







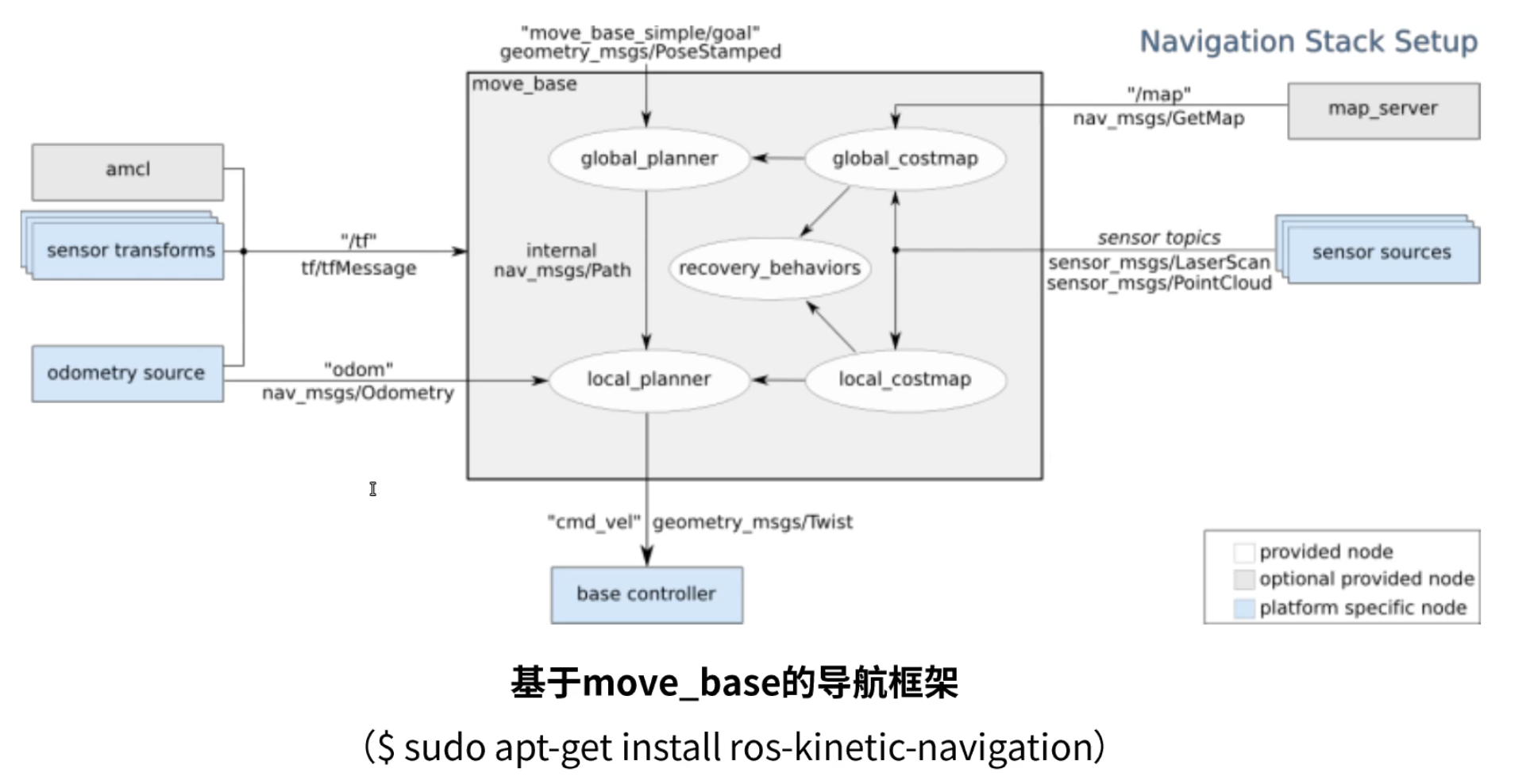
一、导航框架–move_base
move_base:利用A*算法或Dikjstra算法实现全局最优路径规划
在本地实时规划中
- 规划机器人每个周期内的线速度、角速度。使之尽量符合全局最优路径
- 实时避障
- Trajectory Rollout 和Dynamic Window Approaches算法
- 搜索躲避和行进的多条路径,综合各评价标准选取最优路径
 配置节点
配置节点
mbot_navigation/launch/move_base.launch
二、导航框架–amcl
使用孟特卡罗定位方法实现二维环境定位,针对已有地图使用粒子滤波器追踪一个机器人的姿态
- 里程计定位:只通过里程计的数据来处理/base和/odom之间的TF转换;
- amcl:可以估算机器人在地图坐标系/map下的位姿信息,提供/base、/odom、/map之间的TF变换
三、连接
下午分别尝试利用有线和无线连接机器人,有线连接没什么问题,无线连接时需要连接到机器人的热点才能连接成功。
但是找到一篇博客可以更好的实现无限远程连接,但是在修改文件时又出现了错误,然后找了一个树莓派先试,在进行最后的连接测试的时候发现那个树莓派没有ros环境,给它安装ros时又出错。。。。。然后又去尝试重新连接机器人,发现又连接不上了。。。。。。。。。累了。。。。明天在试一试吧。。。。。。















 1276
1276











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









