






 无刷直流电机(BLDC)是一种使用直流电源、通过逆变器转换成三相交流电驱动的同步电机,常用于需要高效率和精确控制的场合。FOC(磁场定向控制)是其高效控制方法,提供更平滑的扭矩、低噪音和高效率。电机主要由永磁转子、线圈定子和可能的位置传感器组成,通常使用霍尔传感器检测转子位置。无刷电机的优点包括高输出功率、效率和动态响应,但需要复杂的驱动电路和控制器。
无刷直流电机(BLDC)是一种使用直流电源、通过逆变器转换成三相交流电驱动的同步电机,常用于需要高效率和精确控制的场合。FOC(磁场定向控制)是其高效控制方法,提供更平滑的扭矩、低噪音和高效率。电机主要由永磁转子、线圈定子和可能的位置传感器组成,通常使用霍尔传感器检测转子位置。无刷电机的优点包括高输出功率、效率和动态响应,但需要复杂的驱动电路和控制器。
无刷直流电机
《无感无刷直流电机之电调设计全攻略》
无刷直流电机(BLDC:Brushless Direct Current Motor),也被称为电子换向电机(ECM或EC电机)或同步直流电机,是一种使用直流电(DC)电源的同步电机。无刷直流电机实质上为采用直流电源输入,并用逆变器变为三相交流电源,带位置反馈的,永磁同步电机。
PMSM是Permanent-magnet Synchronous Motor的缩写,即永磁同步电机。它的工作原理是定子通交流电产生旋转磁场,转子为永磁体,定子产生的磁场带动永磁体旋转,转速为同步转速。永磁同步电机具有功率密度和工作效率高、惯性低、体积小、响应速度快且调速范围广等优点。PMSM可以以与电源频率同步的恒定速度进行旋转,而不受负载和线路电压的影响。
FOC是Field-Oriented Control的缩写,直译为磁场定向控制,也称为矢量控制(VC,Vector Control)。它是一种高效控制无刷直流电机(BLDC)和永磁同步电机(PMSM)的方法,通过精确地控制磁场大小与方向,使得电机的运动转矩平稳、噪声小、效率高,并且具有高速的动态响应。FOC可以让我们对无刷电机进行“像素级”控制,实现很多传统电机控制方法所无法达到的效果。
无刷直流电机主要由用永磁材料制造的转子、带有线圈绕组的定子和位置传感器(可有可无)组成。
