







**
玩转Matlab-Simscape(初级)- 01 - 从一个简单模型开始学习之旅
**
前言
在产品开发中,多体动力学控制仿真是一种常见方法,本文从初学者的角度一点点解开应用Maltab simscape对多体进行仿真的面纱。写这篇博文是为后续做旋翼无人机的多体系统仿真打基础。欢迎各位小伙伴关注、赞赞、留言和收藏。
一、从模板开始建模
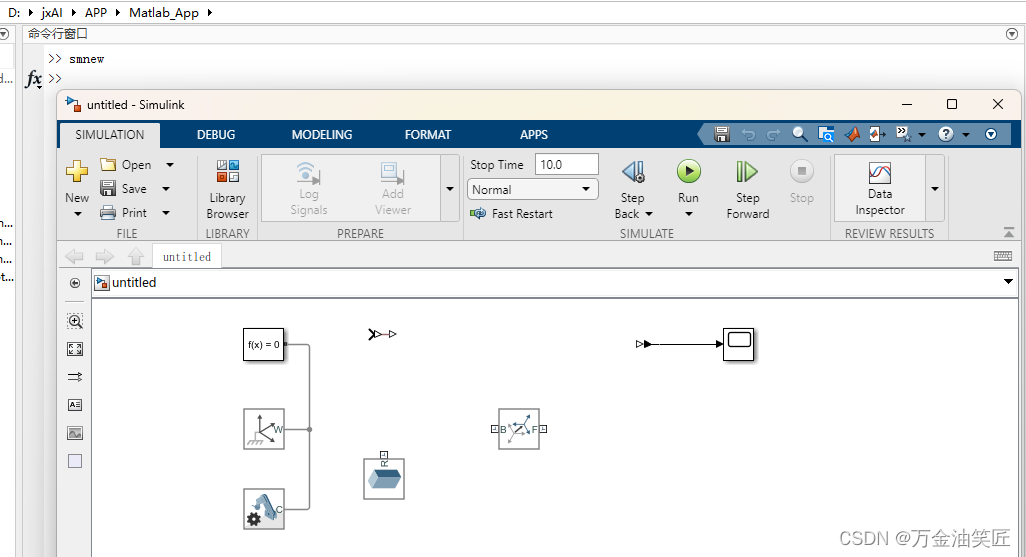
- 方法一:在matlab 命令行窗口中输入smnew新建一个simscape多体模型,如图所示。
方法二:在命令行窗口中输入sm_lib打开simscape多体库,从里面选取所需的模块。
方法三:在simulink窗口中搜索所需的模块。
二、建模一个简单的连杆
2.1 建模
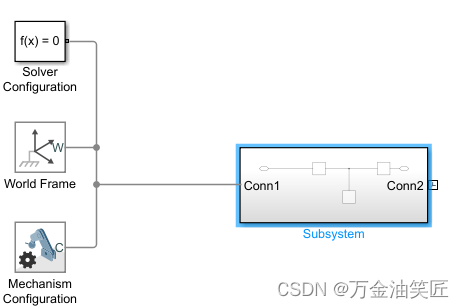
假设这个连杆是一个细长方体结构,两头有铰接点。按照下图连接各模块。
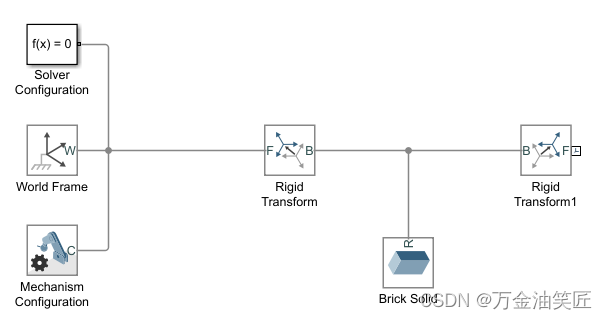
- **关于“Rigid Transform”:**定义了两个坐标系之间固定的三维刚体变换。变换的平移部分和旋转部分由两个独立的组件指定。可以自由组合不同的平移和旋转。端口B和F分别是表示基准坐标系和跟随坐标系的框架端口。该变换表示了在基准坐标系中跟随坐标系原点的位置以及轴的方向。
