






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
四旋翼飞行器的PID优化控制研究是一个很有挑战性的领域,它涉及到对飞行器的姿态、位置和高度等参数进行精准调节,以实现稳定的飞行和准确的控制。常见的方法包括使用仿真软件进行模拟测试,以及实际飞行中的实验验证。PID控制器的参数调节通常需要结合经验和理论知识,以达到最佳的性能。
PID(比例-积分-微分)控制器是四旋翼飞行器常用的一种控制算法,用于稳定和控制其飞行姿态。然而,由于四旋翼飞行器具有非线性、耦合和高度不确定性的特点,如何优化PID控制器以获得更好的控制性能一直是一个研究热点。
四旋翼飞行器PID优化控制研究
一、四旋翼飞行器的基本结构与工作原理
四旋翼飞行器是一种通过四个对称分布的旋翼提供动力的无人机,其核心结构包括机体框架、电机、螺旋桨、飞控板、电池及传感器(如陀螺仪、加速度计、GPS等)。四个旋翼分为两组:1号与3号顺时针旋转,2号与4号逆时针旋转,通过反向旋转抵消旋翼产生的扭矩,无需尾桨即可实现稳定飞行。
飞行原理:
- 垂直运动:当四个旋翼转速同步增加时,总升力超过重力,飞行器垂直上升;反之则下降。
- 俯仰与滚转运动:通过调整前后或左右旋翼的转速差,产生绕横轴或纵轴的力矩,实现前后或左右倾斜运动。
- 偏航运动:通过增加对角线旋翼组的转速差,利用反扭矩不平衡使机身绕垂直轴旋转。
其动力学特性为欠驱动系统(6自由度由4个输入控制),需通过复杂的控制算法实现稳定飞行。
二、PID控制在四旋翼飞行器中的应用场景
PID控制因结构简单、鲁棒性强,被广泛应用于四旋翼的姿态和位置控制,具体实现如下:
- 姿态控制(内环控制):
- 输入为期望姿态角(俯仰角、滚转角、偏航角),通过陀螺仪和加速度计反馈实际角度,计算误差并输出PID控制量至电机。
其中Kp,Ki,KdKp,Ki,Kd为比例、积分、微分系数。
2. 位置控制(外环控制):
- 根据期望位置(xd,yd,zdxd,yd,zd)与GPS/视觉反馈的实际位置差值,通过PID生成姿态角指令,传递给内环控制器。
- 抗干扰能力:
- 积分项(I)消除稳态误差(如风力扰动下的位置偏移),微分项(D)抑制快速扰动(如突风冲击)。
三、四旋翼PID参数优化方法
传统PID参数依赖经验调参,而现代优化算法可自动搜索最优参数组合,显著提升控制性能:
- 粒子群优化(PSO):
- 模拟鸟群觅食行为,通过粒子位置(即PID参数)的迭代更新,最小化目标函数(如积分时间绝对误差ITAE)。实验表明,PSO在偏航角控制中优化效果比传统方法提升4%-15%。
- 改进策略:引入混沌序列增强全局搜索能力,结合自适应惯性权重平衡局部与全局优化。
- 遗传算法(GA):
- 通过选择、交叉、变异操作筛选最优参数。在俯仰角控制中,GA优化后调整时间缩短13%-21%。