BLDC电机的定子结构与感应电机相似。它由堆叠的钢叠片组成,并带有轴向切槽以用于缠绕。BLDC中的绕组与传统感应电机的绕组略有不同。
BLDC电动机的转子部分由永磁体(通常是稀土合金磁体,例如钕(Nd),钐钴(SmCo)和钕铁硼(NdFeB)组成。
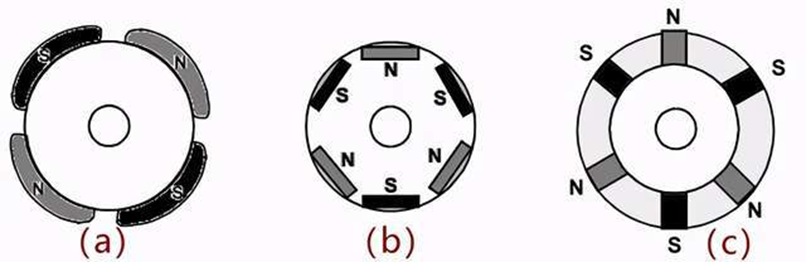
根据应用,极数可以在2到8个之间变化,北极(N)和南极(S)交替放置。下图显示了磁极的三种不同布置。
(a):磁体放置在转子的外周上。
(b):称为电磁嵌入式转子,其中矩形永磁体嵌入转子的铁心中。
(c):将磁体插入转子的铁芯中。
由于BLDC电机中没有电刷,因此换向是电子控制的。为了使电机旋转,必须顺序地给定子绕组通电,并且必须知道转子的位置(即转子的北极和南极)才能精确地给一组特定的定子绕组通电。
通常使用霍尔传感器(根据霍尔效应原理工作)的位置传感器来检测转子的位置并将其转换为电信号。大多数BLDC电机使用三个霍尔传感器,这些传感器嵌入到定子中以检测转子的位置。
霍尔传感器的输出将是高电平还是低电平,这取决于转子的北极是南极还是北极附近。通过组合三个传感器的结果,可以确定通电的确切顺序。
(2)无刷直流电机的工作原理
顾名思义,无刷直流电机不使用电刷。无刷直流电机不利用换向器来调节线圈内部的电流,而是使用电子换向器来传递电流,该电流产生交流电信号,从而导致电机驱动。
无刷直流电机的工作原理与有刷直流电机相似。洛伦兹力定律指出,只要载流导体置于磁场中,它就会受到作用力。由于反作用力,磁体将承受相等且相反的力。当线圈中通过电流后,会产生磁场,该磁场被定子的磁极所驱动,同极性相互排斥,异极性相互吸引,如果持续改变线圈中电流的方向的话,那么转子所感应出磁场的磁极也会持续发生变化,那么转子就会在磁场的作用下一直转动。
在BLDC电机中,载流导体(定子)是固定的,而永磁体(转子)是运动的。
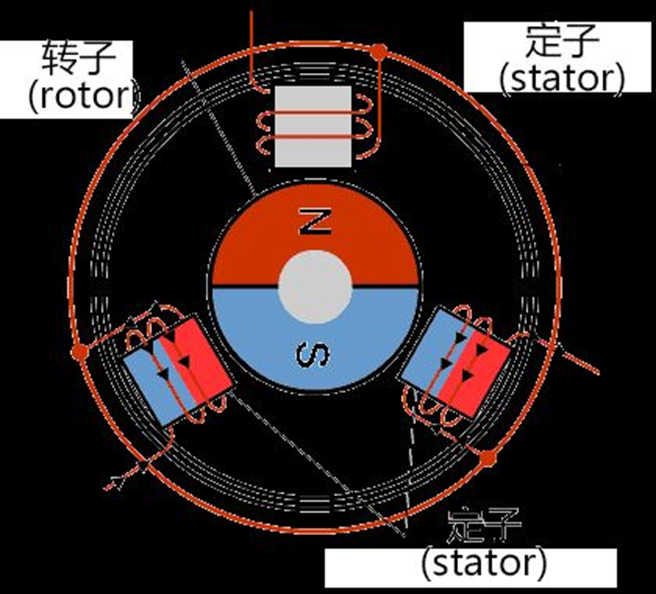
当定子线圈从电源获得电源时,它就变成电磁体并开始在气隙中产生均匀的磁场。尽管电源是直流电,但开关仍会产生具有梯形形状的交流电压波形。由于电磁定子和永磁转子之间的相互作用力,转子继续旋转。
