







0、前言
经过了之前的学习,我们能够表现直线、平面,接下来的几何部分,就是关于如何表示曲线、曲面的部分,首先,几何有两种表示方法,一种的隐式表示,一种是显式表示,类似于数学中的隐函数与显函数的关系,隐式表示虽然无法精确的获得每一个点的对应关系,但通常对于判断某一给定的点是否在曲线上或曲面上(内外)十分方便,显示表示则是直接用方程表示了每一个点的映射关系,但对于判断某点是否在曲线上或曲面上有时十分困难。因此,具体使用哪种表示方法需要根据现实情况决定。
1、几何的隐式表示
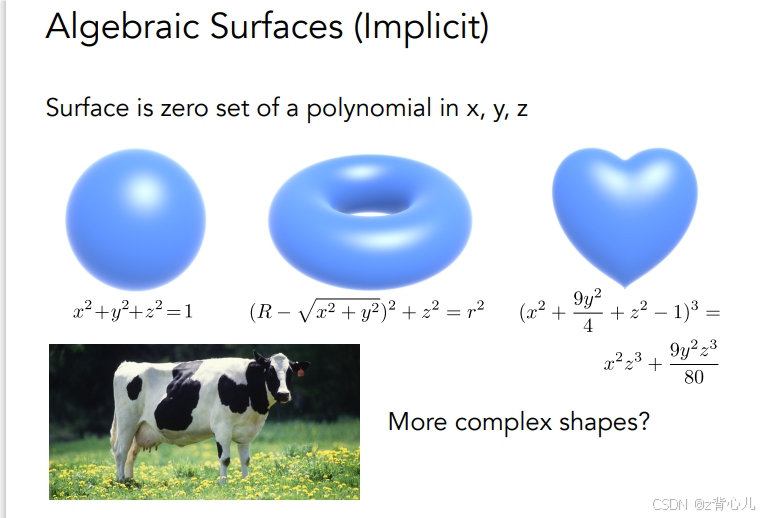
1.1 几何表面
此种方法使用一方面来表示几何表面,但能表示的几何表面通常比较简单,如下所示
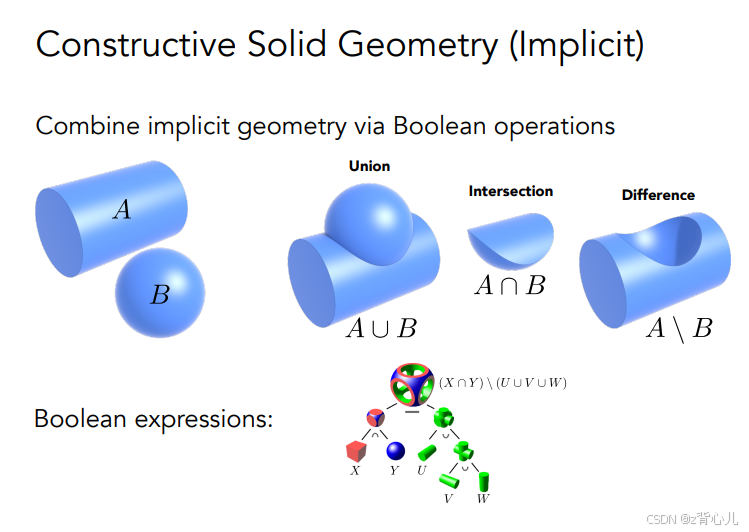
1.2 CSG(Constructive Solid Geometry)
通过布尔表达式(逻辑关系)来组合物体进行表示,如下所示
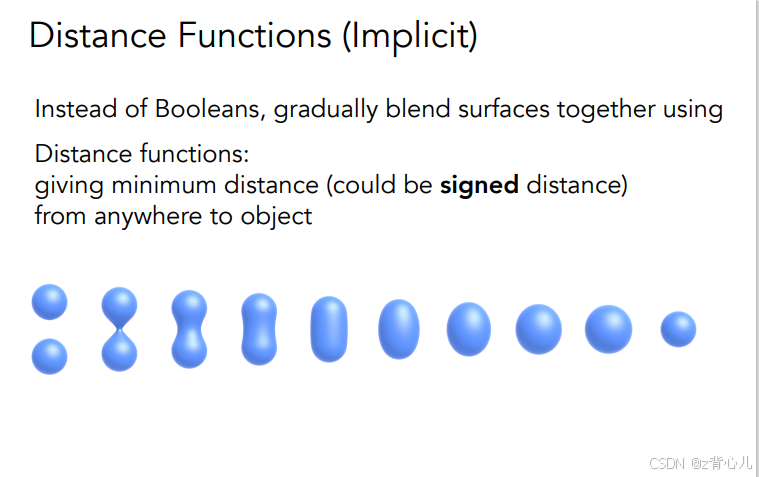
