






FOC算法笔记
起源:使用ST WorkBench配置的HALL BLDC控制算法抖动严重。
ST的电机控制算法,代码非常高端大气,值得学习。
HAL库与LL库混用,效率很高。很多中断回调都直接重写了,没有使用HAL库那一套。
只是好多地方不知道干嘛的,改动也无从下手。
为了加深理解,这里选择自己敲一遍。谨此记录。
1、硬件配置
stm32G474RET6 + X-NUCLEO-IHM07M1 ;

一对极BLDC;

12V直流电源;
逻辑分析仪/示波器;
红外测速仪器;
2、软件配置
这里使用keil5+cubeMX; 电机控制板和驱动板的原理图必须搞到;
- 配置定时器1,四路PWM输出。1-3路为IHM07M1的mos管开关输入,该驱动不需要互补输出,第四路PWM用做触发ADC采样,不需要输出。具体配置如下图:

stm32g474主频为170M,定时器1主频也为170M,这里配置PWM中心对齐加6分频,实际的PWM频率为:
C
L
K
P
W
M
=
定时器主频
(
P
r
e
s
c
a
l
e
r
+
1
)
∗
2
=
12.14
K
CLK_{PWM} = \frac{定时器主频}{(Prescaler+1)*2} = 12.14K
CLKPWM=(Prescaler+1)∗2定时器主频=12.14K
计数值这里暂定1K吧。
Trigger Output(TRGO)配置为 OC4REF,即为第四通道的比较输出功能。作为下文ADC采集的硬件触发功能。这样可以根据实际情况通过改变PWM通道的占空比灵活配置采样时刻。
-
生成代码后,还需要手动开启PWM输出:
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1); HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2); HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_3); HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_4); -
还需要开启UART功能,通过上位机Vofa+ 可以观察数据波形。开启功能简单叙述:


由于需要借助VOFA+软件观察波形,所以还需要简单的通信协议;
定义发送缓冲区:
char buff[3*4+4] = {0x00, 0x00,0x00, 0x00,0x00, 0x00,0x00, 0x00,0x00, 0x00,0x00, 0x00,0x00,
0x00, 0x80, 0x7f};
填充数据:
*(float*)buff = MotorM1.CurVelocity;
*((float*)buff+1) = MotorM1.CurPosition;
*((float*)buff+2) = 0;
发送数据:
HAL_UART_Transmit_DMA(&huart2,(uint8_t *)&buff,sizeof(buff));
2、开环运行

开环运行原理图如上;只需要左侧三个参数即可让电机动起来;其中 V_d = 0; θ 为自增变量;V_q为一个较小的任意值;下面贴出关键函数的实现:
SVPWM:
void Motor::SvpwmTransform(Ualpha_beta_t vol, Dabc_t* duty)
{
uint32_t timelimit = sqrt3 * 1000 / 2;
uint32_t t0 = 0, t1 = 0, t2 = 0;
uint8_t sectiontable[] = { 0, 2, 6, 1, 4, 3, 5, 0 };
int32_t U1 = vol.beta;
int32_t U2 = (sqrt3 * vol.alpha - vol.beta) / 2;
int32_t U3 = -(sqrt3 * vol.alpha + vol.beta) / 2;
int16_t ta = 0, tb = 0, tc = 0;
uint8_t a = U1 > 0 ? 1 : 0;
uint8_t b = U2 > 0 ? 1 : 0;
uint8_t c = U3 > 0 ? 1 : 0;
uint8_t n = 4 * c + 2 * b + a;
//CurSector = sectiontable[n];
switch (sectiontable[n]) {
case 1:
t1 = U2;//4
t2 = U1;//6
break;
case 2:
t1 = -U3;//6
t2 = -U2;//2
break;
case 3:
t1 = U1;//2
t2 = U3;//3
break;
case 4:
t1 = -U2;//3
t2 = -U1;//1
break;
case 5:
t1 = U3;//1
t2 = U2;//5
break;
case 6:
t1 = -U1;//5
t2 = -U3;//4
break;
default:
break;
}
//最大到六边形的内切圆,
if (t1 + t2 > timelimit) {
uint32_t temp = t1 + t2;
t1 = t1 * (timelimit) / temp;
t2 = t2 * (timelimit) / temp;
}
t0 = (timelimit - t1 - t2) >> 1;
switch (sectiontable[n]) {
case 1:
ta = t0 >> 1;
tb = (t0 + t1) >> 1;
tc = (t0 + t1 + t2) >> 1;
break;
case 2:
ta = (t0 + t2) >> 1;
tb = t0 >> 1;
tc = (t0 + t1 + t2) >> 1;
break;
case 3:
ta = (t0 + t1 + t2) >> 1;
tb = t0 >> 1;
tc = (t0 + t1) >> 1;
break;
case 4:
ta = (t0 + t1 + t2) >> 1;
tb = (t0 + t2) >> 1;
tc = t0 >> 1;
break;
case 5:
ta = (t0 + t1) >> 1;
tb = (t0 + t1 + t2) >> 1;
tc = t0 >> 1;
break;
case 6:
ta = t0 >> 1;
tb = (t0 + t1 + t2) >> 1;
tc = (t0 + t2) >> 1;
break;
default:
break;
}
duty->a = ta;
duty->b = tb;
duty->c = tc;
}
更新占空比:
Dabc_t Motor::UpdateDuty(void)
{
int ccr_limit = 1000;
Dabc_t duty = { 0,0,0 };
duty.a = MotorM1.Duty.a / 1000;
duty.b = MotorM1.Duty.b / 1000;
duty.c = MotorM1.Duty.c / 1000;
if(MotorM1.Enable)
{
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1,duty.a * ccr_limit);
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_2,duty.b * ccr_limit);
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_3,duty.c * ccr_limit);
}
else
{
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1,duty.a * 0);
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_2,duty.b * 0);
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_3,duty.c * 0);
}
return duty;
}
连接好驱动板、控制板、电机,如果硬件没有问题应该就可以缓慢的转动了。可以适当调节Vq和θ的值。同时配合示波器观察实际输出。逐步排查问题,常见的问题如:驱动没有使能,没有供电,相关硬件保护被触发,跳线帽不正确,导线连接问题等。
实际占空比的波形如下:(vd = 200, θ += 0.001)