通过将绕组切换为高和低信号,相应的绕组被激励为北极和南极。带有南极和北极的永磁转子与定子极对齐,从而导致电机旋转。
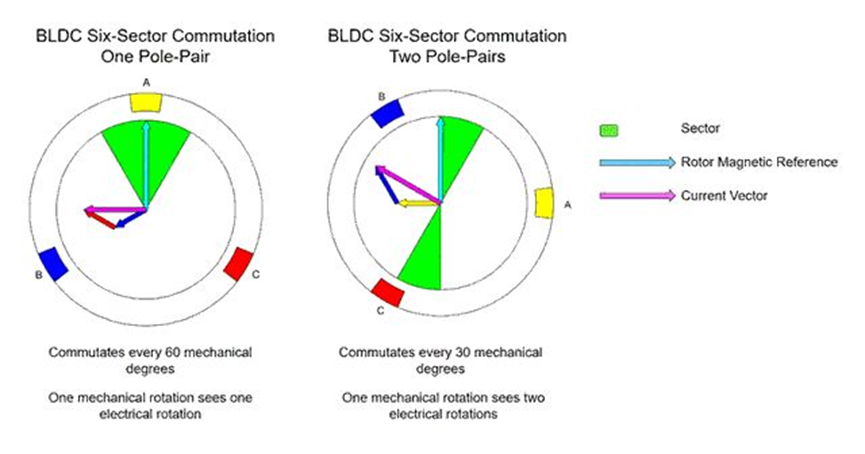
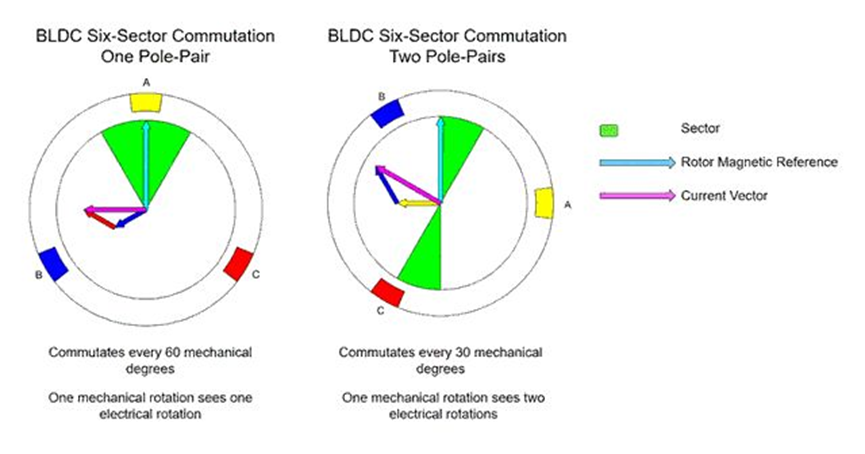
一对极和两对极的 BLDC 电机运行动图
无刷直流电机有三种配置:单相,两相和三相。其中,三相BLDC是最常见的一种。
(3)无刷直流电机的驱动方法
无刷直机电机的驱动方式按不同类别可分多种驱动方式,它们各有特点。
按驱动波形:方波驱动,这种驱动方式实现方便,易于实现电机无位置传感器控制;
正弦驱动:这种驱动方式可以改善电机运行效果,使输出力矩均匀,但实现过程相对复杂。同时,这种方法又有SPWM和SVPWM(空间矢量PWM)两种方式,SVPWM的效果好于SPWM。
(4)无刷直流电机的优点与局限性
优点:
高输出功率
小尺寸和重量
散热性好、效率高
运行速度范围宽
低电噪声
高可靠性和低维护要求
高动态响应
电磁干扰少
局限性:
控制该电机所需的电子控制器很昂贵
需要复杂的驱动电路
需要额外的位置传感器(FOC不用)
(5)无刷直流电机的应用
无刷直流电机广泛用于各种应用需求,例如工业控制,汽车,航空,自动化系统,医疗保健设备等领域中的各种负载,恒定负载和定位应用。
工作原理的区别:
有刷电机采用机械换向,磁极不动,线圈旋转。有刷电机的主要结构就是定子+转子+电刷,通过旋转磁场获得转动力矩,从而输出动能。电刷与换向器不断接触摩擦,在转动中起到导电和换相作用。
无刷电机采取电子换向,线圈不动,磁极旋转。无刷直流电机由电机主体和驱动器组成,是一种典型的机电一体化产品。无刷电机通过霍尔元件,感知永磁体磁极的位置,根据这种感知,使用电子线路,适时切换线圈中电流的方向,保证产生正确方向的磁力,来驱动电机。
怎么确定转子的位置?
(1)硬件比较器法
(2)软件端电压采样法
如何确定转子的起始位置?
(1)上电后进行一个转子强制复位操作;
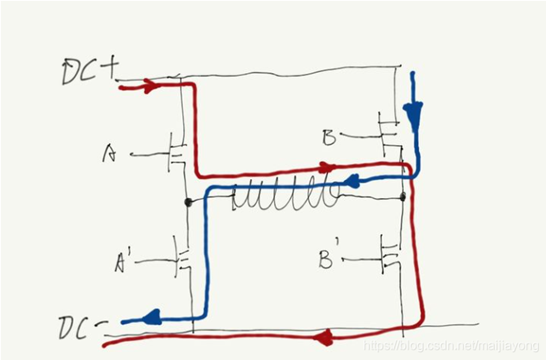