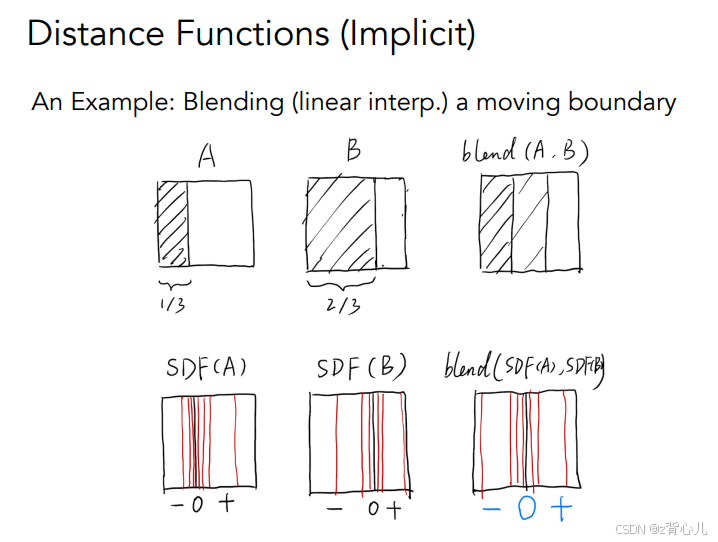
1.3 距离函数(Distance Function)
距离函数定义为某一点到物体表面的最短距离,通过将某点到两个(或多个)物体的距离函数进行融合,再通过融合后的距离函数反向推导即可得到融合后的物体,如下所示。
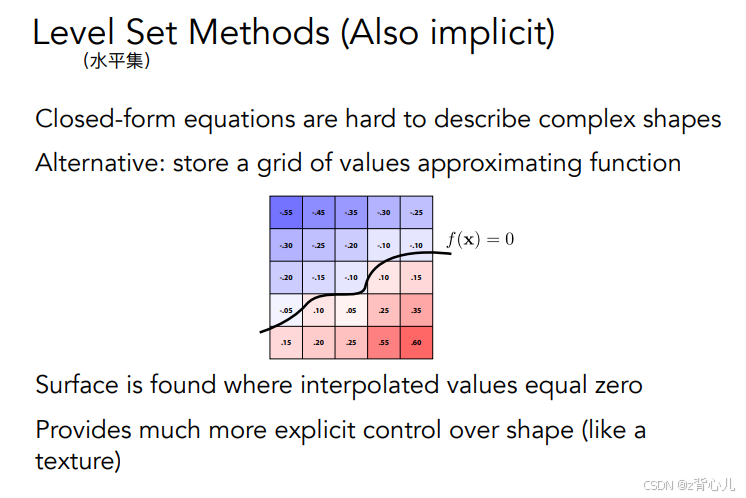
1.4 水平集(Level Set Method)
与1.1几何表面类似,只是将方程表示改为了用矩阵表示
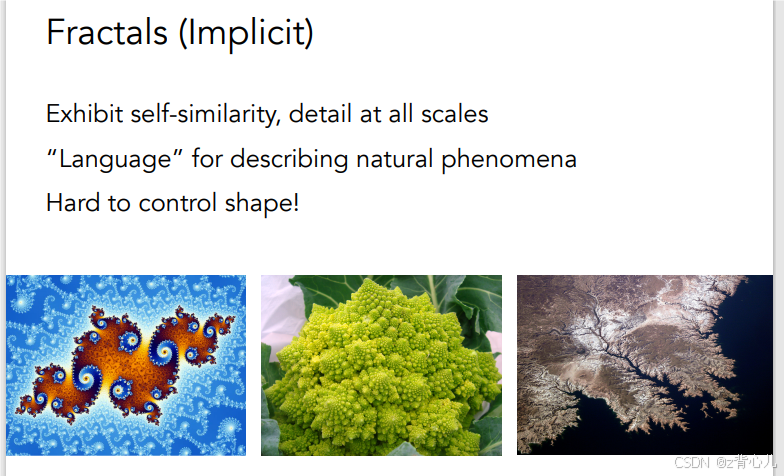
1.5 分形——自相似(Fractals)
用自己表示自己,使用自己的复制体无限组合
2、几何的显式表示
几何的显式表示同样有很多方法,如多边形面(Polygon Mesh)、点云(Point Cloud)等等,下面重点介绍贝塞尔曲线,和贝塞尔曲面。
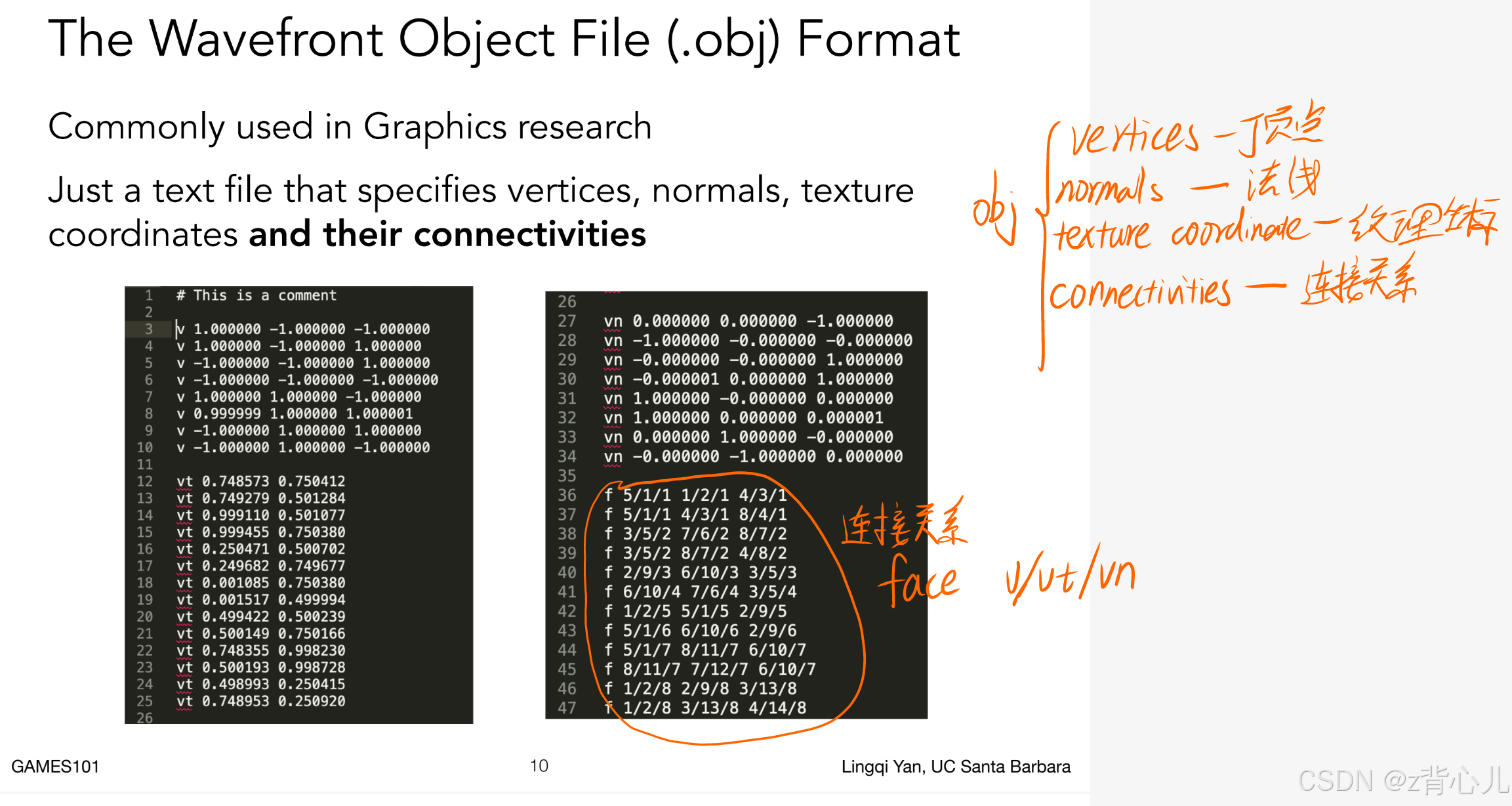
此外,额外补充一下.obj格式存储的数据内容,可分为四部分,分别是顶点坐标、法线、纹理坐标以及他们之间的连接关系,如下所示
