






#include <ros/ros.h>
#include <visualization_msgs/Marker.h>
#include <cmath>
#include <fstream>
#include <iostream>
#include <string>
#include <sstream> //字符串转换
#include <fstream>
#include <string>
#include <vector>
#include <iomanip>
#include <algorithm>
using namespace std;
vector<double> location_x, location_y;
void ReadPath()
{
ifstream fin("src/using_markers/files/123.txt");
string line;
string s1 = "path";
string s2="pathmode";
if(fin)
{
while (getline(fin, line)) //按行读取到line_info中
{
//把每一行所有的冒号替换成逗号
replace(line.begin(),line.end(),':',',');
//筛选掉开头不是path的行
int index=line.find(s1);
int index2=line.find(s2);
vector<string> Waypoints;
string info;
if(index==0 && index2==-1)
{
//cout<<line<<endl;
istringstream sin(line); //create string input object
while (getline(sin, info, ','))
{
//replace(info.begin(),info.end(),':',',');
//cout << "info:" << info << endl;
Waypoints.push_back(info);
}
string x_str = Waypoints[1];
string y_str = Waypoints[2];
double x, y;
stringstream sx, sy; //transform string to double
sx << x_str;
sy << y_str;
sx >> x;
sy >> y;
location_x.push_back(x);
location_y.push_back(y);
}
}
}
else
{
cout<<"no such file"<<endl;;
}
// for(int j=0;j<location_x.size();j++)
// {
// cout<<setprecision(10)<<"location_x[" << j << "]: " << location_x[j]<<endl;
// cout<<setprecision(10)<<"location_x[" << j << "]: " << location_y[j]<<endl;
// cout<< endl;
// }
}
int main( int argc, char** argv )
{
setlocale(LC_ALL,"");
ros::init(argc, argv, "points_and_lines");
ros::NodeHandle n;
ros::Publisher marker_pub = n.advertise<visualization_msgs::Marker>("visualization_marker", 10);
ros::Rate r(30);
float f = 0.0;
ReadPath();
while (ros::ok())
{
//创建一个 visualization_msgs/Marker消息,并且初始化所有共享的数据。消息成员默认为0,仅仅设置位姿成员w。
visualization_msgs::Marker points, line_strip, line_list;
points.header.frame_id = line_strip.header.frame_id = line_list.header.frame_id = "/base_link";
points.header.stamp = line_strip.header.stamp = line_list.header.stamp = ros::Time::now();
points.ns = line_strip.ns = line_list.ns = "points_and_lines";
points.action = line_strip.action = line_list.action = visualization_msgs::Marker::ADD;
points.pose.orientation.w = line_strip.pose.orientation.w = line_list.pose.orientation.w = 1.0;
//分配三个不同的id到三个markers。points_and_lines名称空间的使用确保彼此不会相互冲突。
points.id = 0;
line_strip.id = 1;
//line_list.id = 2;
//设置marker类型到 POINTS, LINE_STRIP 和 LINE_LIST
points.type = visualization_msgs::Marker::POINTS;
line_strip.type = visualization_msgs::Marker::LINE_STRIP;
//line_list.type = visualization_msgs::Marker::LINE_LIST;
// scale成员对于这些marker类型是不同的,POINTS marker分别使用x和y作为宽和高,然而LINE_STRIP和LINE_LIST marker仅仅使用x,定义为线的宽度。单位是米。
points.scale.x = 0.2;
points.scale.y = 0.2;
// LINE_STRIP/LINE_LIST markers use only the x component of scale, for the line width
line_strip.scale.x = 0.1;
// line_list.scale.x = 0.1;
// 点为绿色
points.color.g = 1.0f;
points.color.a = 1.0;
// Line strip 是蓝色
line_strip.color.b = 1.0;
line_strip.color.a = 1.0;
//使用正弦和余弦生成螺旋结构。POINTS和LINE_STRIP markers都仅仅需要1个点作为每个顶点,然而LINE_LIST marker需要2个点 。
for (uint32_t i = 0; i < location_x.size(); ++i)
{
float y = 0;
float z = 0;
geometry_msgs::Point p;
p.x = location_x[i];
p.y = location_y[i];
// p.x = location_x[i];
// p.y = location_y[i];
cout<<p.x<<" "<<p.y<<endl;
p.z = 0;
points.points.push_back(p);
line_strip.points.push_back(p);
// The line list needs two points for each line
line_list.points.push_back(p);
p.z += 0.0;
//line_list.points.push_back(p);
}
//发布各个markers
marker_pub.publish(points);
marker_pub.publish(line_strip);
//marker_pub.publish(line_list);
r.sleep();
f += 0.04;
}
}
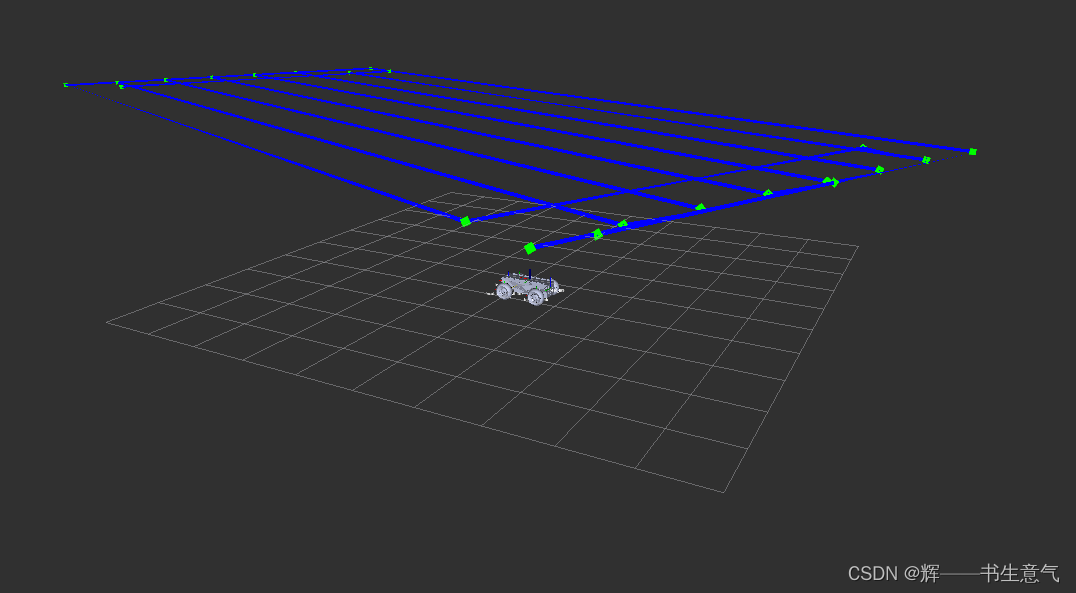

做导航系统时候写的,用的visualization_msgs::Marker通过点线构成。实现农机路径可视化
代码链接:链接:https://pan.baidu.com/s/15GnwAFFmpXmiPWrz_eHfWw?pwd=lgdi
提取码:lgdi














 5371
5371











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









