







一、算法原理
1.简介
表面法线估计是计算三维点云或网格中每个点处表面方向的基本任务。它涉及根据每个点周围的局部几何信息计算表面的方向向量。这些表面法线提供了关于对象或场景几何形状的重要信息,并在诸如物体识别、形状分析和三维重建等应用中使用。
在Open3D中,您可以使用estimate_normals()函数来估计点云或三角网格中每个点的表面法线。该函数基于该点周围的局部几何计算每个点的法线向量。
2.主要函数
表面法线估计
mesh.compute_vertex_normals() # 根据每个顶点周围的邻域三角形的法线计算顶点法线
渲染
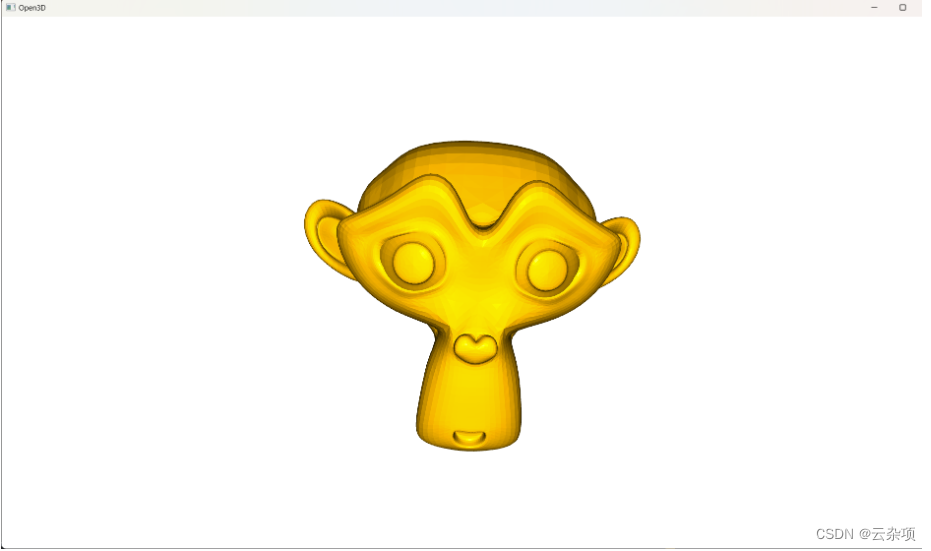
mesh.paint_uniform_color([1, 0.706, 0]) # 渲染颜色(金色)
二、代码
import open3d as o3d
import numpy as np
if __name__ == '__main__':
mesh = o3d.io.read_triangle_mesh('res/monkey.ply')
o3d.visualization.draw_geometries([mesh])
mesh.compute_vertex_normals() # 根据每个顶点周围的邻域三角形的法线计算顶点法线
print(np.asarray(mesh.triangle_normals)) # 打印网格数据
mesh.paint_uniform_color([1, 0.706, 0]) # 渲染颜色(金色)
o3d.visualization.draw_geometries([mesh])
三、结果
1.原点云数据
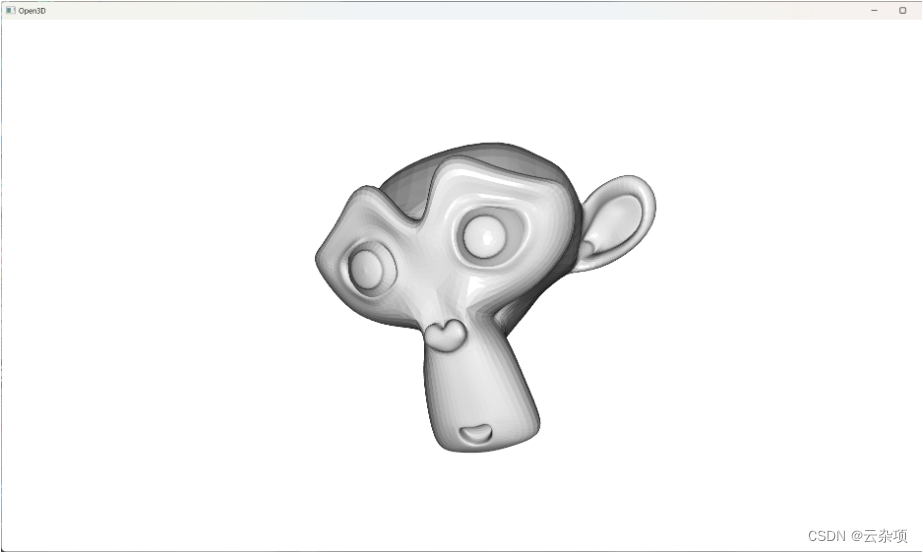
2.表面法线估计
3.渲染颜色
四、相关数据
网格点云操作:open3d 点云、图像、网格的读取、保存、显示_open3d 图片显示-CSDN博客
点云颜色更多操作:基础点云学习:点云上色、大小改变、窗口背景改变、绘制常用类型图形_open3d显示点云 设置背景颜色和点云颜色-CSDN博客















 465
465











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