开环转动过程中可能会伴随着电机的噪声、抖动,驱动的发热等,均为正常现象,该步骤只是暂时的过渡阶段,仅用于验证代码和硬件。下面着手实现闭环:
3、电流检测
硬件原理
IHM07M1驱动采样电路简图:
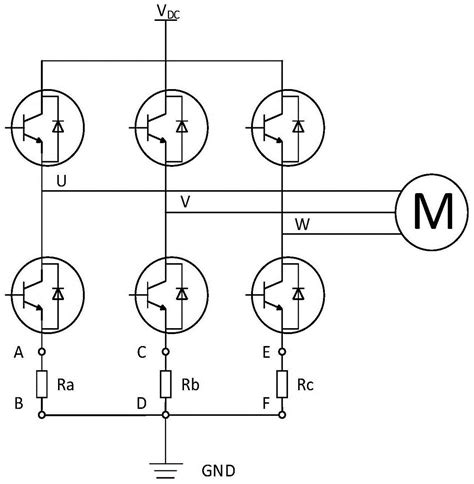
其中 Ra、Rb、Rc为采样电阻。由原理图知:只有对应相的下桥臂打开时才能测量该相的电流。否则没有电流经过测量无意义。同时该驱动板支持三电阻采样。

每个采样电阻阻值为0.33欧姆。

三路电流采样电路相同,放大倍数已经标注为1.53倍。电流采样非常简单,即使用采样电阻串联在电机某相回路中,通过测量单片机ADC采样电阻两端电压,由于采样电阻阻值已知,可以通过欧姆定律反推实际电流:
I
相电流
=
U
采样电阻两端电压
R
采样电阻阻值
∗
放大倍数
I_{相电流} = \frac{U_{采样电阻两端电压}}{R_{采样电阻阻值}* 放大倍数}
I相电流=R采样电阻阻值∗放大倍数U采样电阻两端电压
软件原理
由于ADC采样在每个PWM周期,速度很快(12.14K),为节约CPU资源一般是使用DMA的,在DMA完成中断回调中进行计算和处理。
其中ADC配置如下图示,配置仅做参考。
通道1和通道7对应PA0和PC1,这两个GPIO连接了采样电流运放的输出。所以只能配置这两个通道。

其中外部触发源一定选择 Timer 1 Trigger Out Event,该触发源对应前文叙述的PWM通道4。

DMA功能也非常重要,12位ADC只能开启半字传输,也就是16位传输,同时开启循环模式,这样会自动更新索引并覆盖之前的数据。

配置完成后还需要手动开启:
uint16_t ADC_result[3] ; // ADC缓冲区
HAL_ADC_Start_DMA(&hadc1, (uint32_t*)ADC_result, 2); //开启传输
同时设置定时器1第四通道的比较值:
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_4,950);
在DMA中断回调中计算电机相电流:
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc)
{
if(hadc->Instance==ADC1)
{
MotorM1.PhaseCurr.a = (ADC_result[0] - 1910) * 3.3 / 4096 / 1.528 / 0.33;
MotorM1.PhaseCurr.b = (ADC_result[1] - 1910) * 3.3 / 4096 / 1.528 / 0.33;
MotorM1.PhaseCurr.c = -MotorM1.PhaseCurr.a - MotorM1.PhaseCurr.b;
HAL_GPIO_TogglePin(USER_LED_GPIO_Port, USER_LED_Pin); //翻转LED观察测量时刻是否正常
}
}
采样电阻两端的电压计算公式为:
U
采样电阻
=
(
采样值
−
校零值
)
3.3
4096
U_{采样电阻} = (采样值 - 校零值) \frac{3.3}{4096}
U采样电阻=(采样值−校零值)40963.3
将采样电阻的电压带入上文的相电流计算公式即得到电机相电流,计算前两相电流后,可以通过基尔霍夫定律得到第三相电流。
通过逻辑分析仪观察实际电流采样时刻:


