






版权声明:本文为CSDN博主「悄然的我-粤Y」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/u010848251/article/details/70992345
———————————————————————————————
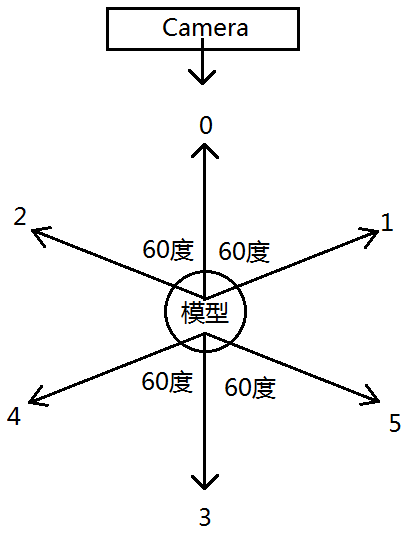
废话不多说,我采用的是Kinect v2 + PCL 的方法对模型奶牛进行重建。关键的想法如下图所示:
Kinect摄像机固定不动,从6个角度去拍摄模型奶牛,每个角度拍一帧(当然,想要有好的细节应该每个角度多拍几帧。这里假设只拍一帧),拍摄顺序为0-1-2-3-4-5,先右转60度后左转60度。获取到点云后,把前面3帧(即0-1-2)的点云融合,然后把后面3帧(即3-4-5)的点云融合,最后把前面的点云与后面的点云进行融合。大概的想法为这样子。
这篇文章先介绍如何获取点云数据。我使用的是二代Kinect,PCL1.8.0(没有用到太高级的库,所以个人觉得1.6以上的都行),事先要装Kinect SDK和配置好PCL环境。(这些 配置网上已经有很多教程,这里不叙述)。这里只获取深度数据,然后转化为点云。完整代码会在最后面给出。
首先看一下拍摄环境:


如左图所示,摄像机底下放了3个Kinect盒子,模型奶牛底下也放了1个Kinect盒子。模型奶牛到摄像机的距离大概在0.8米~1米之间。由于地板上有那些线,我利用这个十字点来当成旋转的中心,如右图所示。
生成点云的时候,我使用了PCL中“条件与”的方法过滤了一些点云(或者说只提取感兴趣或范围内的点云)。如下例代码所示:
//-----------------------提取范围内的点------------------------
pcl::ConditionAnd<MyPointDataType>::Ptr range_cond(new pcl::ConditionAnd<MyPointDataType>());
range_cond->addComparison(pcl::FieldComparison<MyPointDataType>::ConstPtr(new pcl::FieldComparison<MyPointDataType>("z", pcl::ComparisonOps::GT, 0.001)));
range_cond->addComparison(pcl::FieldComparison<MyPointDataType>::ConstPtr(new pcl::FieldComparison<MyPointDataType>("z", pcl::ComparisonOps::LT, 2.0)));
range_cond->addComparison(pcl::FieldComparison<MyPointDataType>::ConstPtr(new pcl::FieldComparison<MyPointDataType>("x", pcl::ComparisonOps::GT, -0.5)));
range_cond->addComparison(pcl::FieldComparison<MyPointDataType>::ConstPtr(new pcl::FieldComparison<MyPointDataType>("x", pcl::ComparisonOps::LT, 0.5)));
//range_cond->addComparison(pcl::FieldComparison<MyPointDataType>::ConstPtr(new pcl::FieldComparison<MyPointDataType>("y", pcl::ComparisonOps::GT, -0.85)));
pcl::ConditionalRemoval<MyPointDataType> condrem(range_cond, false);
condrem.setInputCloud(cloud);
condrem.setKeepOrganized(false);
condrem.filter(*cloud_filtered);
//--------------------------------------------------------------这里,对于Z值来说,0.001<Z<2.0,是我想要的点云。因为深度图里有很多深度值为0的数据,所以我只提取有深度值的点云,所以要大于0.001。然后我只要距摄像机2米之内的点云,这样可以过滤掉后面背景的那些点云。(Tips:这里的浮点数可以大概看成是现实中以米为单位的数值,如2.0大概表示现实中的2米)。而对于X值来说,-0.5<X<0.5,同样也是为了过滤掉左右两边不想要的点云。而对Y值有点特殊,这里不作处理(我注释掉了)。对于实验不同的情况,可以调节你想要的范围内的点云。
拍摄的时候,有一个非常重要的前提——摄像机一定要水平放,这是非常重要的事情,接下来会解释。
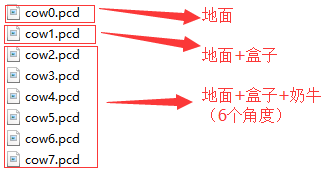
从想法上看,我们应该要拍6帧数据。但是,我这里还要先额外拍2帧数据。
首先第一帧数据:


