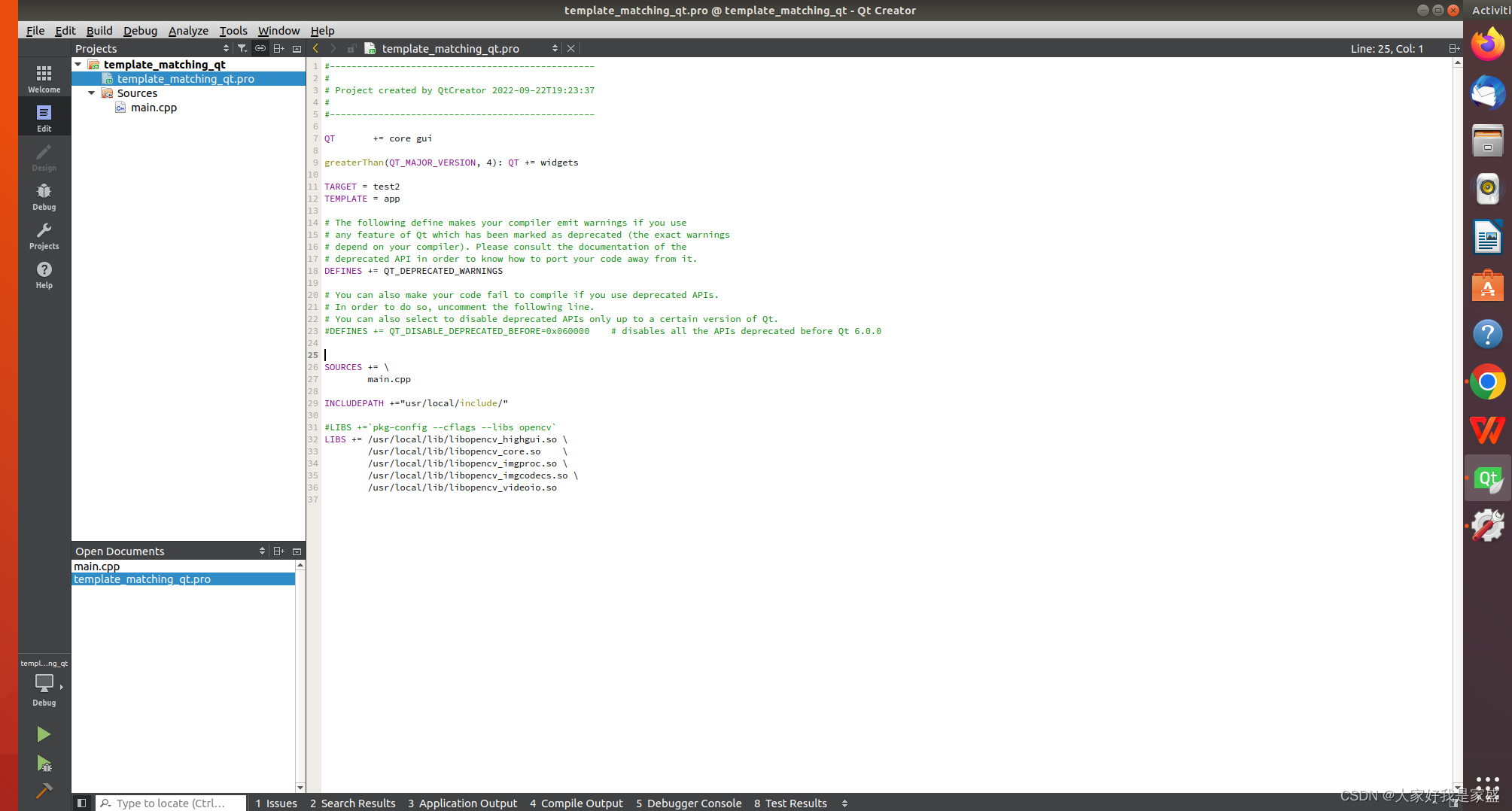
1.4将本工程文件中的.pro文件配置到您的qt工程文件的pro中
如果这些库的索引你没有配置,请配置一下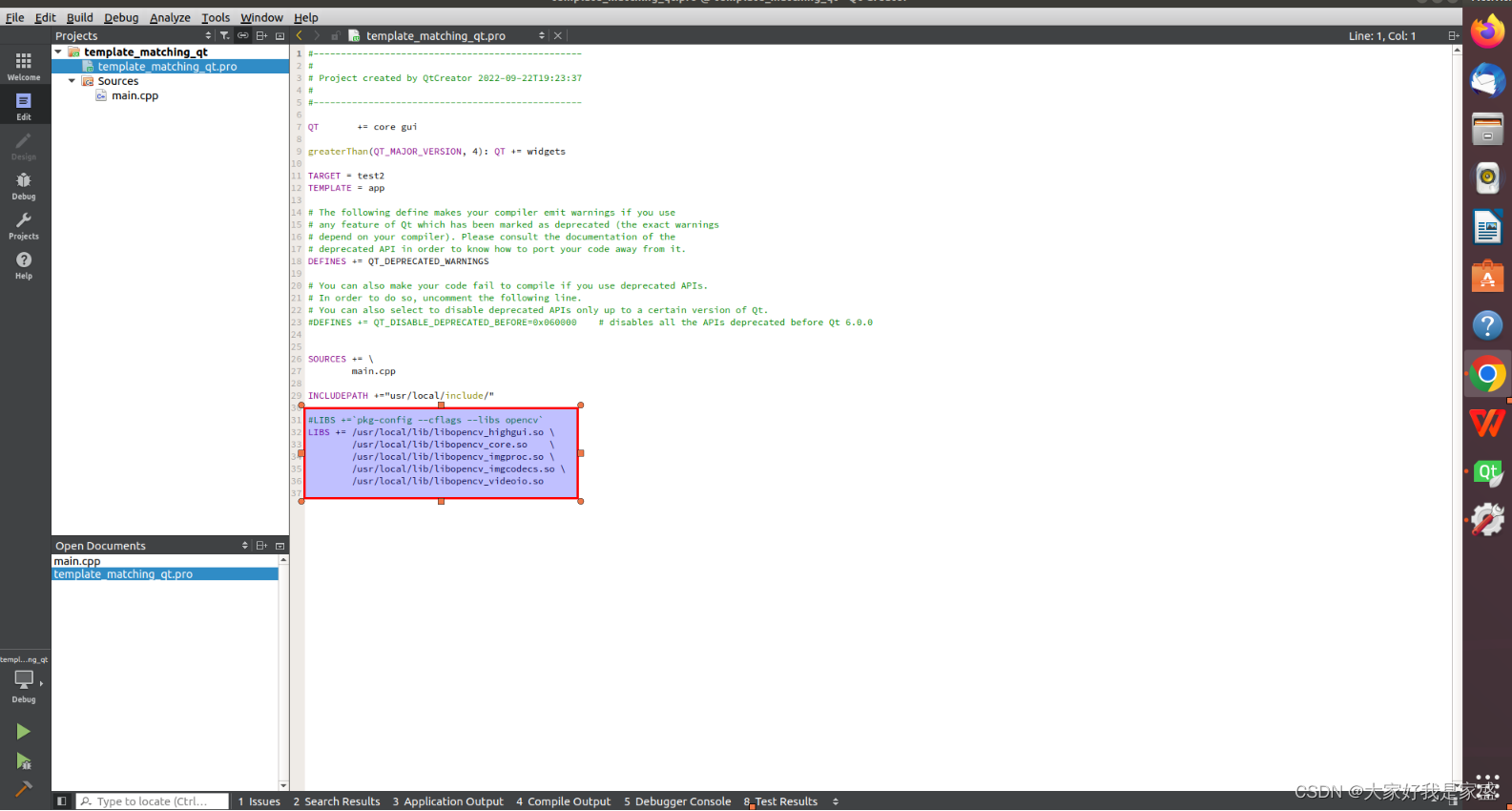
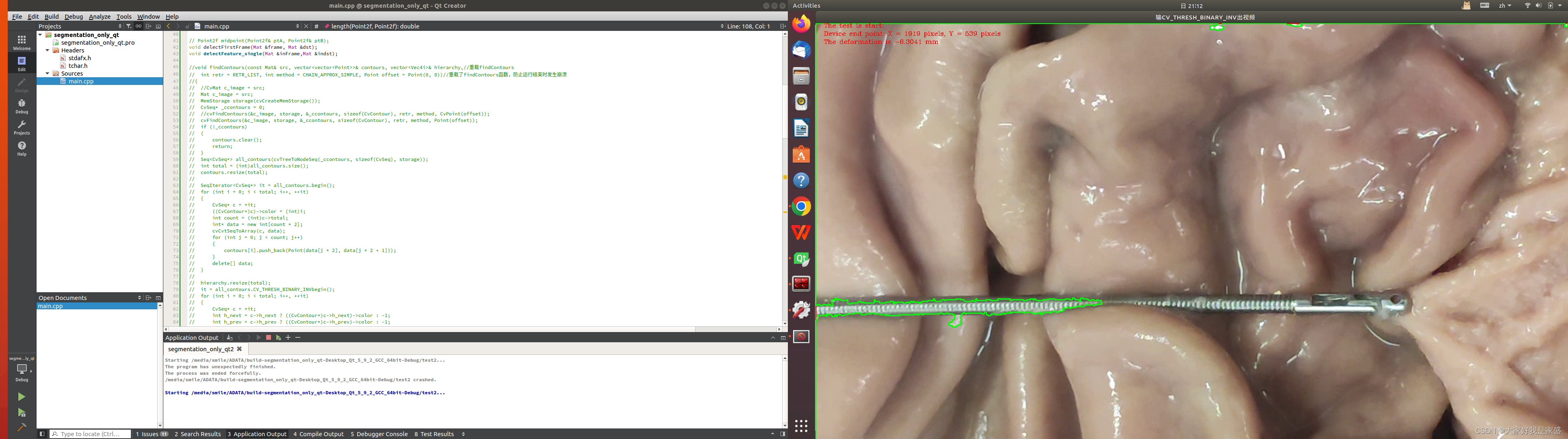
最后的效果
2器械识别的算法
2.1 寻找到这个程序
已经存放于压缩包中:

main.cpp的代码是
#include <opencv2/imgcodecs.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
#include <iostream>
using namespace std;
using namespace cv;
/// 全局变量
Mat img; Mat templ; Mat result;
//char* image_window = "Source Image";
//char* result_window = "Result window";
#define image_window "Source Image" //为窗口标题定义的宏
#define result_window "Result window" //为窗口标题定义的宏
int match_method;
int CV_TM_SQDIFF;
int CV_TM_SQDIFF_NORMED;
int CV_WINDOW_AUTOSIZE;
int max_Trackbar = 5;
/// 函数声明
// 模板匹配
void MatchingMethod(int, void*)
{
// 用于显示结果
Mat img_display;
img.copyTo(img_display);//img_display=img
// 用于存储匹配结果的矩阵
int result_cols = img.cols - templ.cols + 1;
int result_rows = img.rows - templ.rows + 1;
result.create(result_cols, result_rows, CV_32FC1);
// 进行模板匹配
matchTemplate(img, templ, result, match_method);
// 归一化结果(方便显示结果)
normalize(result, result, 0, 1, NORM_MINMAX, -1, Mat());
// 找到最佳匹配位置
double minVal;
double maxVal;
Point minLoc;
Point maxLoc;
Point matchLoc;