2.1 贝塞尔曲线(Bezier Curves)
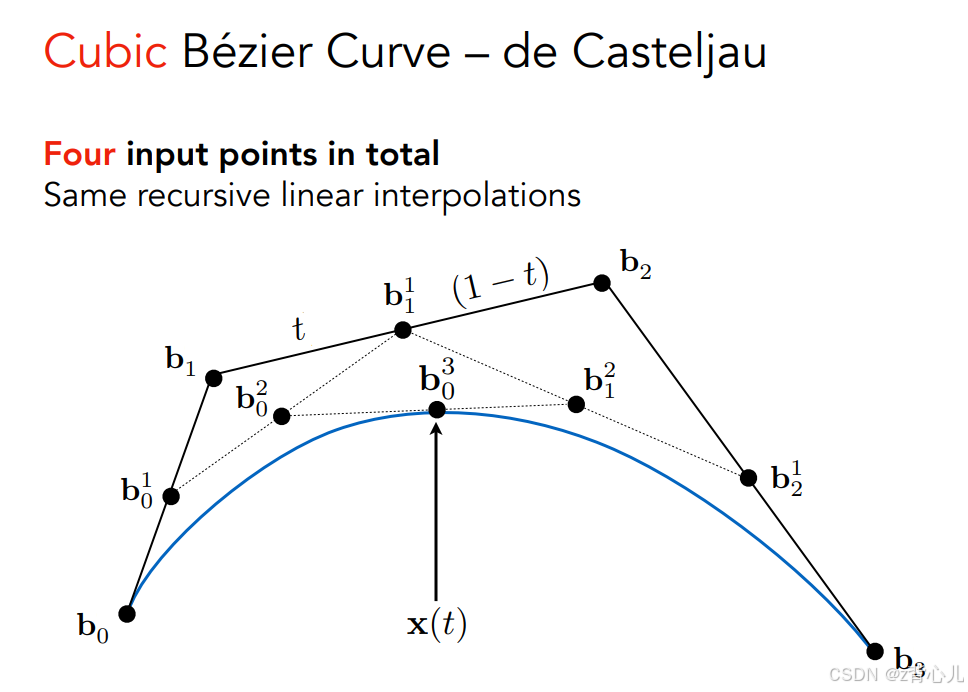
2.1.1 构造过程
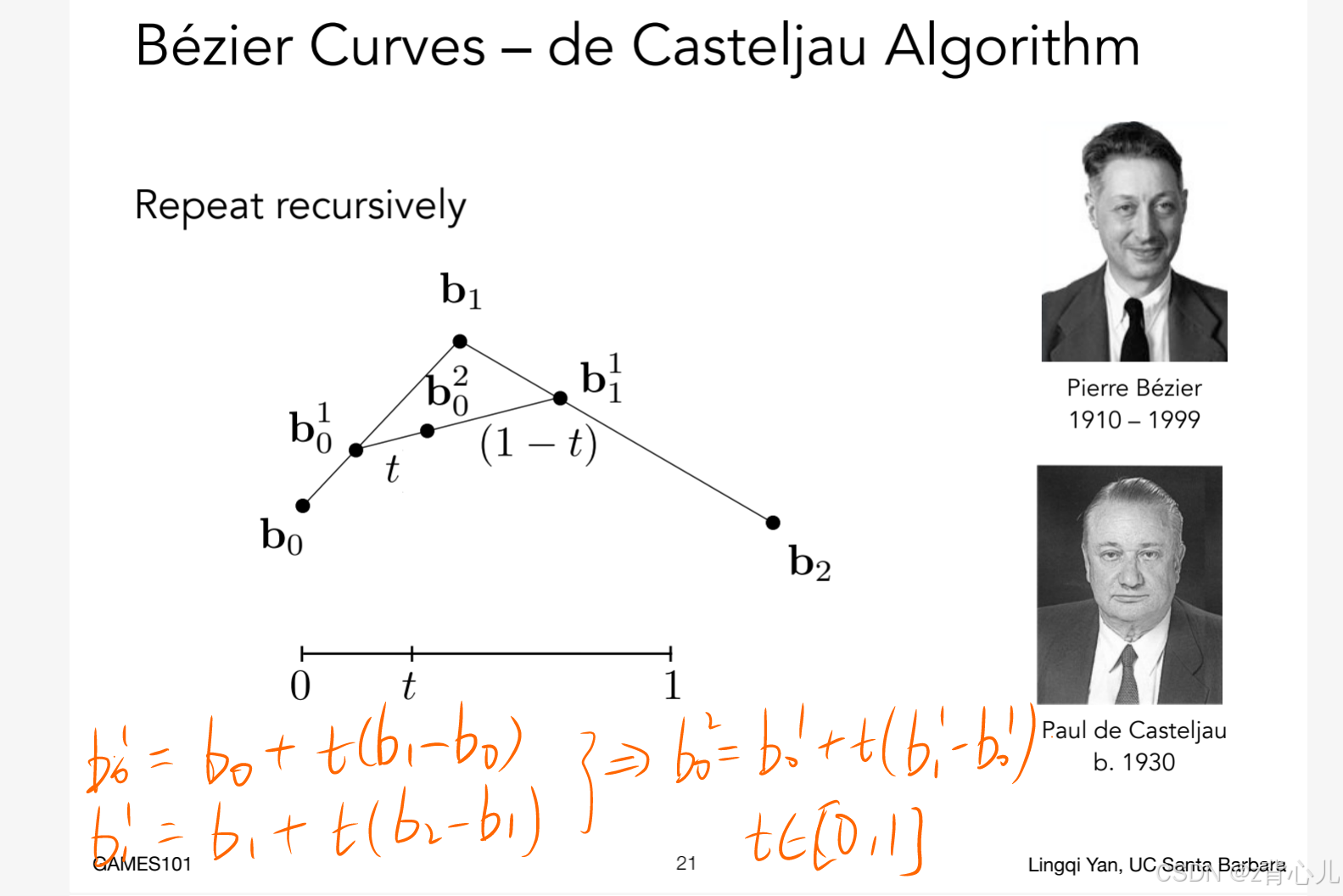
贝塞尔曲线是通过一系列控制点构造出曲线的过程,构造过程如下,以三个控制点为例:
1、首先,曲线的起点和终点与控制点的起点与重点相同;
2、曲线起点与终点的切线方向满足
t
0
=
3
(
b
1
−
b
0
)
t_0 = 3(b_1-b_0)
t0=3(b1−b0),
t
1
=
3
(
b
2
−
b
1
)
t_1=3(b_2-b_1)
t1=3(b2−b1)
3、接下来,在
b
0
b
1
b_0b_1
b0b1两点之间做lerp得到
b
0
1
b_0^1
b01,
b
1
b
2
b_1b_2
b1b2两点之间做lerp得到
b
1
1
b_1^1
b11,再在
b
0
1
b_0^1
b01
b
1
1
b_1^1
b11两点之间做lerp即可得到曲线。
四个控制点与三个点方法一致,只是多了几次lerp操作