- 人工蜂群算法(ABC):
- 在高度控制中表现最佳,ITAE误差降低1.2%-4.4%。
- 强化学习(RL):
- 结合试错机制与奖励函数,动态调整PID参数以适应环境变化。例如,在轨迹跟踪中,RL-PID的跟踪误差比固定参数降低约30%。
优化流程示例:
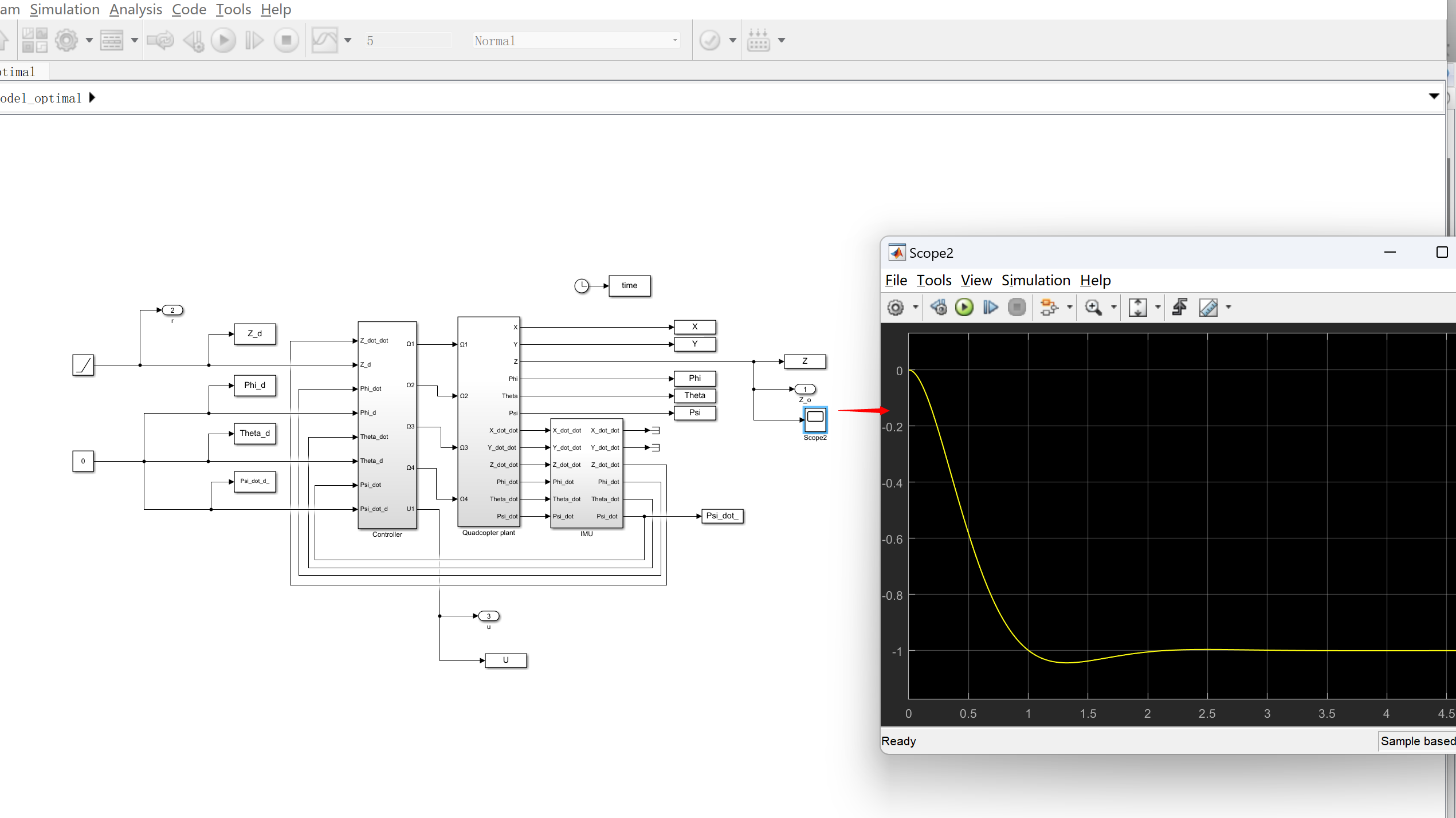
- 建立四旋翼动力学模型(如Simulink模型);
- 定义适应度函数(如ITAE、超调量);
- 运行优化算法搜索最优Kp,Ki,KdKp,Ki,Kd;
- 仿真验证并迭代优化。
四、现有研究文献与案例分析
- 经典PID控制研究:
- 李俊等(2019)通过Matlab/Simulink验证PID在自稳定控制中的有效性,实验显示其可校正气流扰动导致的姿态偏移。
- 智能优化算法应用:
- 张智轩等(2022)提出改进混沌PSO算法,姿态角调整时间缩短15%,超调量减少6%。
- Gün等(2022)结合PSO优化PID参数,四旋翼在强风环境下仍能保持预定轨迹,能耗降低12%。
- 混合控制策略:
- 冯立杰等(2024)设计双闭环模糊PID控制器,内环控制姿态、外环控制位置,仿真显示响应速度提升20%。
- 麦鴚等(2024)提出基于改进黑猩猩算法(IChOA)的PID整定方法,姿态角跟踪误差较传统PID减少35%。
五、结论与展望
PID控制是四旋翼飞行器实现稳定飞行的核心技术,而参数优化算法可显著提升其动态性能与鲁棒性。未来研究可聚焦以下方向:
- 多算法融合:如GA-PSO混合优化,兼顾全局搜索与收敛速度;
- 自适应控制:结合在线学习(如强化学习)实时调整参数;
- 硬件在环(HIL)验证:将优化算法部署至实际飞控系统,测试复杂环境下的可靠性。
通过持续优化控制策略,四旋翼飞行器将在物流、救援、农业等领域发挥更大应用潜力。
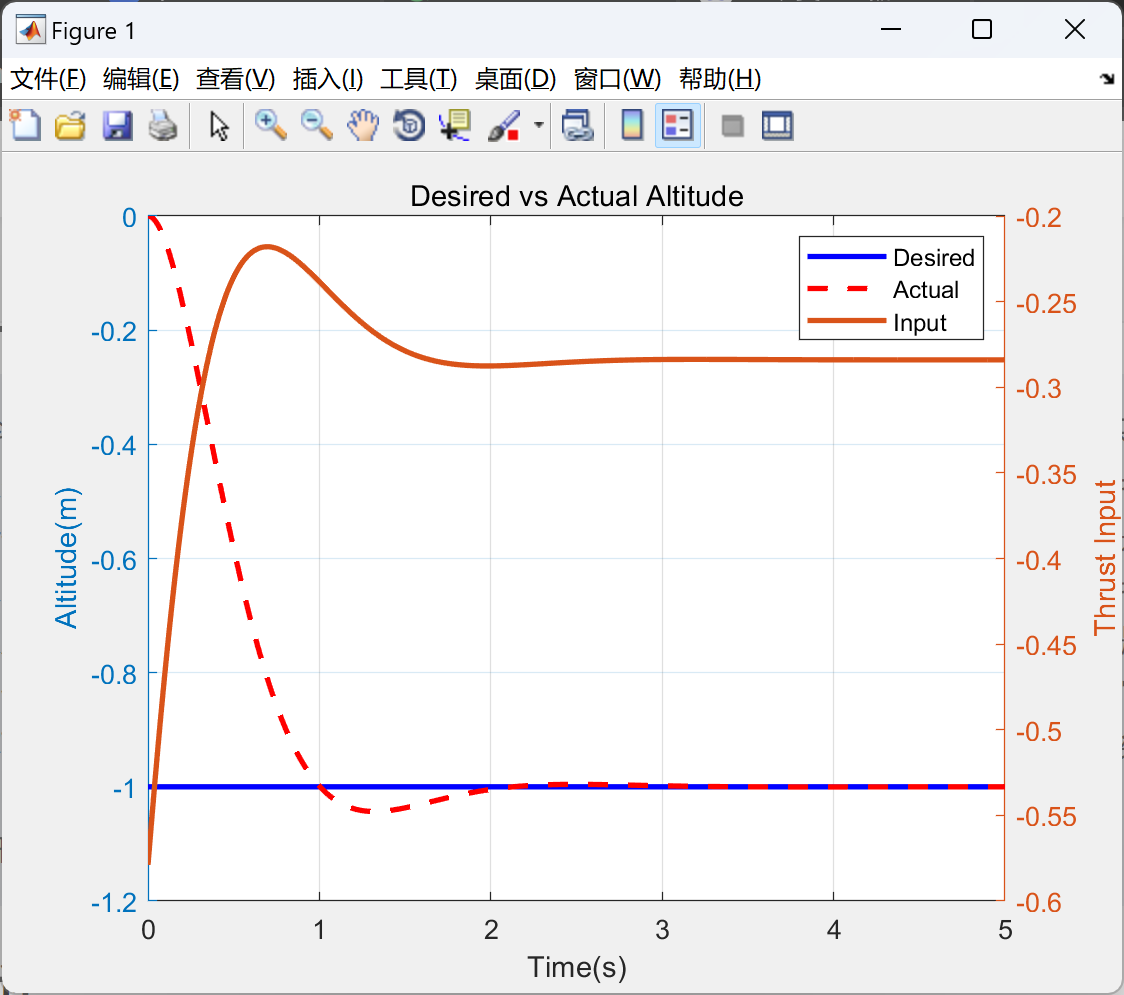
📚2 运行结果
部分代码:
% Quadrotor constants
Ixx = 7.5*10^(-3); % Quadrotor moment of inertia around X axis
Iyy = 7.5*10^(-3); % Quadrotor moment of inertia around Y axis
Izz = 1.3*10^(-2); % Quadrotor moment of inertia around Z axis
Ax=0.0;
Ay=0.0;
Az=0.0;
Jr = 6.5*10^(-7); % Total rotational moment of inertia around the propeller axis 6.5*10^(-6)
b = 1.144e-08; % Thrust factor