minMaxLoc(result, &minVal, &maxVal, &minLoc, &maxLoc, Mat()); // 寻找result中的最大和最小值,以及它们所处的像素位置
// 使用SQDIFF和SQDIFF_NORMED方法时:值越小代表越相似
// 使用其他方法时:值越大代表越相似
if (match_method == CV_TM_SQDIFF || match_method == CV_TM_SQDIFF_NORMED)
{
matchLoc = minLoc;
}
else
{
matchLoc = maxLoc;
}
// 显示匹配结果
rectangle(img_display, matchLoc, Point(matchLoc.x + templ.cols, matchLoc.y + templ.rows), Scalar::all(0), 2, 8, 0);
rectangle(result, matchLoc, Point(matchLoc.x + templ.cols, matchLoc.y + templ.rows), Scalar::all(0), 2, 8, 0);
imshow(image_window, img_display);
imshow(result_window, result);
}
int main(int argc, char** argv)
{
string path = "/media/smile/ADATA/template_matching_qt/演示.mp4";
VideoCapture capture(path);
//VideoCapture capture(0);
templ = imread("/media/smile/ADATA/template_matching_qt/4.jpg"); //目标图像
while (1)
{
// 读图片
capture >> img;
// 创建图像显示窗口
namedWindow(image_window, CV_WINDOW_AUTOSIZE);
namedWindow(result_window, CV_WINDOW_AUTOSIZE);
// 创建混动条
char trackbar_label[109] = "Method: \n 0: SQDIFF \n 1: SQDIFF NORMED \n 2: TM CCORR \n 3: TM CCORR NORMED \n 4: TM COEFF \n 5: TM COEFF NORMED";
// char* trackbar_label = "Method: \n 0: SQDIFF \n 1: SQDIFF NORMED \n 2: TM CCORR \n 3: TM CCORR NORMED \n 4: TM COEFF \n 5: TM COEFF NORMED";
