









在物联网(IoT)和嵌入式应用中,振动模块广泛应用于触觉反馈、报警和通知等场景。今天我们将探索如何在 ESP32 上使用 PWM 控制振动模块的震动强度和频率。本教程包含详细的代码示例和调试信息,帮助你轻松上手。
1. 准备工作
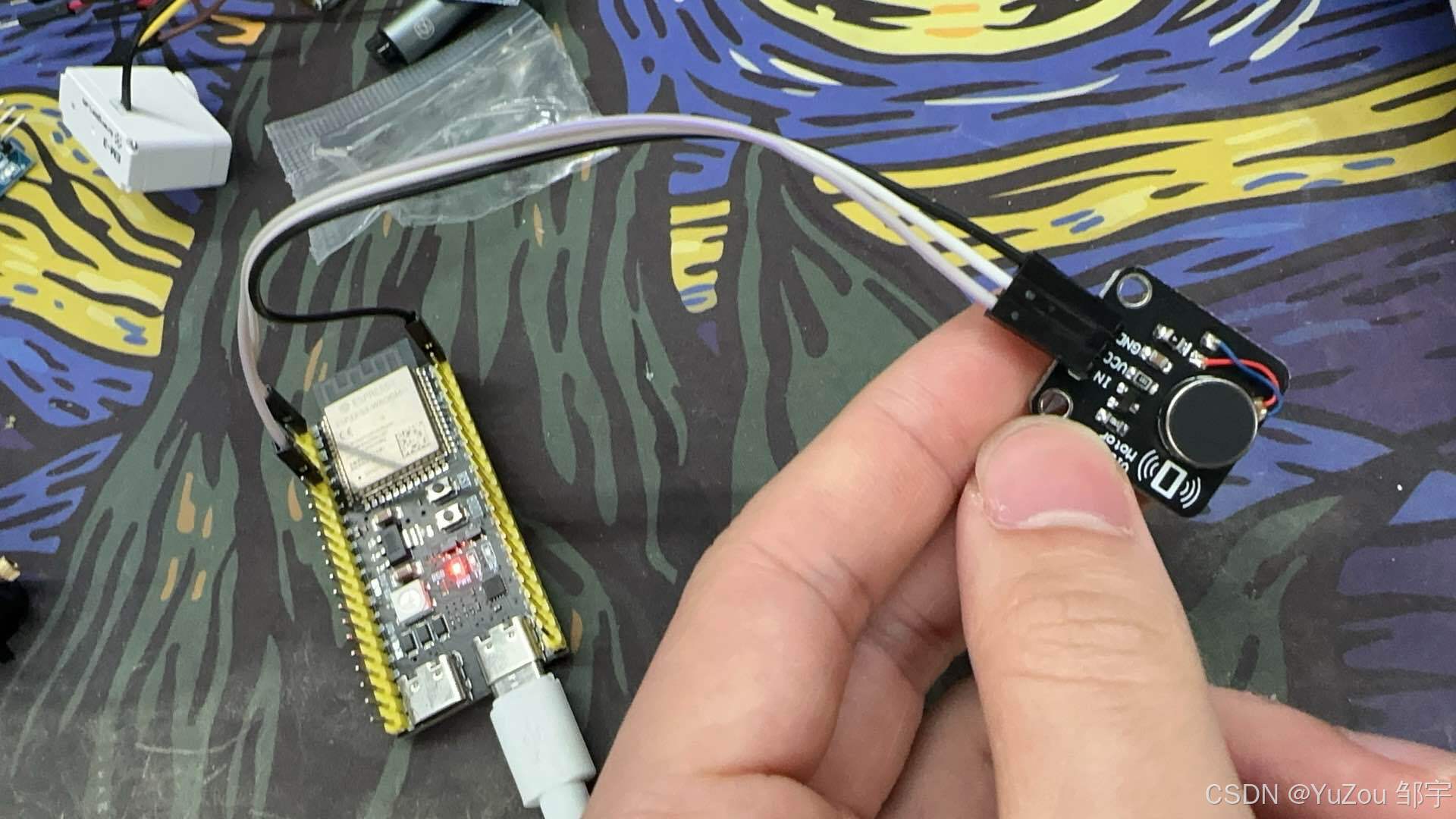
硬件需求:
- ESP32 开发板
- 振动模块(如 ERM 振动马达或 LRA 线性振动器)
- 杜邦线
软件需求:
- Arduino IDE 或 VSCode + PlatformIO(本教程以 PlatformIO 为例)
引脚说明: 我们将使用 GPIO 5 来控制振动模块,ESP32 的任意 PWM 兼容引脚均可用于此目的。
2. 什么是 PWM?
PWM(脉宽调制)是一种控制模拟电路的数字技术。通过快速切换高低电平,并调整“高电平”持续时间(称为占空比),我们可以控制振动模块的强弱。占空比越高,振动越强,占空比越低,振动越弱。ESP32 提供多个 PWM 通道,可以直接用于生成振动模块所需的控制信号。
3. 配置 PWM 控制振动模块
首先,我们在代码中配置 PWM 的基础参数:
- pwmChannel:ESP32 的 PWM 通道编号。ESP32 支持 16 个通道,我们使用通道 0。
- pwmFrequency:PWM 信号频率。常用的频率范围为 5000Hz,对于振动模块来说,5000Hz 通常合适。
- pwmResolution:PWM 分辨率。我们将分辨率设为 8 位,对应占空比范围 0 到 255。
完整代码示例
以下代码演示了如何使用 PWM 控制振动模块的震动强度,并输出调试信息,帮助你了解每个步骤的效果。
#include <Arduino.h>
// PWM 配置参数
const int pwmChannel = 0; // PWM 通道编号
const int pwmFrequency = 5000; // PWM 信号频率,单位 Hz
const int pwmResolution = 8; // PWM 分辨率(位数,8 位对应占空比 0~255)
const int pwmPin = 5; // 控制振动模块的引脚
void setup() {
// 初始化串口通讯,用于调试信息输出
Serial.begin(9600);
Serial.println("初始化串口通讯完成,开始配置 PWM 信号");
// 设置 PWM 通道、频率和分辨率
ledcSetup(pwmChannel, pwmFrequency, pwmResolution);
Serial.print("PWM 配置完成:");
Serial.print("通道 = "); Serial.print(pwmChannel);
Serial.print(", 频率 = "); Serial.print(pwmFrequency);
Serial.print(" Hz, 分辨率 = "); Serial.print(pwmResolution); Serial.println(" 位");
// 将 PWM 通道附加到指定引脚
ledcAttachPin(pwmPin, pwmChannel);
Serial.print("PWM 信号已连接到引脚 "); Serial.println(pwmPin);
}
void loop() {
// 调试信息:开始增加占空比,增加振动强度
Serial.println("逐步增加占空比,增加振动强度");
// 增加占空比,从 0 增加到 255(满震动),增加振动强度
for (int dutyCycle = 0; dutyCycle <= 255; dutyCycle += 5) {