拍摄的是地面的点云数据。这是为了后面去除地面点云数据而准备的。想法很简单:因为我们假设摄像机是水平放置的,那么生成的地面点云大概会在一个平面上(某一个xz平面上),那么我们只要获取这些地面点云中最大的Y值坐标(yMax1),就可以用来去除地面点云。即Y值小于yMax1的点云为地面点云,或者说Y值大于yMax1的点云为非地面点云。
第二帧数据:


拍摄的是只有盒子的点云数据。同上面一样,因为我们假设摄像机是水平放置的,那么我们获取这些点云中最大的Y值坐标(yMax2),即为盒子上表面的坐标。因为模型奶牛是放在盒子上面的,那么对于去除了地面点云的数据,只剩下盒子和模型奶牛的数据,我们可以通过这个yMax2来分开盒子与模型奶牛的数据,即Y值小于yMax2的点云为盒子点云,Y值大于yMax2的点云为模型奶牛点云。
这里区分盒子与奶牛点云数据是非常重要的,这里简单讲一下。在最后面——前后点云融合的时候,我们是想把奶牛的前后点云数据进行融合,然而这是一件非常困难的事情,因为前后点云数据之间重叠的点云非常少,或者说其对应点(Corresponding Points)少得可怜,难以进行配准。因此,我们改为对奶牛底下的盒子进行配准。因为盒子与奶牛之间相对固定的,拍摄的时候我没有去移动过奶牛,只对盒子进行了移动,那么奶牛也会跟随盒子进行移动。如果我们能够对盒子进行前后配准,那么相当于把奶牛前后配准好了。
下面是从6个不同角度去拍摄,其顺序在最开始的图已经说明了,其旋转角度大概在60度左右就进行了,不一定要很准确。
下面按照0-1-2-3-4-5的顺序进行拍摄,先右转后左转:












