









 本文详细介绍了如何安装和使用rviz_satellite功能包,包括从源码克隆到编译,以及配置参数如Zoom和Blocks的含义。通过调整Zoom和Blocks的值,可以优化卫星地图的清晰度和覆盖范围。在使用中,rviz_satellite用于展示GNSS轨迹,适合差分RTK定位。示例图片展示了未使用差分时的不平滑轨迹。关键词涉及ROS、rviz、gnss和地图可视化。
本文详细介绍了如何安装和使用rviz_satellite功能包,包括从源码克隆到编译,以及配置参数如Zoom和Blocks的含义。通过调整Zoom和Blocks的值,可以优化卫星地图的清晰度和覆盖范围。在使用中,rviz_satellite用于展示GNSS轨迹,适合差分RTK定位。示例图片展示了未使用差分时的不平滑轨迹。关键词涉及ROS、rviz、gnss和地图可视化。
安装步骤
mkdir -p catkin_ws/src
cd catkin_ws/src
git clone https://github.com/nobleo/rviz_satellite # clone功能包
cd ..
catkin_make # 编译,如果编译报错,建议使用rosdep工具安装依赖
使用方法:
播放包含gnss信息的功能包,查看"/fix"话题中的初始定位状态下的经纬高,这里如果是差分RTK,建议采用固定解时候的经纬高。
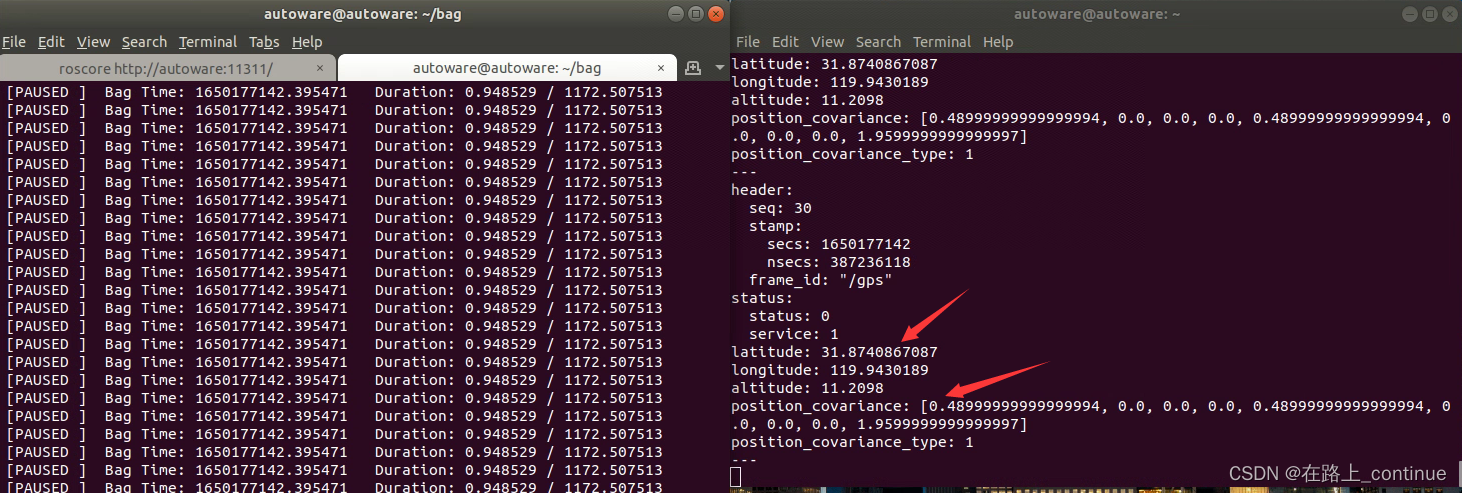 上图显示的经纬高以及position_covariance需要填入rviz_satellite的demo.gps的配置文件中。
上图显示的经纬高以及position_covariance需要填入rviz_satellite的demo.gps的配置文件中。
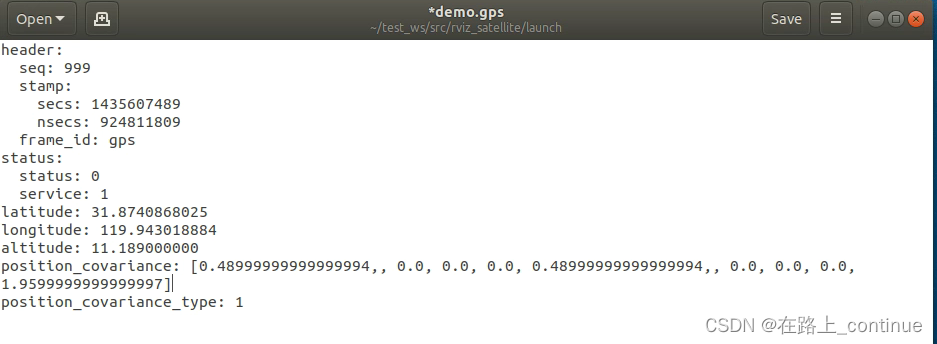 demo.gps文件中存储的就是消息类型为 sensor_msg/NavSatFix的一帧数据。