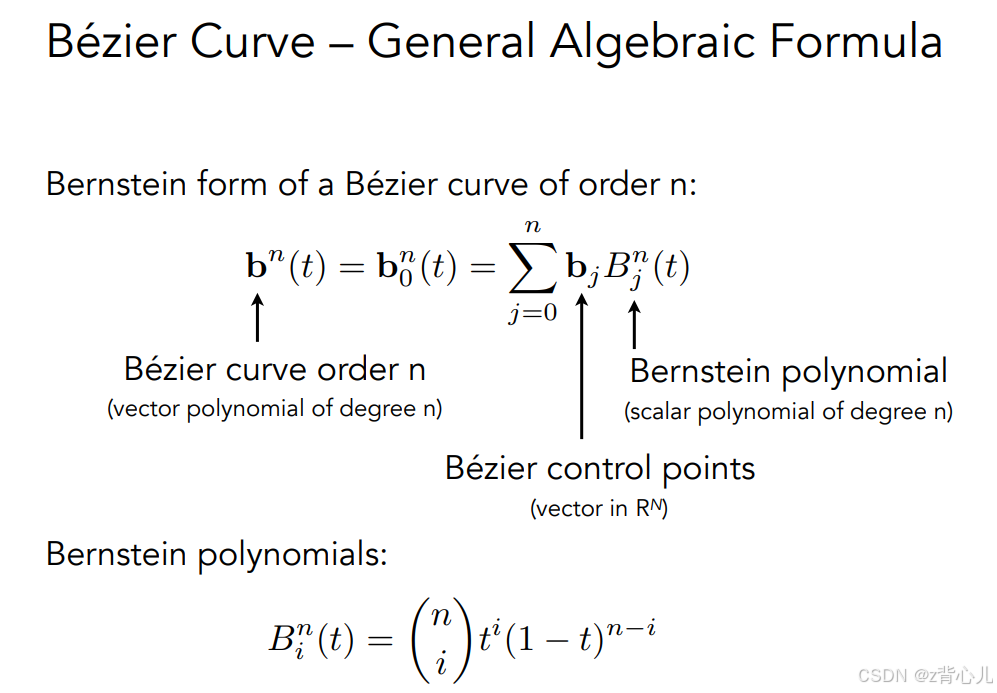
2.1.2 贝塞尔曲线的公式表达
增加控制点数目,推导可得贝塞尔曲线的公式可表示为
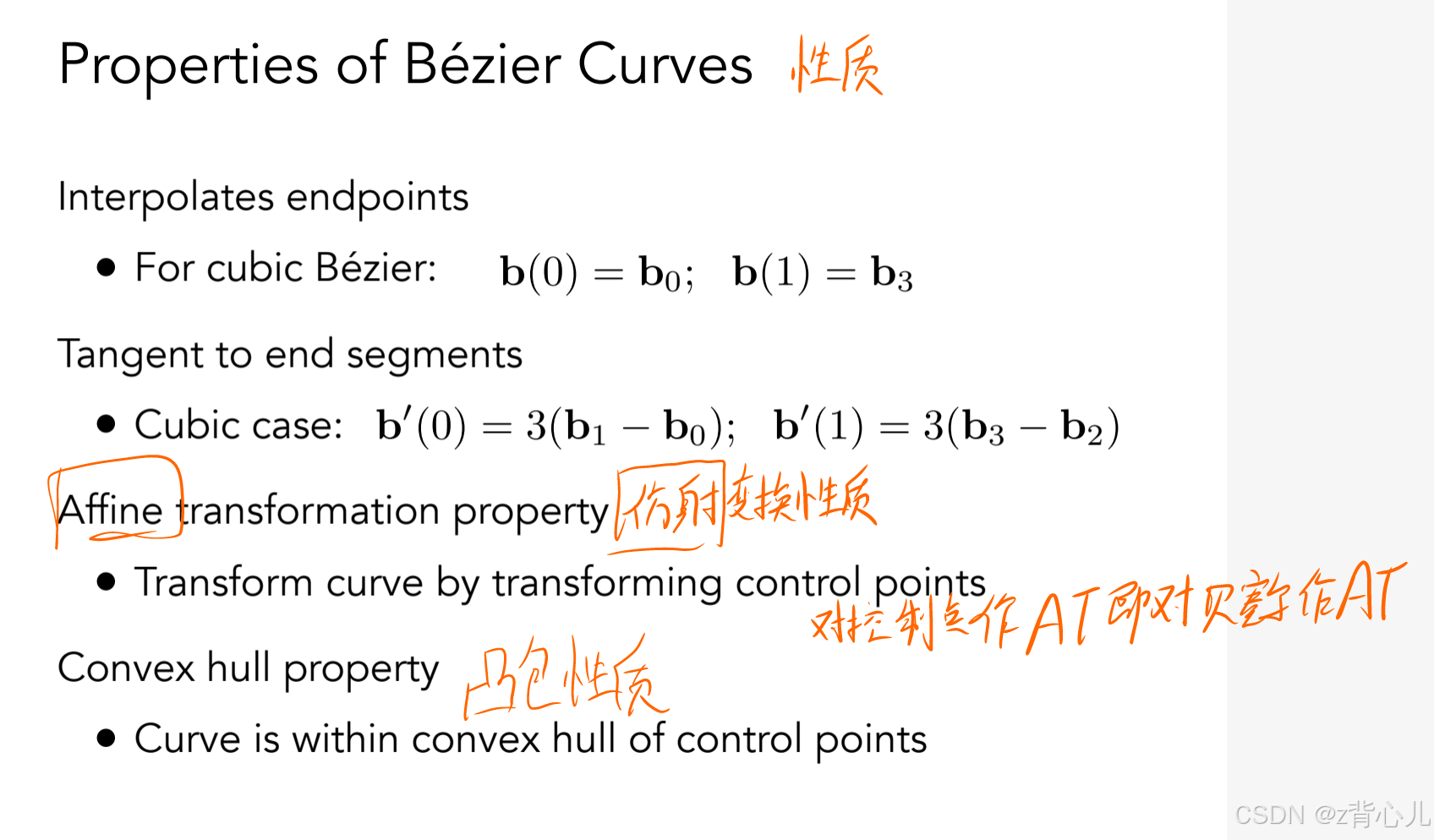
2.1.3 贝塞尔曲线的性质
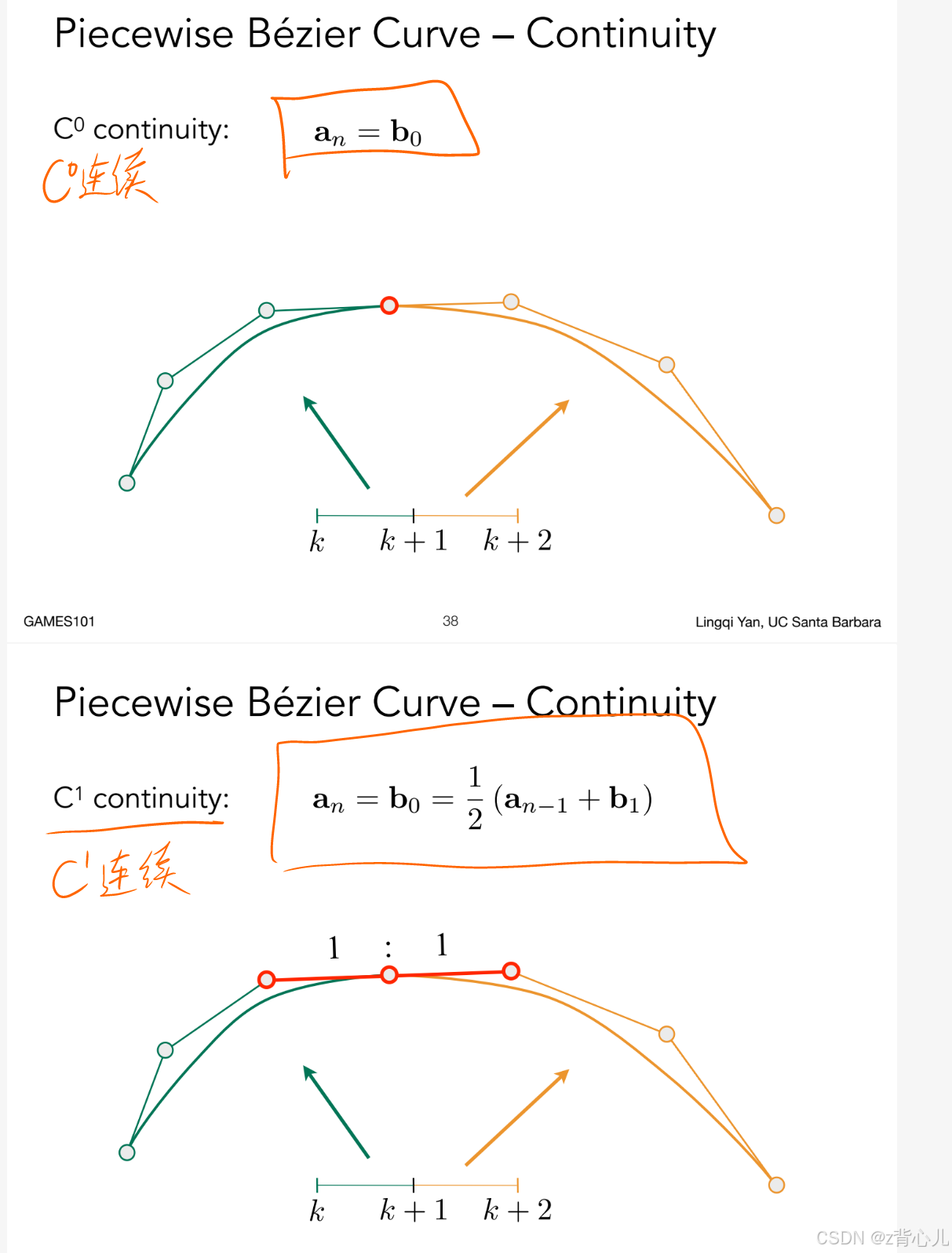
2.1.4 逐段贝塞尔曲线(Piecewise Bezier Curves)
顾名思义,以多段贝塞尔曲线,组合成一段长曲线,每一段贝塞尔曲线通常用4个控制点,在各段贝塞尔曲线的连接点处存在连续性要求,比如
C
0
C^0
C0连续和
C
1
C^1
C1连续,定义分别如下所示
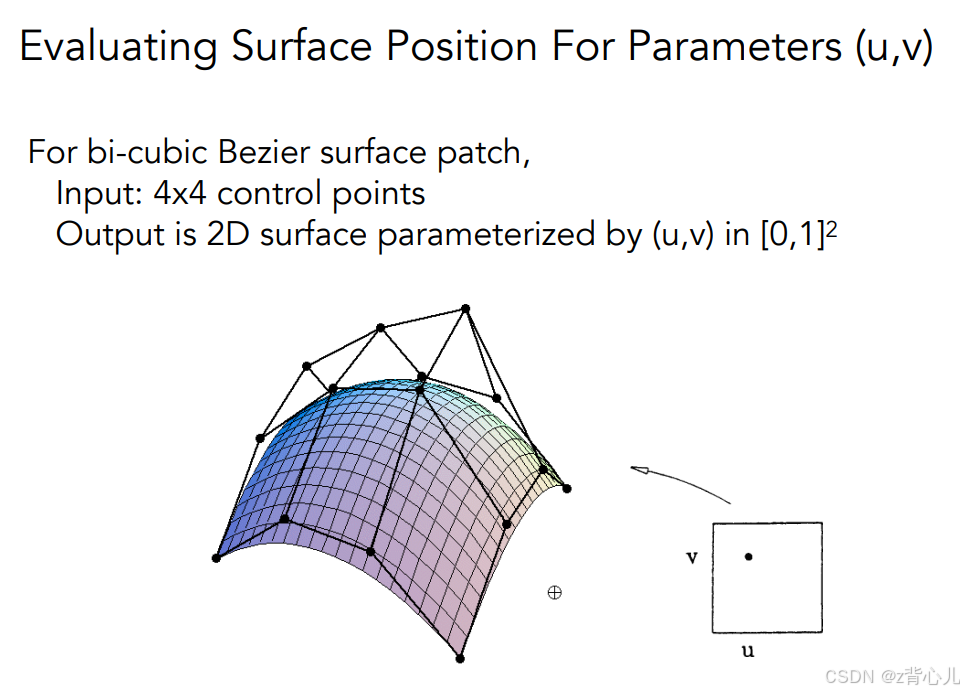
2.2 贝塞尔曲面
有了贝塞尔曲线,就能很容易的构造贝塞尔曲面,构造方法如下(以4*4个点为例):
1、首先,四个控制点为一组可构造四条贝塞尔曲线(u∈[0,1]);
2、再由这四条贝塞尔曲线上的点构造贝塞尔曲线即可得到贝塞尔曲面(v∈[0,1])。
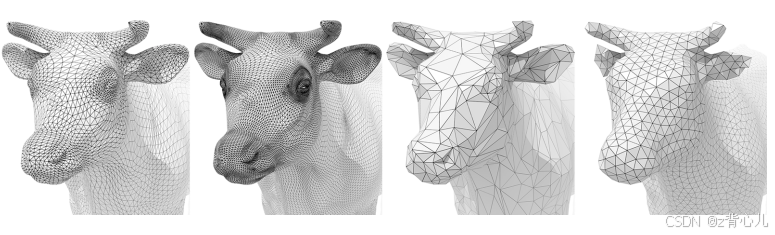