于是,我们总共生成了8个PCD文件:
这些文件都只是点云数据,即XYZ数据。下面是完整代码:
#define vtkRenderingCore_AUTOINIT 4(vtkInteractionStyle,vtkRenderingFreeType,vtkRenderingFreeType,vtkRenderingOpenGL)
#define vtkRenderingVolume_AUTOINIT 1(vtkRenderingVolumeOpenGL)
#include <Windows.h>
#include <iostream>
#include <kinect.h>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <pcl/io/pcd_io.h> //PCL的PCD格式文件的输入输出头文件
#include <pcl/point_types.h> //PCL对各种格式的点的支持头文件
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/radius_outlier_removal.h>
#include <pcl/filters/conditional_removal.h>
#include <pcl/filters/statistical_outlier_removal.h>
#include <pcl/registration/icp.h> //ICP(iterative closest point)配准
#include <pcl/console/parse.h> //pcl控制台解析
//kd树
#include <pcl/kdtree/kdtree_flann.h>
//特征提取
#include <pcl/features/normal_3d_omp.h>
#include <pcl/features/normal_3d.h>
//重构
#include <pcl/surface/gp3.h>
#include <pcl/surface/poisson.h>
#include <boost/thread/thread.hpp>
#include <string.h>
using namespace cv;
using namespace std;
typedef pcl::PointXYZ MyPointDataType;
// 安全释放指针
template<class Interface>
inline void SafeRelease(Interface *& pInterfaceToRelease)
{
if (pInterfaceToRelease != NULL)
{
pInterfaceToRelease->Release();
pInterfaceToRelease = NULL;
}
}
string num2str(int i)
{
stringstream ss;
ss << i;
return ss.str();
}
int main()
{
// 获取Kinect设备
IKinectSensor* m_pKinectSensor;
HRESULT hr;
hr = GetDefaultKinectSensor(&m_pKinectSensor);
if (FAILED(hr))
{
return hr;
}
IMultiSourceFrameReader* m_pMultiFrameReader;
if (m_pKinectSensor)
{
hr = m_pKinectSensor->Open();
if (SUCCEEDED(hr))
{
// 获取多数据源到读取器
hr = m_pKinectSensor->OpenMultiSourceFrameReader(
//FrameSourceTypes::FrameSourceTypes_Color |
//FrameSourceTypes::FrameSourceTypes_Infrared |
FrameSourceTypes::FrameSourceTypes_Depth,
&m_pMultiFrameReader);
}
}
if (!m_pKinectSensor || FAILED(hr))
{
return E_FAIL;
}
UINT16 *depthData = new UINT16[424 * 512];//用于存储深度图数据
Mat i_rgb(1080, 1920, CV_8UC4);
Mat i_depthWrite(424, 512, CV_16UC1);
UINT nColorBufferSize = 1920 * 1080 * 4;
// 三个数据帧及引用
IDepthFrameReference* m_pDepthFrameReference = nullptr;
IColorFrameReference* m_pColorFrameReference = nullptr;
IDepthFrame* m_pDepthFrame = nullptr;
IColorFrame* m_pColorFrame = nullptr;
IMultiSourceFrame* m_pMultiFrame = nullptr;
ICoordinateMapper* m_pCoordinateMapper = nullptr;
int count = 0;
while (count <= 30)
{
Sleep(5000);
while (true)
{
// 获取新的一个多源数据帧
hr = m_pMultiFrameReader->AcquireLatestFrame(&m_pMultiFrame);
if (FAILED(hr) || !m_pMultiFrame)
{
continue;
}
break;
}
// 从多源数据帧中分离出彩色数据,深度数据
if (SUCCEEDED(hr))
hr = m_pMultiFrame->get_DepthFrameReference(&m_pDepthFrameReference);
if (SUCCEEDED(hr))
hr = m_pDepthFrameReference->AcquireFrame(&m_pDepthFrame);
//if (SUCCEEDED(hr))
// hr = m_pMultiFrame->get_ColorFrameReference(&m_pColorFrameReference);
//if (SUCCEEDED(hr))
// hr = m_pColorFrameReference->AcquireFrame(&m_pColorFrame);
hr = m_pKinectSensor->get_CoordinateMapper(&m_pCoordinateMapper);
//if (SUCCEEDED(hr))
// hr = m_pColorFrame->CopyConvertedFrameDataToArray(nColorBufferSize, i_rgb.data, ColorImageFormat::ColorImageFormat_Bgra);
// 定义相关变量
pcl::PointCloud<MyPointDataType>::Ptr cloud(new pcl::PointCloud<MyPointDataType>);
pcl::PointCloud<MyPointDataType>::Ptr cloud_filtered(new pcl::PointCloud<MyPointDataType>);
//初始化点云数据PCD文件头
cloud->width = 512 * 424;
cloud->height = 1;
cloud->is_dense = false;
cloud->points.resize(cloud->width * cloud->height);
if (SUCCEEDED(hr))
{
hr = m_pDepthFrame->CopyFrameDataToArray(424 * 512, depthData);
/*hr = m_pDepthFrame->CopyFrameDataToArray(424 * 512, reinterpret_cast<UINT16*>(i_depthWrite.data));
imwrite("depth_" + num2str(count) + ".png", i_depthWrite);*/
CameraSpacePoint* m_pCameraCoordinates = new CameraSpacePoint[512 * 424];
hr = m_pCoordinateMapper->MapDepthFrameToCameraSpace(512 * 424, depthData, 512 * 424, m_pCameraCoordinates);