双击该模块定义如下 2. 关于“Brick Solid”:双击该模块,定义如下
2. 关于“Brick Solid”:双击该模块,定义如下 3. 关于“Solver Configuration”:
3. 关于“Solver Configuration”:
用于求解器的设置,必选模块 - 关于“World Frame”:
提供对世界或地面坐标系的访问,这是一个在任何机械模型中预定义的唯一静止、正交、右手坐标系。世界坐标系是机械模型中所有框架网络的基础。一个模型可以包含多个“世界坐标系”块,但它们都代表同一个坐标系。端口W是一个标识为世界坐标系的框架端口。任何直接与W端口相连的框架端口也都被标识为世界坐标系。 - 关于“Mechanism Configuration”:
设置应用于整个机器的机械和仿真参数,该机器是此块所连接的目标机器。在其“属性”部分中,可以为整个机构指定统一的重力加速度,并且还可以设置线性化变差。线性化变差指定了用于计算线性化数值偏导数的扰动值。端口C是一个框架节点,您可以通过机器任意框架节点的连线将其连接到目标机器上。
2.2 生成子系统
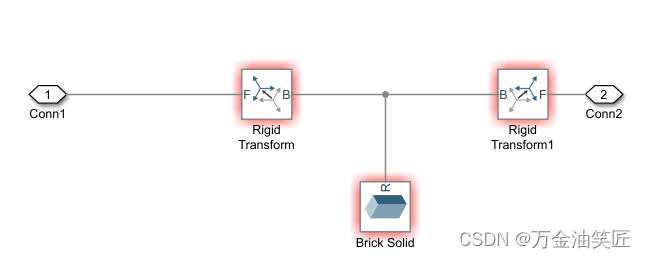