3、几何处理——网格操作(Mesh Operations)
Mesh Operations可分为三类,分别是网格细分(Mesh subdivision)、网格简化(Mesh simplification)、网格正则化(Mesh regularization)。效果如下所示
3.1 Mesh subdivision
网格细分就是增加三角形的数量,以此增加分辨率。介绍两种细分方法,分别是Loop subdivision(对三角形)和 Catmull-Clark subdivision(多边形都可)。
3.1.1 Loop subdivision
Loop subdivision可分为如下两步,
1、增加三角形的数量(将一个三角形变为四个——在三角形的每条边上取中点,再将三个中点连接起来)
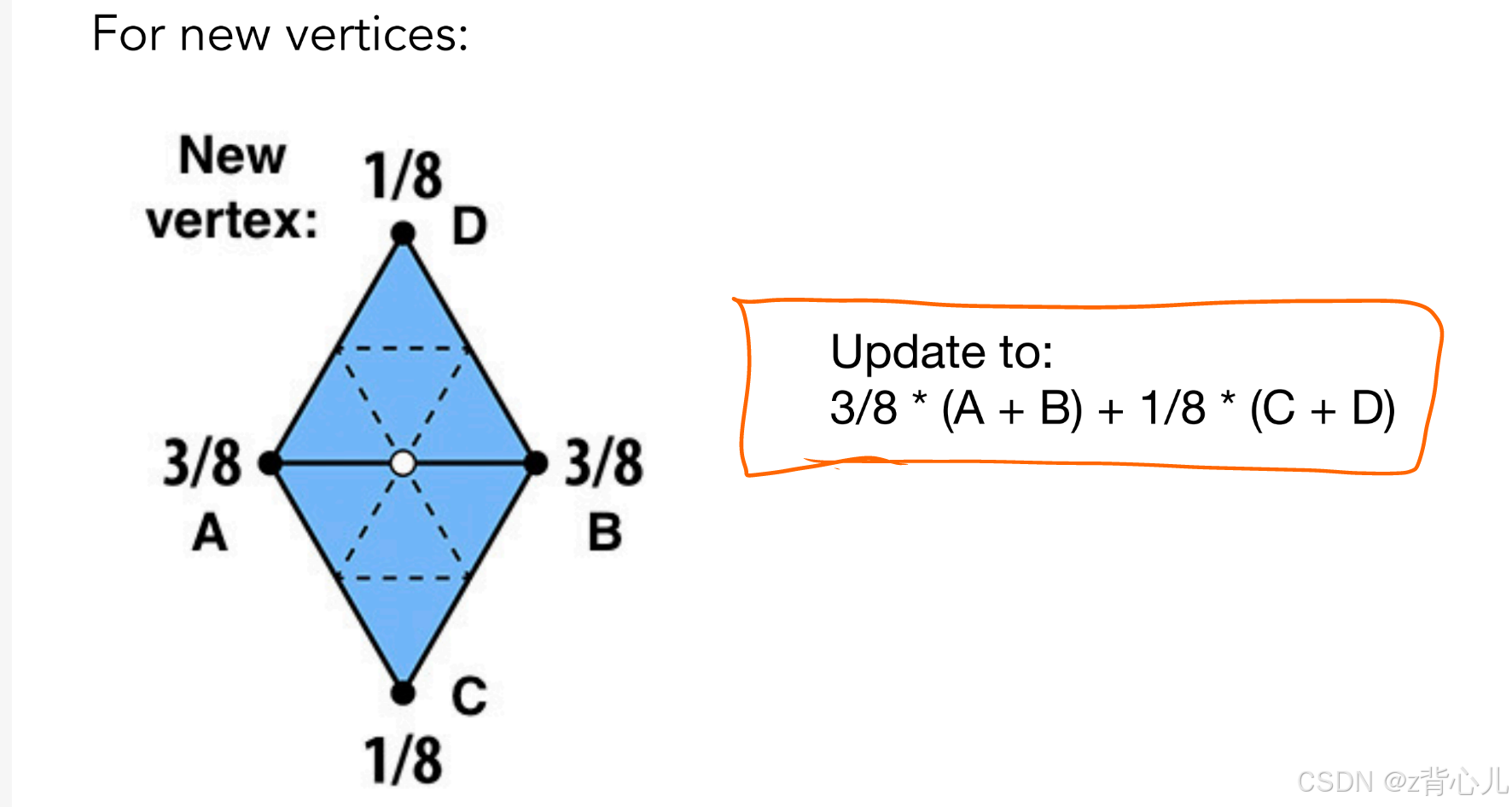
2、调整点的位置。
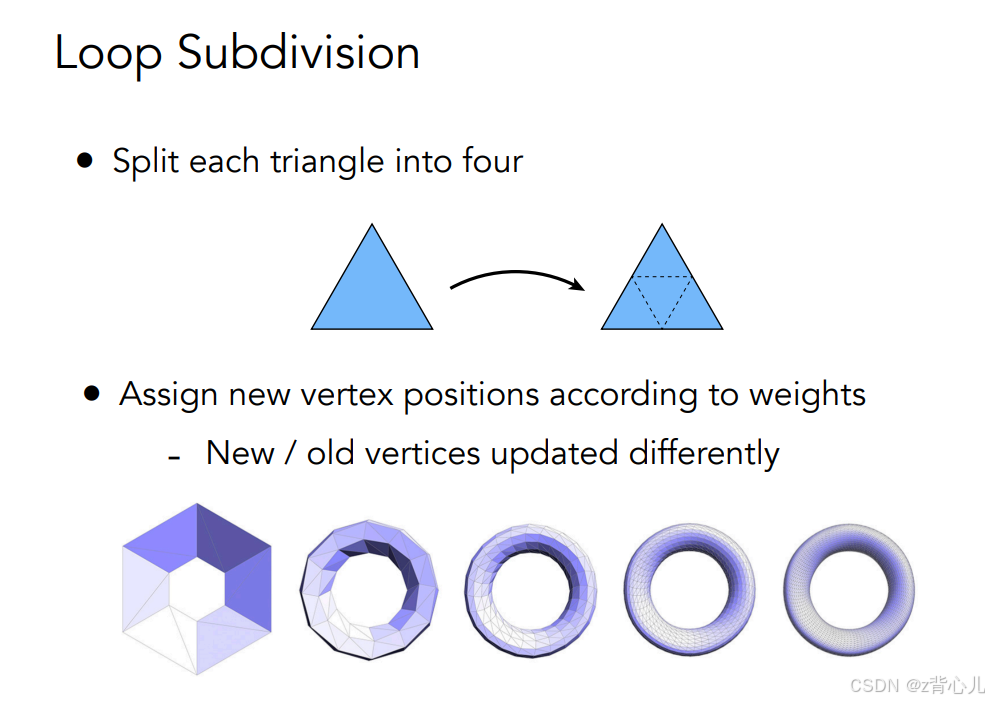
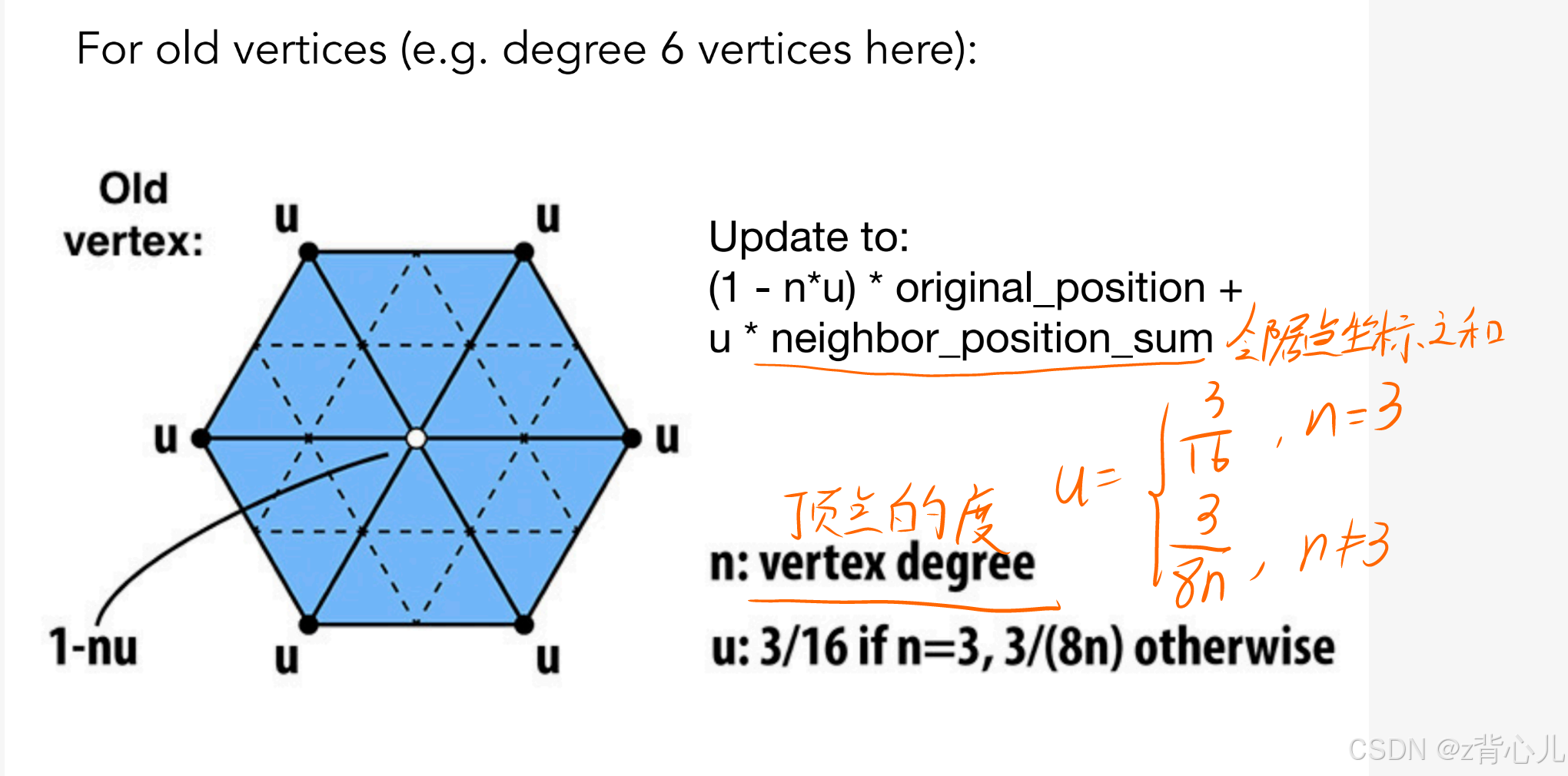