createTrackbar(trackbar_label, image_window, &match_method, max_Trackbar, MatchingMethod);
MatchingMethod(0, 0);
waitKey(1);
}
return 0;
}
2.2 寻只要将这部分放入您的主程序中
int main(int argc, char** argv)
{
string path = "/media/smile/ADATA/template_matching_qt/演示.mp4";
VideoCapture capture(path);
//VideoCapture capture(0);
templ = imread("/media/smile/ADATA/template_matching_qt/4.jpg"); //目标图像
while (1)
{
// 读图片
capture >> img;
// 创建图像显示窗口
namedWindow(image_window, CV_WINDOW_AUTOSIZE);
namedWindow(result_window, CV_WINDOW_AUTOSIZE);
// 创建混动条
char trackbar_label[109] = "Method: \n 0: SQDIFF \n 1: SQDIFF NORMED \n 2: TM CCORR \n 3: TM CCORR NORMED \n 4: TM COEFF \n 5: TM COEFF NORMED";
// char* trackbar_label = "Method: \n 0: SQDIFF \n 1: SQDIFF NORMED \n 2: TM CCORR \n 3: TM CCORR NORMED \n 4: TM COEFF \n 5: TM COEFF NORMED";
createTrackbar(trackbar_label, image_window, &match_method, max_Trackbar, MatchingMethod);
MatchingMethod(0, 0);
waitKey(1);
}
return 0;
}
2.3 并且将其他部分放入您的主函数中;
2.4将本工程文件中的.pro文件配置到您的qt工程文件的pro中
如果这些库的索引你没有配置,请配置一下
最后的效果
















 8万+
8万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