在上面的H桥驱动电路上桥臂和下桥臂在同一时间只有一个能打开,这是为什么呢?因为两个同时打开就短路了。所以这种情况是不允许发生的。
正是为了避免上面的情况发生,所以才有了**死区**时间的概念,死区时间是PWM输出时,为了使H桥或半H桥的上下管不会因为开关速度问题发生同时导通而设置的一个保护时段,所以在这个时间,上下管都不会有输出。
现在我们已经知道我们需要的是什么了?**那就是一个旋转任意角度的磁场并且大小可控**,但是由上面描述三相线圈只能生成6个方向的电压矢量(电压矢量的方向和磁场方向相同),那么如何根据这6个电压矢量合成任意角度的电压矢量(磁场方向)呢?这就是SVPWM要干的事情了
在FOC控制中主要用到三个PID环,从内环到外环依次是:**电流环**、**速度环**、**位置环。**
也就是说:我们**通过电流反馈来控制电机电流(扭矩)** -> 然后**通过控制扭矩来控制电机的转速** -> 再**通过控制电机的转速控制电机位置**。
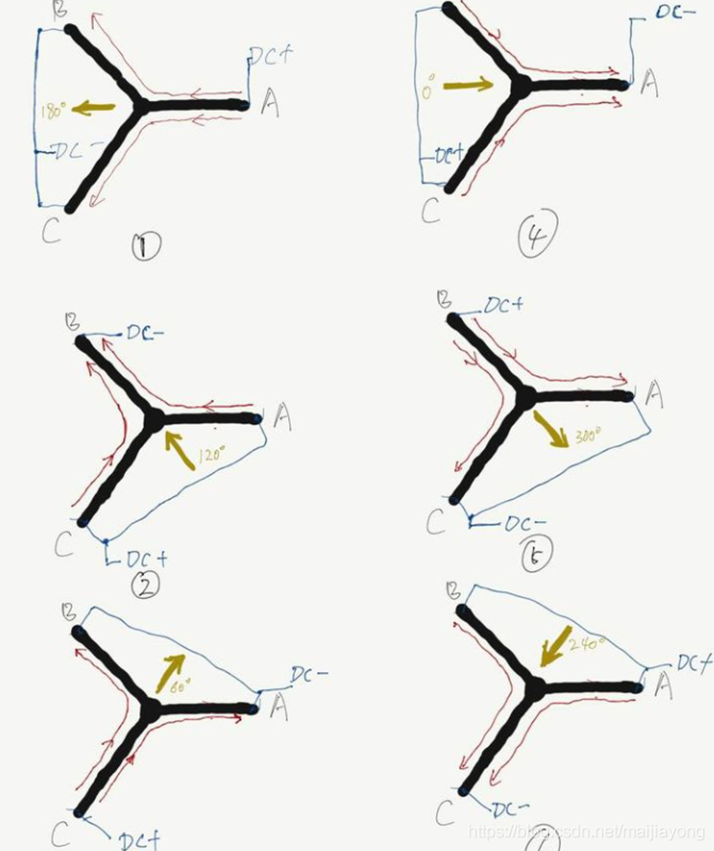
SVPWM:空间矢量脉宽调制(Space Vector Pulse Width Modulation)
SVPWM的基本思想就是根据上面6个磁场方向的来合成任意角度的磁场方向
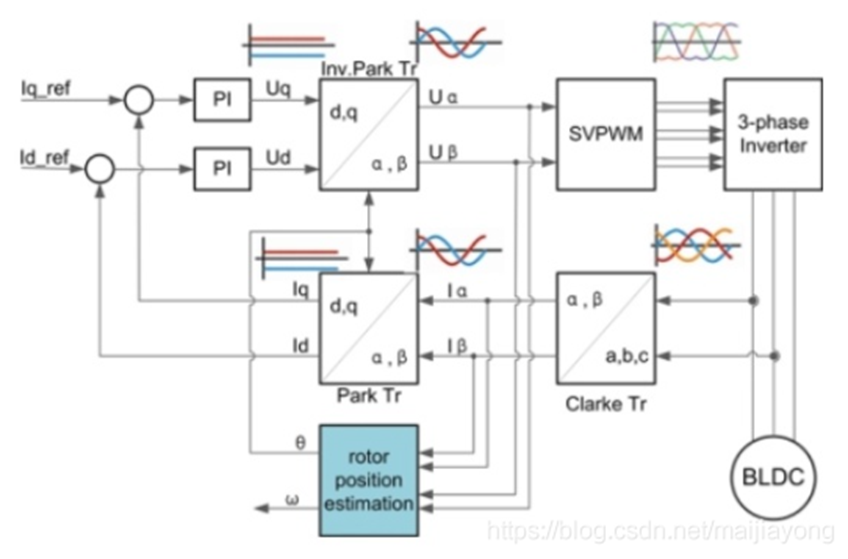
FOC控制的整个过程是这样的:
1. 对电机三相电流进行采样得到Ia Ib Ic
2. 将Ia、Ib、Ic经过`Clark变换`得到Iα Iβ
3. 将Iα Iβ经过`Park变换`得到Iq和Id
4. 计算Iq和Id和其设定值Iq_ref,Id_ref 的误差
5. 将上述误差输入两个PID(只用到PI)控制器,得到输出的控制电压Uq,Ud
6. 将 进行`反Park变换`得到Uα,Uβ
7. 用Uα,Uβ合成电压空间矢量,输入`SVPWM模块`进行调制,输出该时刻三个半桥的状态编码值
8. 按照前面输出的编码值控制三相逆变器的MOS管开关,驱动电机
9. 循环上述步骤

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