ledcWrite(pwmChannel, dutyCycle); // 设置 PWM 占空比
Serial.print("当前占空比: "); Serial.println(dutyCycle); // 输出调试信息
delay(20); // 保持一段时间,观察效果
}
// 保持最大振动一段时间
delay(500);
Serial.println("保持最大振动一段时间");
// 调试信息:逐步减少占空比,减弱振动强度
Serial.println("逐步减少占空比,减弱振动强度");
// 减少占空比,从 255 减少到 0(停止震动),减弱振动强度
for (int dutyCycle = 255; dutyCycle >= 0; dutyCycle -= 5) {
ledcWrite(pwmChannel, dutyCycle);
Serial.print("当前占空比: "); Serial.println(dutyCycle); // 输出调试信息
delay(20); // 保持一段时间,观察效果
}
// 停止一段时间,循环等待
delay(1000);
Serial.println("震动周期结束,等待 1 秒后再开始新的周期");
}
代码详解
- 初始化串口通讯:使用
Serial.begin(9600)以 9600 的波特率初始化串口,用于输出调试信息。 - PWM 配置:
ledcSetup():将 PWM 通道 0 的频率设为 5000 Hz,分辨率设为 8 位。ledcAttachPin():将 PWM 通道绑定到 GPIO 5。
- 增加和减弱振动强度:
- 在
loop()中使用for循环逐步增加和减少占空比,从而控制振动模块的震动强度。增加和减少的过程会让振动效果更为柔和。
- 调试信息:每次更新占空比时,输出当前的占空比值,以便观察振动模块的状态。
4. 调试信息解读
在 PlatformIO 的串口监视器中,我们可以看到以下调试信息,这些信息帮助我们确认每一步的执行状态:
初始化串口通讯完成,开始配置 PWM 信号
PWM 配置完成:通道 = 0, 频率 = 5000 Hz, 分辨率 = 8 位
PWM 信号已连接到引脚 5
逐步增加占空比,增加振动强度
当前占空比: 0
当前占空比: 5
...
保持最大振动一段时间
逐步减少占空比,减弱振动强度
当前占空比: 255
当前占空比: 250
...
震动周期结束,等待 1 秒后再开始新的周期
在调试信息中,每次循环都会显示当前的占空比,这样你可以根据振动模块的实际反应来调整代码中占空比的变化速率或范围,进一步优化效果。
5. 调整和优化建议
- 占空比范围:若希望振动更强,可以增大占空比的变化步长,如从
+= 5调整为+= 10,使振动更明显。 - 频率调整:如果发现振动效果不明显,尝试增大或减小
pwmFrequency的值,不同的模块对频率敏感度不同。 - 调试延迟:减少或增加
delay()时间,可以调整振动效果的快慢。使用短的delay(10)可以实现较为快速的振动变化。
6. 总结
通过 PWM 信号控制振动模块的震动强度和频率,是一个很好的学习嵌入式控制和反馈系统的项目。我们使用了 ESP32 的 PWM 通道,设置了不同的占空比,逐步增加和减少振动强度。同时,详细的调试信息让我们更清楚地观察到程序的执行过程。你可以根据自己的需求进一步调整 PWM 参数,探索更多控制效果。



















 860
860

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











