







代码
import numpy as np
import torch
def find_projection(x, y, x0, y0, x1, y1):
t = ((x - x0) * (x1 - x0) + (y - y0) * (y1 - y0)) / ((x1 - x0) ** 2 + (y1 - y0) ** 2)
t = np.clip(t, 0, 1)
v_x = x0 + (x1 - x0) * t
v_y = y0 + (y1 - y0) * t
return v_x, v_y, t
def projection(lines, points):
# lines: [M * 4] [x_s, y_s, x_1, y_1]
# points: [N * 2] [x, y]
# return: [N * M * 6]
# r, s, l, proj_x, proj_y, distance
vector_point = points[:, None] - lines[None, :, [0, 1]]
vector_line = lines[:, [2, 3]] - lines[:, [0, 1]]
square_line_length = torch.square(vector_line).sum(dim=-1)
line_length = torch.sqrt(square_line_length + 1e-6)
inner_product = (vector_point * vector_line[None, :]).sum(dim=-1)
output_product = vector_line[None, :, 0] * vector_point[:, :, 1] - vector_line[None, :, 1] * vector_point[:, :, 0]
s = inner_product / line_length
l = output_product / line_length
r = s / line_length
t = r.clamp(0, 1)
proj = lines[None, :, [0, 1]] + t[..., None] * vector_line[None]
distance = torch.sqrt((points[:, None] - proj).square().sum(dim=-1) + 1e-6)
return torch.cat([r[..., None], s[..., None], l[..., None], proj, distance[..., None]], dim=-1)
def projection_batch(lines, points, vectorized=True):
# lines: [B * M * 4] [x_s, y_s, x_1, y_1]
# points: [B * N * 2] [x, y]
# return: [B * N * M * 6]
# r, s, l, proj_x, proj_y, distance
assert points.shape[0] == lines.shape[0]
B, M = lines.shape[:2]
N = points.shape[1]
if vectorized:
vector_point = points[:, :, None] - lines[:, None, :, [0, 1]] # [B, M, 2]
else:
vector_point = points[:, :, None] - torch.zeros_like(lines)[:, None, :, [0, 1]]
vector_line = lines[:, :, [2, 3]] - lines[:, :, [0, 1]] # [B, N, 2]
square_line_length = torch.square(vector_line).sum(dim=-1)
line_length = torch.sqrt(square_line_length + 1e-6)
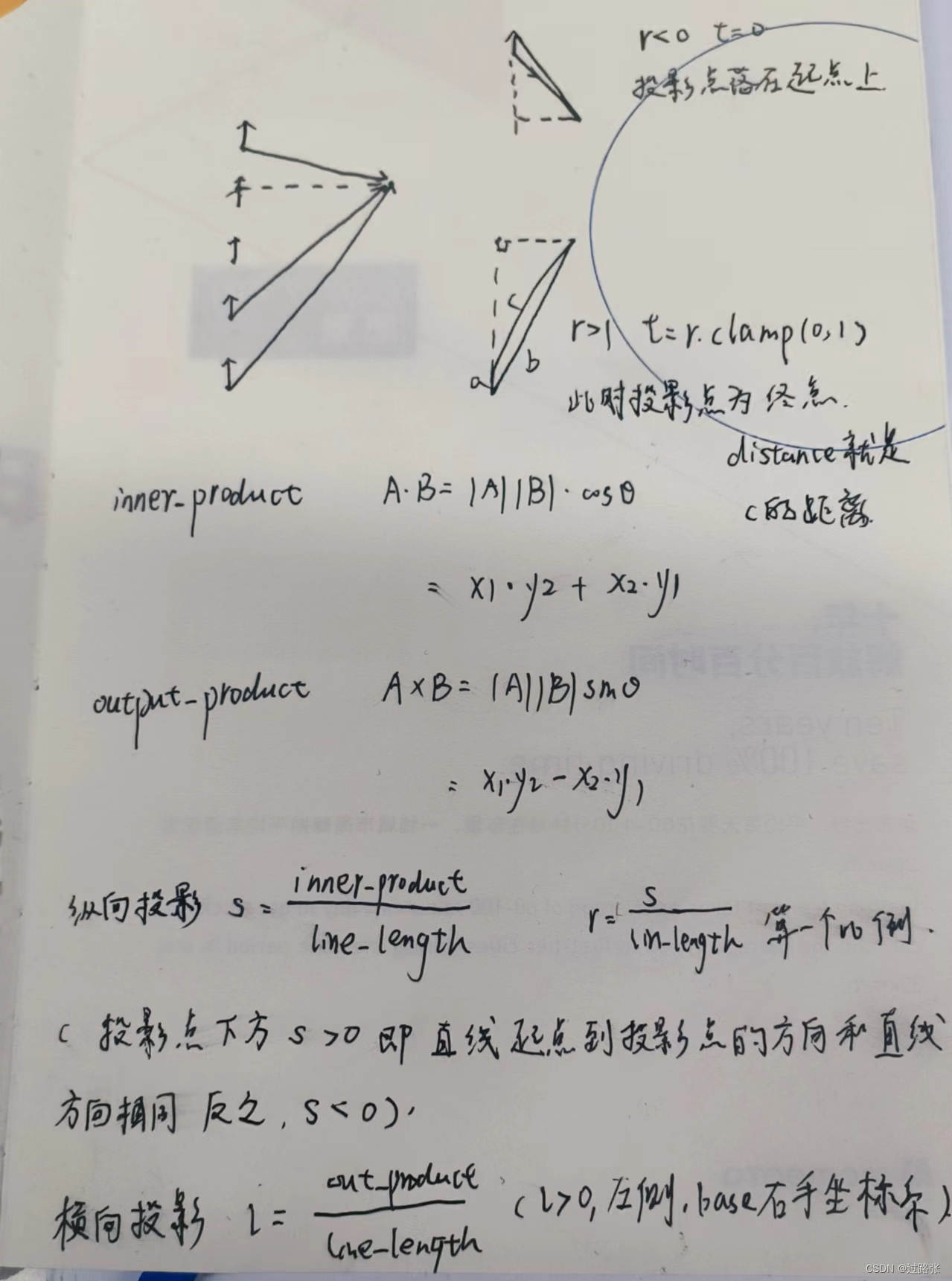
# A · B = |A||B|Cos(θ) ; A·B = x1*y2 + x2*y1
inner_product = (vector_point * vector_line[:, None, :]).sum(dim=-1)
# A x B = |A||B|Sin(θ) ; A*B = x1*y2-x2*y1
output_product = vector_line[:, None, :, 0] * vector_point[:, :, :, 1] - vector_line[:, None, :, 1] * vector_point[:, :, :, 0]
# points 向 lines 纵向投影
s = inner_product / line_length[:, None]
# points 向 lines 的横向投影
l = output_product / line_length[:, None]
# 这块应该除 vector_point 的 length 得到 Cos(θ)
r = s / line_length[:, None]