如何调整点的位置呢,首先将点分为两类,分别是新增的点(即中点)和旧点,再对这两类点分别采用如下方法进行调整
3.1.2 Catmull-Clark subdivision
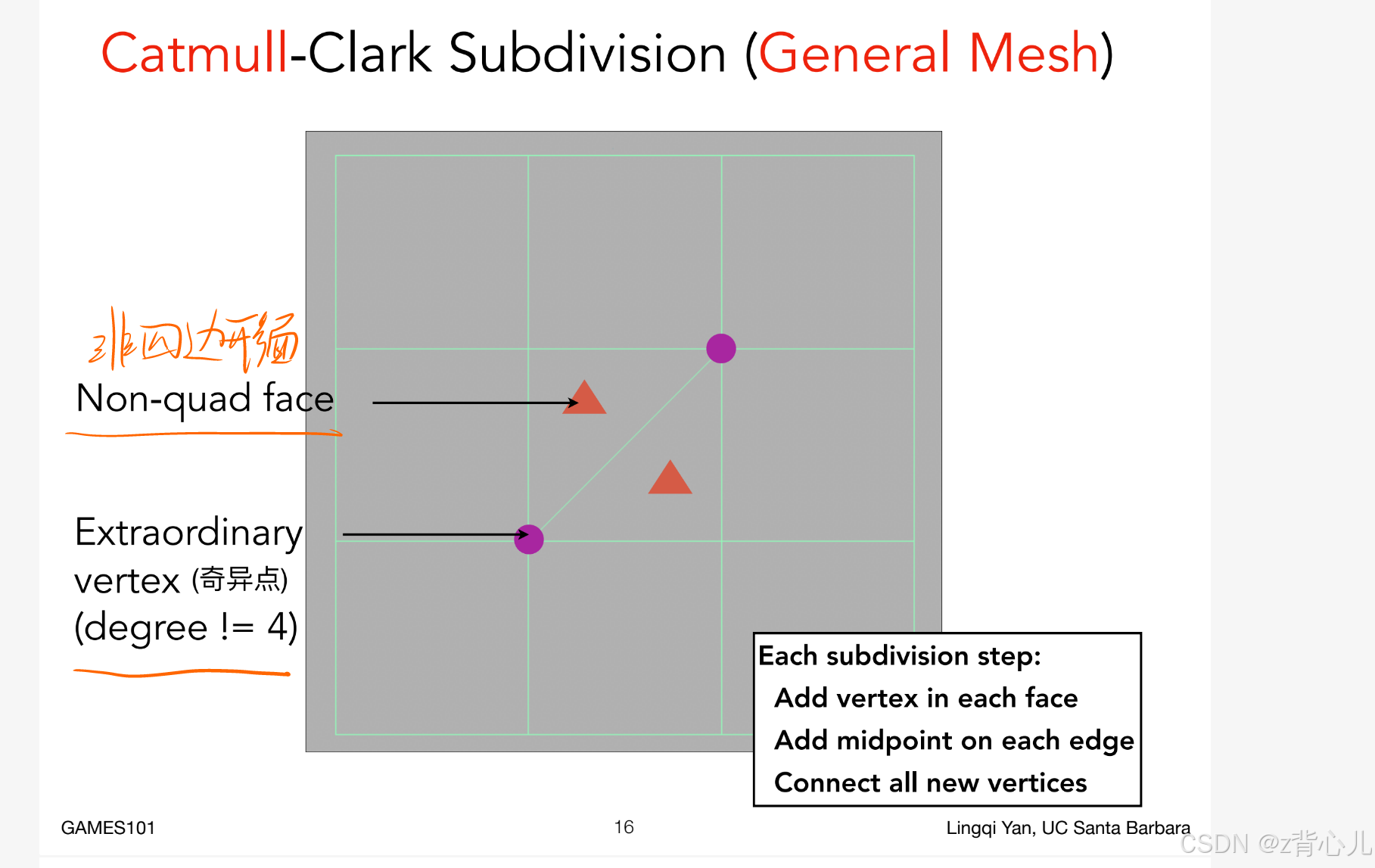
首先,对于如下的多边形网格,其中的网格可分为两类,由四条边组成的四边形面和不是由四边形组成的非四边形面(Non-quad face),点也可分为两类,度为4的点和度不为4的点(奇异点——Extraordinary vertex),细分步骤如下:
1、在每个面的中心增加一个点;
2、在每条边的中点增加一个点;
3、连接所有的新增点。
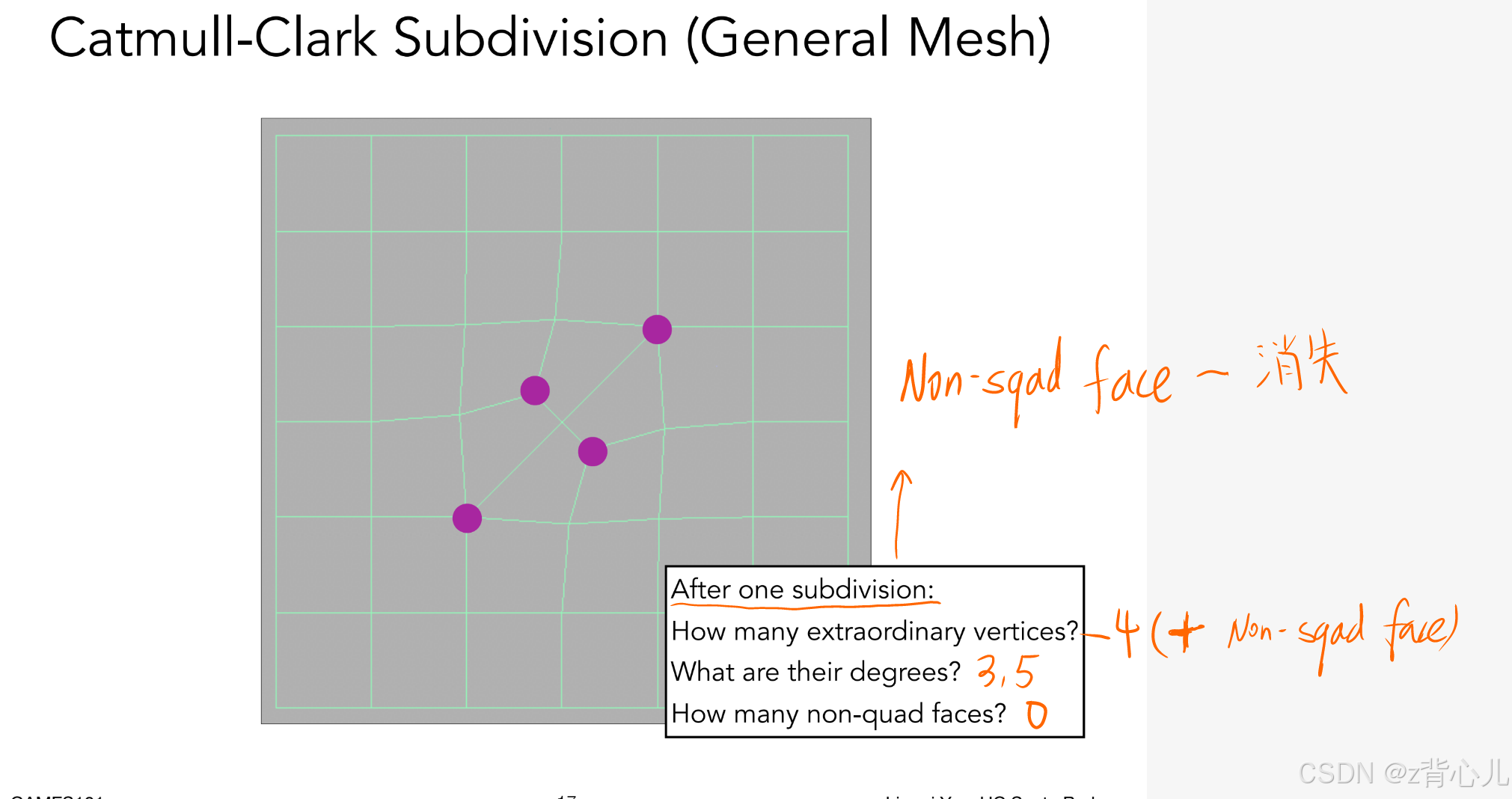
可见,经过第一次细分过后,非四边形面都消失了,变成了四边形面,奇异点的数目增加了,增加的数目为消失非四边形面的数目,此后无论再经过几次细分,奇异点数目都将不再变化。
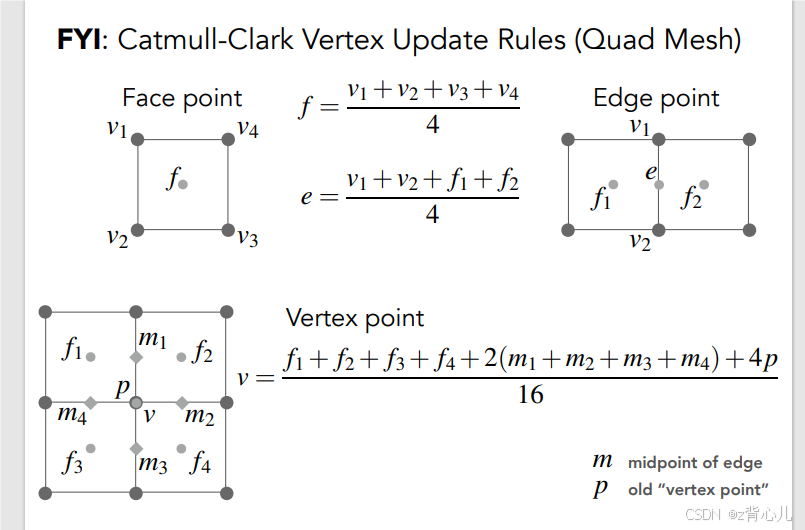
细分后点的位置更新规则如下所示
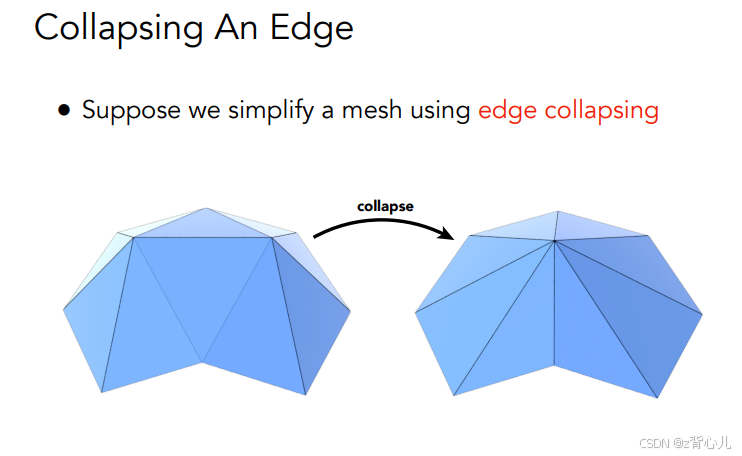