①选中“Brick Solid”和两个“Rigid Transform”,右键选择生成子系统,如下图所示: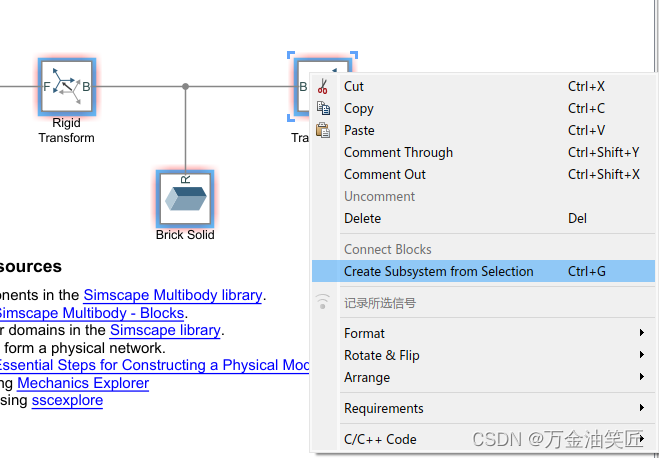
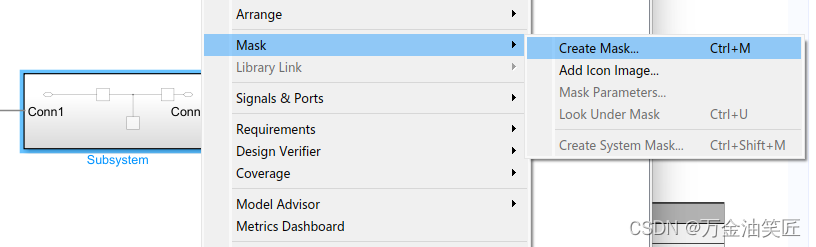
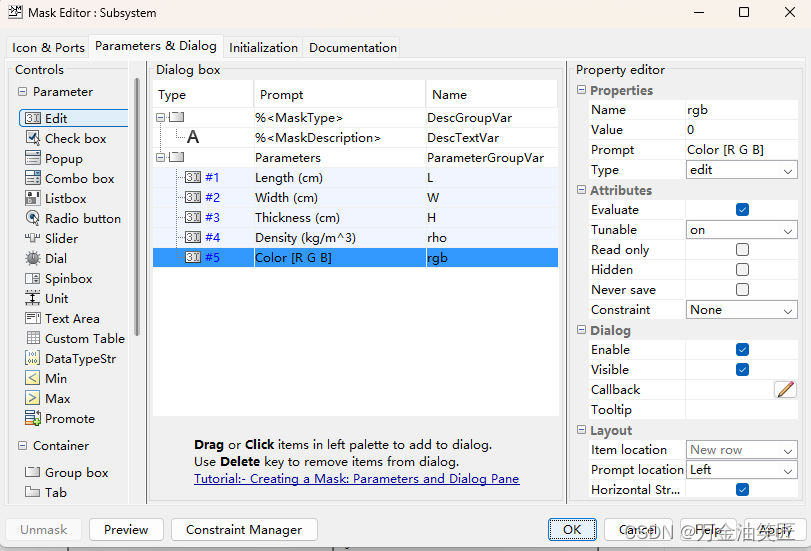
②右键子系统,创建封装Mask,并定义变量参数,如下图所示
③双击子系统模块模块,对模块参数定义如下: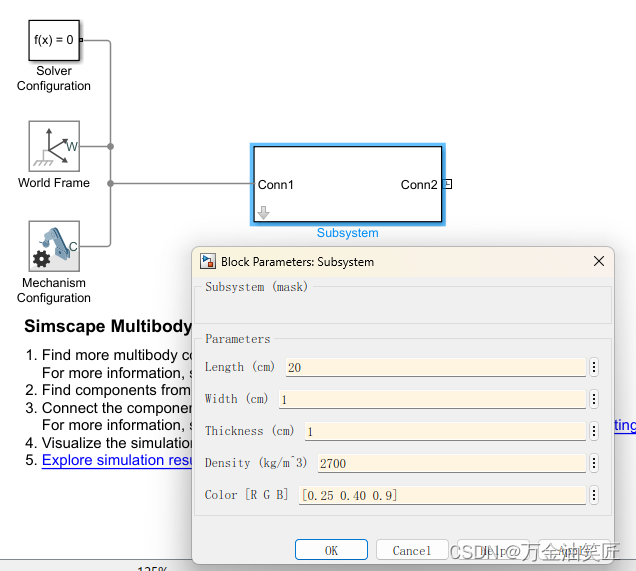
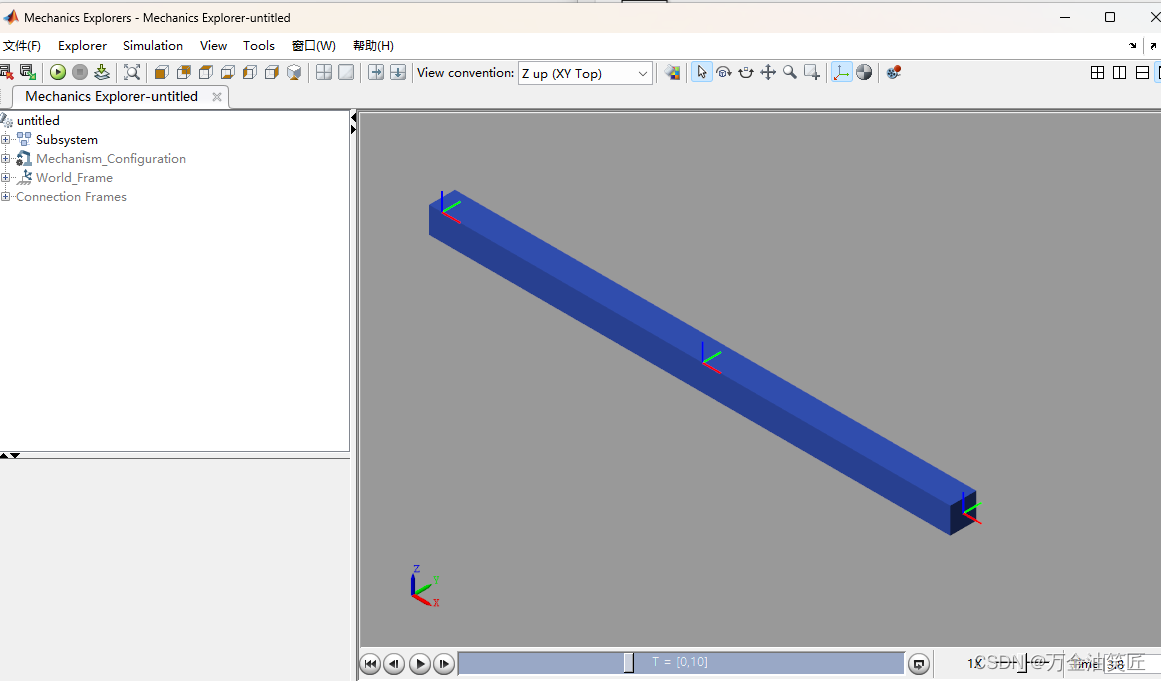
④可视化视图:点击Run,如图所示
⑤保存为自定义块:
将该子模块新建为库,并保存在simulink库中,用于后续调用。
总结
以上就是今天分享的关于Matlab simscape 的基础内容,简单分享了Simscape搭建模型,创建子系统,修改定义参数等内容,为将来深入学习和使用simscape做铺垫。欢迎各位小伙伴关注、赞赞、留言和收藏。














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