d = 9.94e-10; % Drag factor 1.0876e-9
l = 0.23; % Distance to the center of the Quadrotor
g = 9.81; % Gravitational acceleration
weight =.284; %kg Weight=mg (from a scale)
m = weight/g; % Mass of the Quadrotor in Kg
b_m=2.415e-6;
R=0.117; %Motor Resistance
L=0.001*R; %Electric Inductance
Kemf=0.00255; %Back electromotive force constant
Kt=Kemf;
Gyro_bias=0;
Accel_bias=0;
Phi_dot_bias=0;
Theta_dot_bias=0;
Psi_dot_bias=0;
X_dot_dot_bias=0;
Y_dot_dot_bias=0;
Z_dot_dot_bias=0;
Grav_bias=g;
%set_param('Controlled_simulink_model_optimal','AlgebraicLoopSolver','LineSearch')
global Kp Ki Kd
format short e
Kp=1;
Ki=1;
Kd=1;
x0=[Kp; Ki;Kd];
x=fminsearch('OptPID',x0)
Kp=x(1)
Ki=x(2)
Kd=x(3)
sim('Controlled_simulink_model_optimal')
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]曹美会,鲜斌,张旭,等.基于视觉的四旋翼无人机自主定位与控制系统[J].信息与控制, 2015, 000(002):190-196,202.
[2]薛佳乐,程珩.基于串级PID四旋翼飞行器控制系统研究[J].电子技术应用, 2017, 43(5):5.DOI:10.16157/j.issn.0258-7998.2017.05.033.
[3]张萍,雷宁.基于模糊PID四旋翼飞行器姿态控制[J].航空计算技术, 2019, v.49;No.210(03):119-122.DOI:CNKI:SUN:HKJJ.0.2019-03-029.
🌈4 Matlab代码、Simulink仿真实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 9550
9550

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









