







Chapter3 Neighborhood Reconstruction Methods
node embedding
- 把节点编码为低维向量-表征graph structure和local graph neighborhood structure
this chapter : low-dimensional embeddings of nodes
3.1 An Encoder-Decoder Perspective
encoder model
- 图→低维嵌入矩阵
decoder model
- 嵌入矩阵→重构节点邻居信息
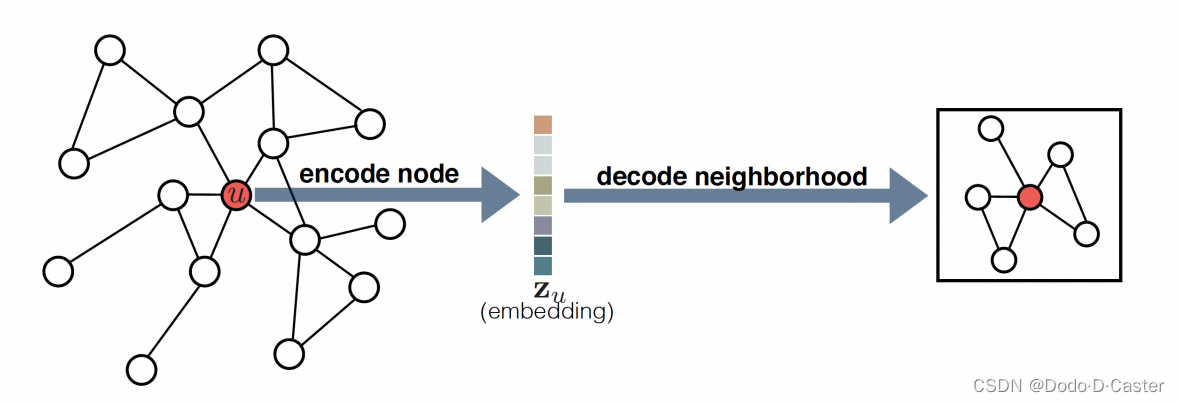
The encoder maps the node u to a low-dimensional embedding z u z_u zu.
The decoder then uses z u z_u zu **to reconstruct u’s local neighborhood information.
decoder : 给一对节点嵌入打分(相似值)
similarity function : 定义节点相似值(也就是真实的相似值)
loss function : 评估decoder的结果和真实值的差异
encoder
- shallow embedding methods
decoder
- pairwise decoders : 预测一对节点间关系/相似性
损失函数

D :训练集
D E C ( z u , z v ) DEC(z_u, z_v) DEC(zu,zv) :uv节点相似值
S[u,v] :uv节点真实相似值
降低L的方法 :stochastic gradient decent
encoder-decoder 框架的好处 :能够基于decoder function, graph-based similarity measure和loss function简洁地定义和比较不同的嵌入方法
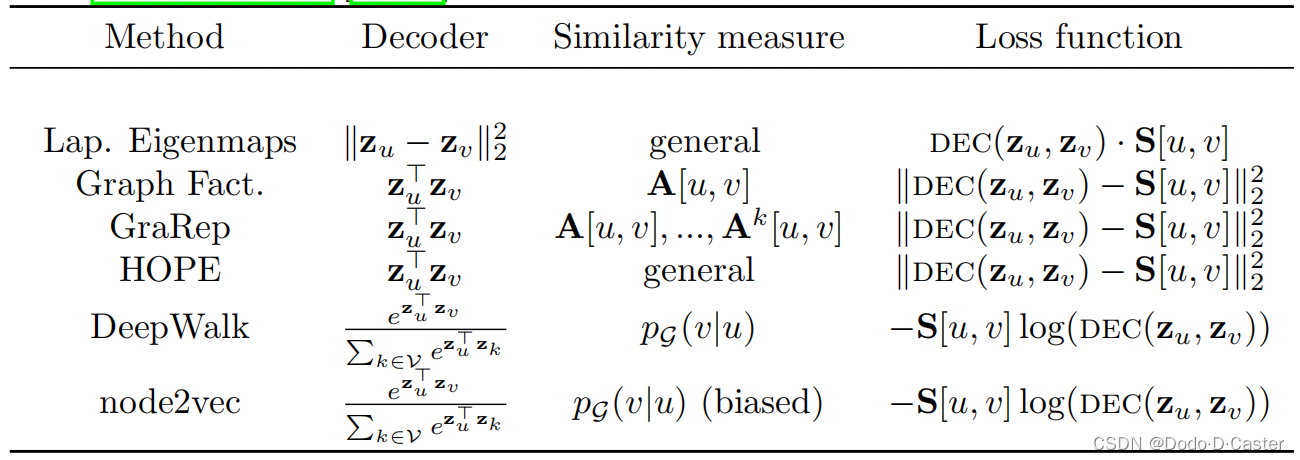
3.2 Factorization-based approaches
decoder的结果为DEC,即计算出来的节点间相似值
similarity measure为S[],表示真实的节点相似值
loss function表示计算值和真实值之间的差距
方法
- Laplacian eigenmaps
- Graph Factorization
- GraRep
- HOPE
3.3 Random walk embeddings
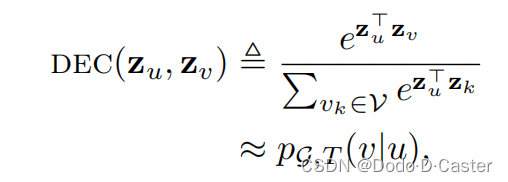
similarity measure表示为从u出发经过长度为T的walk访问v节点的可能性
这是与3.2最大的区别
方法
- DeepWalk
- node2vec
两个方法的区别:对损失函数的计算不同
损失函数计算复杂度很高,两者都通过计算approximate equation来近似,但方法不同
DeepWalk : hierarchical softmax
node2vec : noise contrastive
Large-scale information network embedings(LINE)
基本思想:结合两个encoder-decoder的目标
第一个目标
encode first-order adjacency information
- decoder:
- similarity measure:
- an adjacency-based similarity measure
- i.e., S[u, v] = A[u, v]
第二个目标
more similar to the random walk approaches
- decoder
- 使用KL-divergence训练来encode two-hop邻接信息
shallow embedding approaches
- 为图中每个节点训练一个独特的嵌入
- 缺点
- 节点间不共享数据-导致统计和计算低效
- 没有利用节点特征
- 只能为可见节点进行嵌入
- 除非特殊优化,否则不能学习不可见节点的嵌入















 3065
3065











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