可以看到;周期结束和开始时进行LED翻转,而LED翻转在DMA中断回调中进行,该配置与预期相符。
通过Vofa上位机观察实际的三相电流:

可以看到电流三相对称,与预期相符。
实际的电机电流可能有抖动、震荡,如下图:

这样需要根据实际情况修改采样时刻,在电流稳定的时刻进行采样。
4、电流闭环运行
将采样电流与目标电流进行误差控制,实现电流环控制,将电流环控制程序放在定时器1的溢出中断。每个PWM周期进行一次电流采样,采样后进行PI控制,同时调整下一周期的PWM占空比。θ依然为自增变量,目标电流与前文V_d、V_q相同。部分代码如下:
motor_t theta = 0;
void FOC_ControllerM1()
{
Ialpha_beta_t cur_two;
Ialpha_beta_t vol_two;
Idq_t cur_rotate;
Idq_t vol_rotate;
theta += 0.001;
if (theta > 2 * Pi)
{
theta -= 2 * Pi;
}
if(theta < - 2 * Pi)
{
theta += 2 * Pi;
}
cur_two = Clark_Transform(MotorM1.PhaseCurr);
cur_rotate = Park_Transform(cur_two, theta);
vol_rotate.d = PIDCtrlBlock(MotorM1.TargetCurr.d, cur_rotate.d*1000, &pid_Id);
vol_rotate.q = PIDCtrlBlock(MotorM1.TargetCurr.q, cur_rotate.q*1000, &pid_Iq);
vol_two = Inverse_Park_Transform(vol_rotate, theta);
MotorM1.SvpwmTransform(vol_two, &MotorM1.Duty);
MotorM1.UpdateDuty();
}
PI控制器的参数需要调整到比较稳定的数值,因为接下来是速度环,需要先将电流环稳定才行。
5、速度闭环运行
霍尔信号检测速度和位置,其实就是根据三个霍尔信号来判断的。根据三个信号的高低电平,霍尔信号分为 5->1->3->2->6->4 六个状态,并按照这样的顺序依次变化,反转就是逆序的变化。如图,120度摆放的霍尔传感器,每60度就会变化一次状态。

HALL捕获配置
将定时器配置为HALL Sensor Mode 模式。三个通道就会连接在一起,当三个通道状态变化时,就会发生中断。
软件中有两个点需要注意:
-
HALL Sensor Ratio 2分频后,只有上升沿触发中断。不分频则是上升沿下降沿都会中断。
-
HALL开启溢出中断,可以设置中断源,设置为只有计数器上/下溢才中断,否则会在每次HALL中断都触发溢出中断。

HAL_TIMEx_HallSensor_Start_IT(&htim2); //开启HALL中断 __HAL_TIM_ENABLE_IT(&htim2, TIM_IT_UPDATE);//开启更新中断 __HAL_TIM_URS_ENABLE(&htim2); //设置中断源为溢出中断 重写输入捕获中断回调; void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) { // 中断中,读取HALL的三个信号的状态; // 通过判断HALL状态的顺序,判断正反转。 // HALL状态对应了转子的位置;因为每次中断电机转动60度,所以实际位置 = 上一次位置 +(反转-) 60度; // 每次中断都需要读取通道1的捕获值;中断会中断清空计数值; // 捕获值记录了该次中断与上次中断的时间间隔;由此可以计算速度;因为每次中断都代表电机转动了60度,可以计算出瞬时速度; }
速度闭环
上面已经得到了离散的六个霍尔位置,并且计算得到了速度;
此时,开环运行的θ就不需要自加了。该位置信息为 六个离散的位置加对瞬时速度的积分,积分时间为FOC速度环的控制周期;
inter = ((float)(MotorM1.CurVelocity)* 2.0f * Pi ) / 60000.0f ;
//速度单位为转每分,转化为弧度,除60000后变为 1ms 经过的弧度。
theta = (float)MotorM1.CurPosition/(65536*2π) + inter;
//65535为霍尔定时器的计算器装载值;
速度环的执行频率暂定为1K。
至此,只需要调节PID的参数,即可实现正常运行。

实测轻松达到万转;
但是PID参数还是需要细调,速度不是一直很平稳。
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









