







关于Open3D库,好多文章都是用的Python API,官方文档范例也是以Python为主,没怎么见过C++的,这里做个记录。
#include <open3d/io/PointCloudIO.h>
#include <open3d/geometry/TriangleMesh.h>
#include <open3d/visualization/utility/DrawGeometry.h>
open3d::geometry::PointCloud cloud;
open3d::io::ReadPointCloudOption option;
bool success = open3d::io::ReadPointCloudFromPCD("./cow.pcd", cloud, option);
//法线估计,泊松表面重建需要点云具有法线,但并非所有的点云都具有法线,此时便需要先进行法线估计
cloud.EstimateNormals();
//法线方向对其连续的切平面,k为最近邻点的个数
cloud.OrientNormalsConsistentTangentPlane(50);
//泊松表面重建
auto result = open3d::geometry::TriangleMesh::CreateFromPointCloudPoisson(cloud);
auto mesh = std::get<0>(result);
//密度值
auto density = std::get<1>(result);
//根据顶点密度值进行筛选
std::vector<bool> vertices_to_remove;
for (int i = 0; i < density.size(); i++)
{
if (density[i] < 4.5)
{
vertices_to_remove.push_back(true);
}
else
{
vertices_to_remove.push_back(false);
}
}
mesh->RemoveVerticesByMask(vertices_to_remove);
std::vector<std::shared_ptr<const open3d::geometry::Geometry>> v;
v.push_back(mesh);
open3d::visualization::DrawGeometries(v, "Open3D", 800, 600, 50, 50, false, true, true);
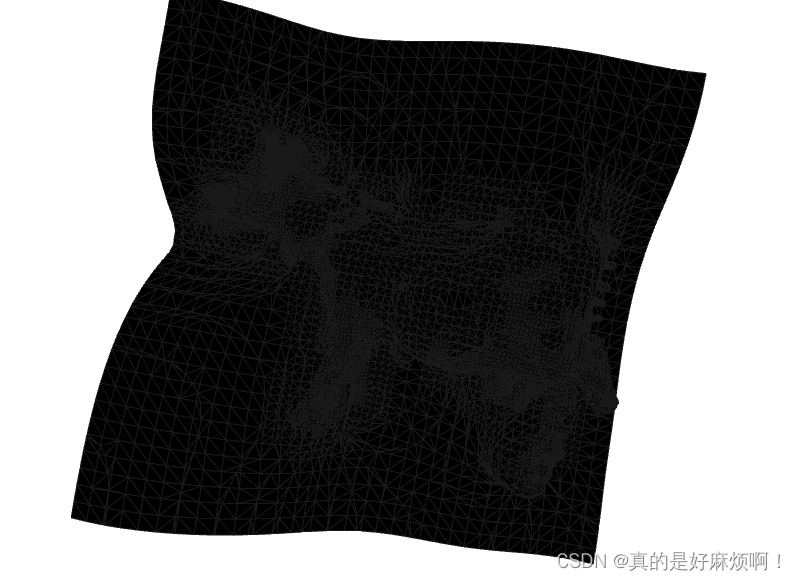
运行效果:

关于密度值:
参见回答:泊松表面重建之后为什么会多出来一部分?
说是泊松重建更适合水密性的点云(点云所表达的模型是闭合的),对于非水密性点云的重建效果不好,会有多余面片,如下图。然后说泊松重建的作者提出了解决办法,似乎就是每个点会产生密度值(毕竟Open3D集成的就是泊松重建作者的开源库),然后根据密度值对顶点进行筛选删除。
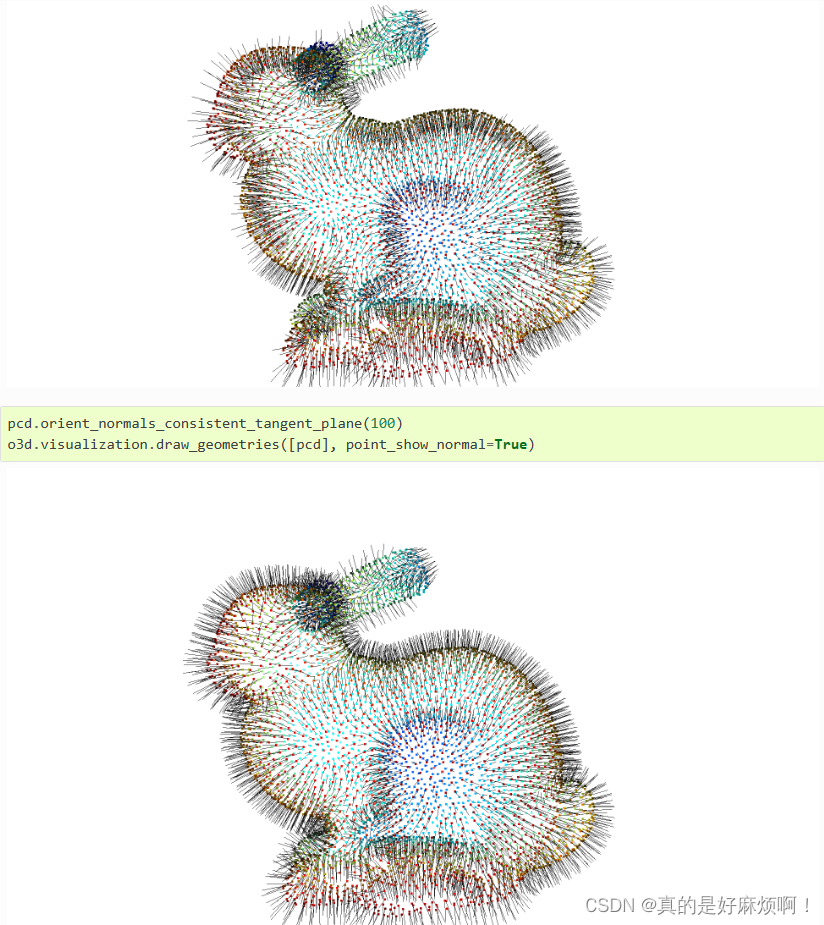
根据文档,如下图,调用OrientNormalsConsistentTangentPlane似乎能修复部分法线的方向,从而使得泊松表面重建的效果更好。















 856
856











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