//ColorSpacePoint* m_pColorCoordinates = new ColorSpacePoint[512 * 424];
//hr = m_pCoordinateMapper->MapDepthFrameToColorSpace(512 * 424, depthData, 512 * 424, m_pColorCoordinates);
for (int i = 0; i < 512 * 424; i++)
{
//------写入RGB------
/*ColorSpacePoint colorP = m_pColorCoordinates[i];
if (colorP.X != -std::numeric_limits<float>::infinity() && colorP.Y != -std::numeric_limits<float>::infinity())
{
int colorX = static_cast<int>(colorP.X + 0.5f);
int colorY = static_cast<int>(colorP.Y + 0.5f);
if ((colorX >= 0 && colorX < 1920) && (colorY >= 0 && colorY < 1080))
{
cloud->points[i].b = i_rgb.data[(colorY * 1920 + colorX) * 4];
cloud->points[i].g = i_rgb.data[(colorY * 1920 + colorX) * 4 + 1];
cloud->points[i].r = i_rgb.data[(colorY * 1920 + colorX) * 4 + 2];
}
}*/
//------写入XYZ------
CameraSpacePoint cameraP = m_pCameraCoordinates[i];
if (cameraP.X != -std::numeric_limits<float>::infinity() && cameraP.Y != -std::numeric_limits<float>::infinity() && cameraP.Z != -std::numeric_limits<float>::infinity())
{
float cameraX = static_cast<float>(cameraP.X);
float cameraY = static_cast<float>(cameraP.Y);
float cameraZ = static_cast<float>(cameraP.Z);
cloud->points[i].x = cameraX;
cloud->points[i].y = cameraY;
cloud->points[i].z = cameraZ;
}
}
}
//-----------------------提取范围内的点------------------------
pcl::ConditionAnd<MyPointDataType>::Ptr range_cond(new pcl::ConditionAnd<MyPointDataType>());
range_cond->addComparison(pcl::FieldComparison<MyPointDataType>::ConstPtr(new pcl::FieldComparison<MyPointDataType>("z", pcl::ComparisonOps::GT, 0.001)));
range_cond->addComparison(pcl::FieldComparison<MyPointDataType>::ConstPtr(new pcl::FieldComparison<MyPointDataType>("z", pcl::ComparisonOps::LT, 2.0)));
range_cond->addComparison(pcl::FieldComparison<MyPointDataType>::ConstPtr(new pcl::FieldComparison<MyPointDataType>("x", pcl::ComparisonOps::GT, -0.5)));
range_cond->addComparison(pcl::FieldComparison<MyPointDataType>::ConstPtr(new pcl::FieldComparison<MyPointDataType>("x", pcl::ComparisonOps::LT, 0.5)));
//range_cond->addComparison(pcl::FieldComparison<MyPointDataType>::ConstPtr(new pcl::FieldComparison<MyPointDataType>("y", pcl::ComparisonOps::GT, -0.85)));
pcl::ConditionalRemoval<MyPointDataType> condrem(range_cond, false);
condrem.setInputCloud(cloud);
condrem.setKeepOrganized(false);
condrem.filter(*cloud_filtered);
//--------------------------------------------------------------
//-----------------------去除离群点------------------------
//pcl::RadiusOutlierRemoval<MyPointDataType> outrem;
//outrem.setInputCloud(cloud_filtered);
//outrem.setRadiusSearch(0.03);
//outrem.setMinNeighborsInRadius(15);
//outrem.filter(*cloud_filtered);
//pcl::StatisticalOutlierRemoval<MyPointDataType> sor;
//sor.setInputCloud(cloud_filtered);
//sor.setMeanK(10);
//sor.setStddevMulThresh(1.0);
//sor.filter(*cloud_filtered);
//--------------------------------------------------------------
string s = "cow";
s += num2str(count);
s += ".pcd";
pcl::io::savePCDFile(s, *cloud_filtered,false); //将点云保存到PCD文件中
std::cerr << "Saved " << cloud_filtered->points.size() << " data points." << std::endl;
s.clear();
//Beep(1046, 1000);
// 显示结果图
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D viewer"));
viewer->addPointCloud(cloud_filtered);
viewer->resetCamera();
viewer->addCoordinateSystem(0.1);
viewer->initCameraParameters();
while (!viewer->wasStopped()){
viewer->spinOnce();
}
count++;
cout << "test" << endl;
// 释放资源
SafeRelease(m_pDepthFrame);
SafeRelease(m_pDepthFrameReference);
SafeRelease(m_pColorFrame);
SafeRelease(m_pColorFrameReference);
SafeRelease(m_pMultiFrame);
}
// 关闭窗口,设备
m_pKinectSensor->Close();
SafeRelease(m_pKinectSensor);
std::system("pause");
return 0;
}————————————————
版权声明:本文为CSDN博主「悄然的我-粤Y」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/u010848251/article/details/70992345















 2424
2424











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