demo.gps文件中存储的就是消息类型为 sensor_msg/NavSatFix的一帧数据。
配置到基本就可以启动rviz_satellite功能包了,运行launch文件
roslaunch rviz_satellite demo.launch对参数的一些介绍:
重点关注Rviz界面的Zoom和Blocks这两个参数。
Readme.md文件中对这两个参数的介绍:
- `Zoom` is the zoom level of the map. Recommended values are 16-19, as anything smaller is _very_ low resolution. 22 is the current max.
- `Blocks` number of adjacent blocks to load. rviz_satellite will load the central block, and this many blocks around the center. 8 is the current max.
个人理解:
-Zoom:焦距,类似于分辨率。数值越大,卫星地图越清晰,同样Rviz中显示的卫星地图的范围也越小。
-Blocks:数值越大,加载的卫星地图范围越大。
一般Zoom和Blocks这两个参数同时设置,选取最优值。
附上一张自己跑出来的效果图: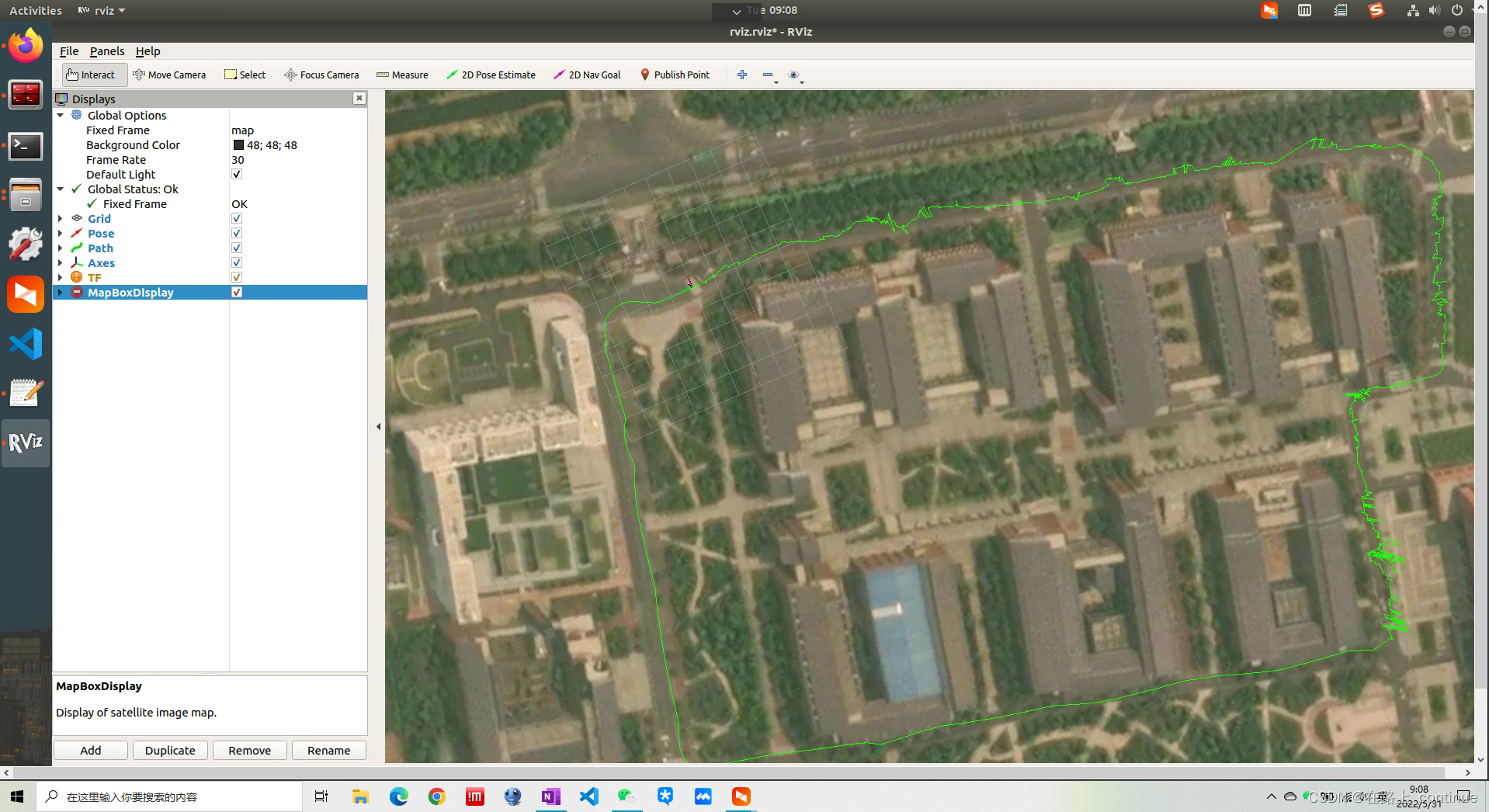
图中绿色的线即是绘出的GNSS轨迹,这里我没有用到差分,所以轨迹看上去不是很平滑。 可视化涉及到一些坐标转换,这里不做介绍。理论上就是WGS84转ENU。

















 229
229

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