t = r.clamp(0, 1)
proj = lines[:, None, :, [0, 1]] + t[..., None] * vector_line[:, None]
distance = torch.sqrt((points[:, :, None] - proj).square().sum(dim=-1) + 1e-6)
return torch.cat([r[..., None], s[..., None], l[..., None], proj, distance[..., None]], dim=-1)
def projection_pairwise_batch(lines, points):
# lines: [B * N * 4] [x_s, y_s, x_1, y_1]
# points: [B * N * 2] [x, y]
# return: [B * N * 6]
# r, s, l, proj_x, proj_y, distance
assert points.shape[0] == lines.shape[0]
assert points.shape[1] == lines.shape[1]
B, M = lines.shape[:2]
vector_point = points - lines[:, :, [0, 1]]
vector_line = lines[:, :, [2, 3]] - lines[:, :, [0, 1]]
line_length = safe_norm(vector_line)
inner_product = (vector_point * vector_line).sum(dim=-1)
output_product = vector_line[:, :, 0] * vector_point[:, :, 1] - vector_line[:, :, 1] * vector_point[:, :, 0]
s = inner_product / line_length
l = output_product / line_length
r = s / line_length
t = r.clamp(0, 1)
proj = lines[:, :, [0, 1]] + t[..., None] * vector_line
distance = safe_norm(points - proj)
return torch.cat([r[..., None], s[..., None], l[..., None], proj, distance[..., None]], dim=-1)
def projection_np(lines, points):
# lines: [M * 4] [x_s, y_s, x_1, y_1]
# points: [N * 2] [x, y]
# return: [N * M * 6]
# r, s, l, proj_x, proj_y, distance
vector_point = points[:, None] - lines[None, :, [0, 1]]
vector_line = lines[:, [2, 3]] - lines[:, [0, 1]]
square_line_length = np.square(vector_line).sum(axis=-1)
line_length = np.sqrt(square_line_length + 1e-6)
inner_product = (vector_point * vector_line[None, :]).sum(axis=-1)
output_product = vector_line[None, :, 0] * vector_point[:, :, 1] - vector_line[None, :, 1] * vector_point[:, :, 0]
s = inner_product / line_length
l = output_product / line_length
r = s / line_length
t = r.clip(0, 1)
proj = lines[None, :, [0, 1]] + t[..., None] * vector_line[None]
distance = np.sqrt(np.square(points[:, None] - proj).sum(axis=-1) + 1e-6)
return np.concatenate([r[..., None], s[..., None], l[..., None], proj, distance[..., None]], axis=-1)
def safe_norm(lines):
# lines: [..., 2]
# return: [...]
return torch.sqrt(torch.sum(torch.square(lines), dim=-1) + 1e-6)

















 6989
6989











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