3.2 Mesh simplification
网格简化即减少三角形的数目,以此减小分辨率。采用的方法是坍缩边(即删掉一条边,再将与此边关联的各条边相连),如下所示
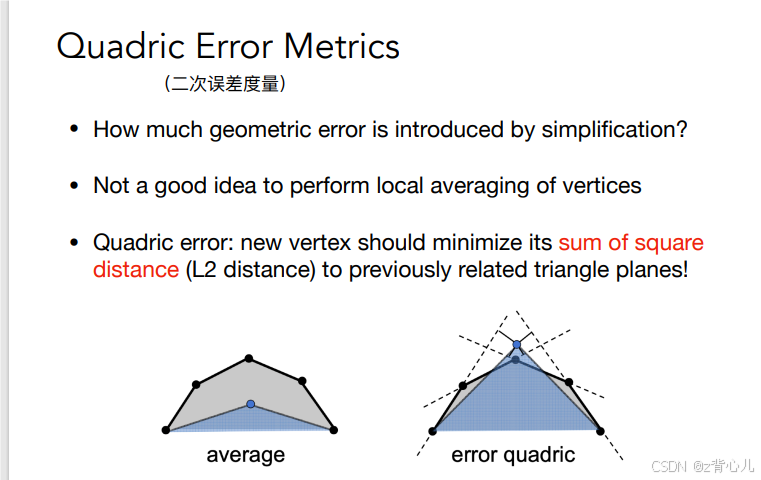
问题是在简化过程中,应该删掉拿一条边,首先定义二次度量误差如下,那么很简单,对于每一条边,求出他的二次度量误差,再删除二次度量误差最小的拿一条边即可,此后更新与此边关联的边的二次度量误差,再删除二次度量误差最小的那天边,再更新…,循环往复直到简化到满足要求。
4、补充:Shadow Mapping
4.1 Shadow Mapping方法
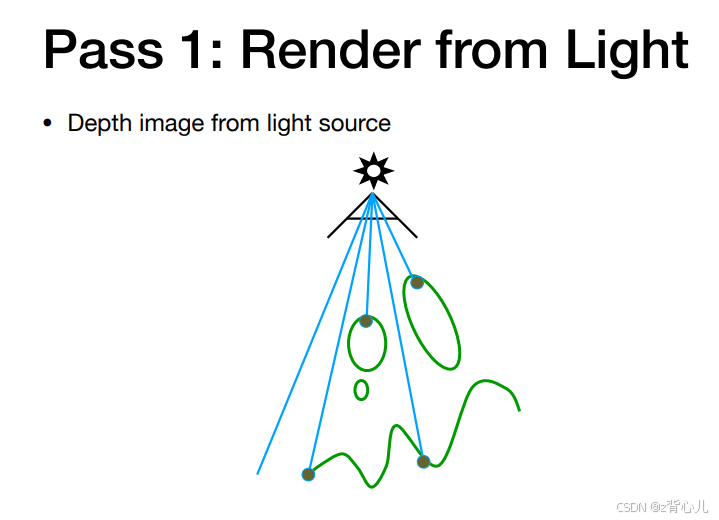
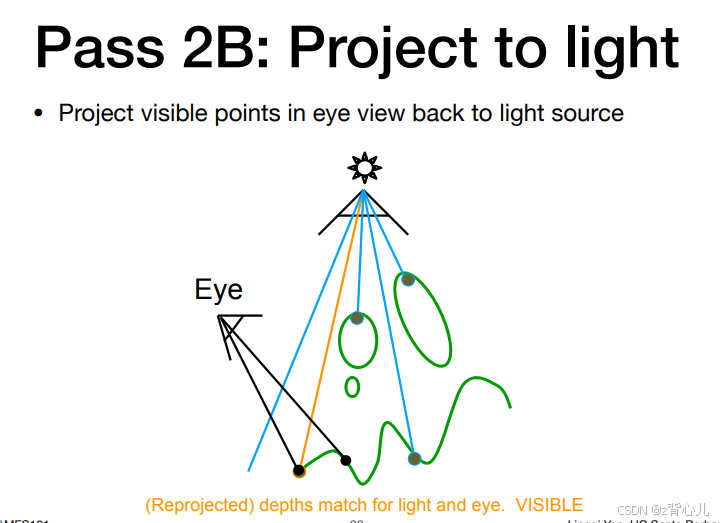
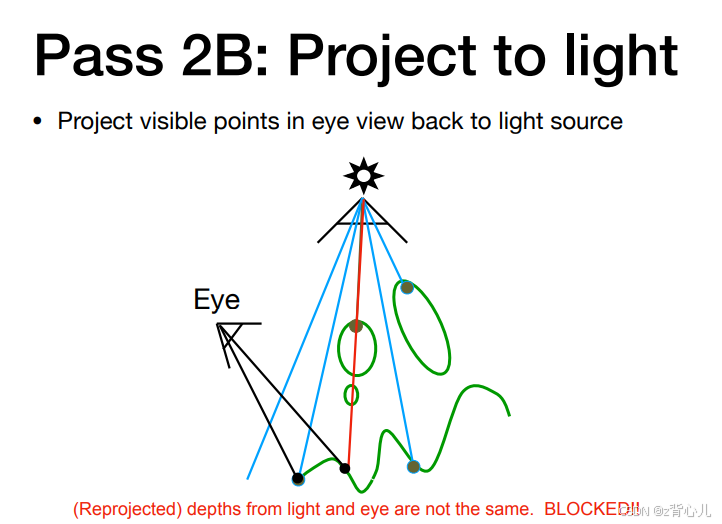
在此前光栅化和渲染中,我们已经能够渲染处物体的纹理,表面的光照,但还没有对阴影进行渲染,因此,shadow mapping就是渲染阴影的方法,他的核心思想是:首先定义非阴影区域,若一个点不是阴影,那么这个点一定能被光源看到、同时能被人眼(摄像头)看到。
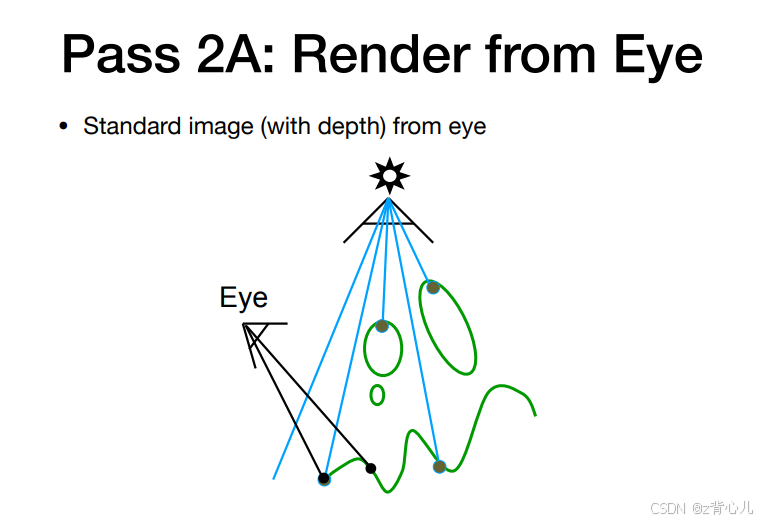
因此,shadow mapping分为两步,第一步是得到在光源处场景的深度图,第二步是得到在人眼(摄像头)处场景的深度图,再将此深度图投影到光源坐标系下,比较两图相同点处的深度,若深度相同,说明这个点为非阴影点,若不同,说明此点是阴影。
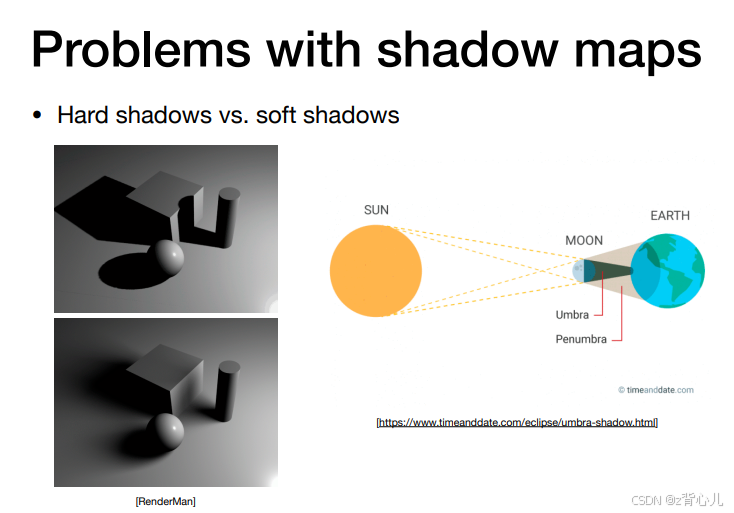
4.2 Shadow Mapping的问题
使用Shadow Mapping得到的阴影
1、是硬阴影,属于非黑即白式的,缺少过渡;
2、阴影的质量取决于shadow map的分辨率;
3、涉及浮点深度值的相等比较,意味着尺度、偏差和容差的问题。
硬阴影和软阴影的比较如下所示

















 16万+
16万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









