







前段时间的大作业,负责的寻迹部分,现在把这部分的代码贴上来,具体建模的过程b站上有很多教学视频,就不赘述了。
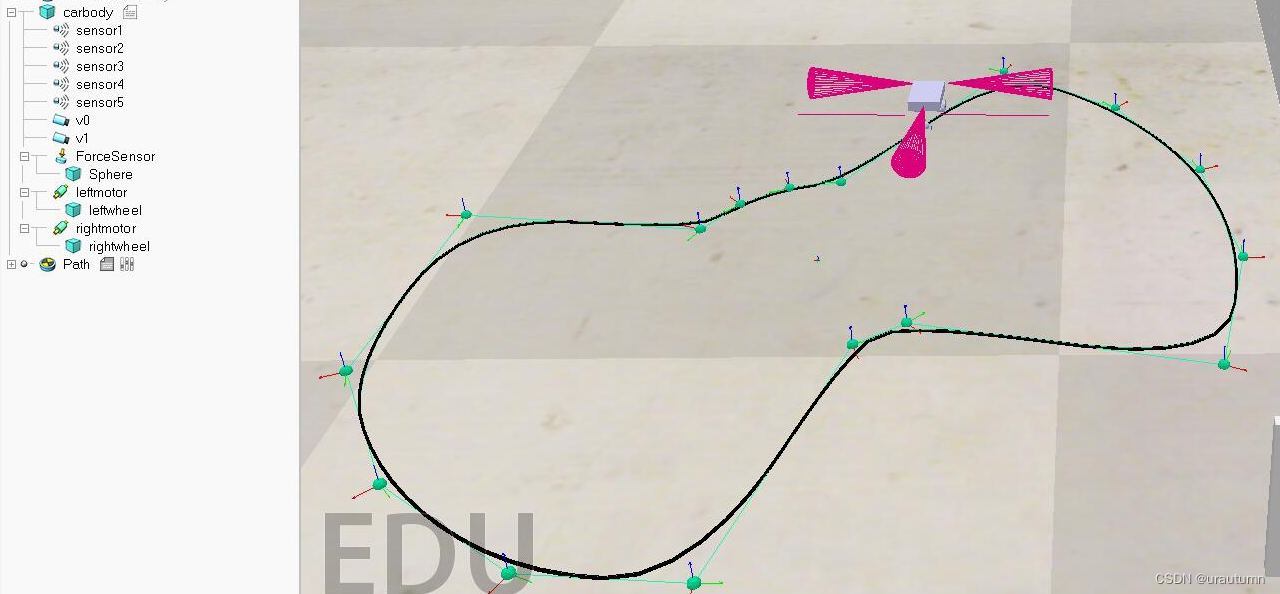
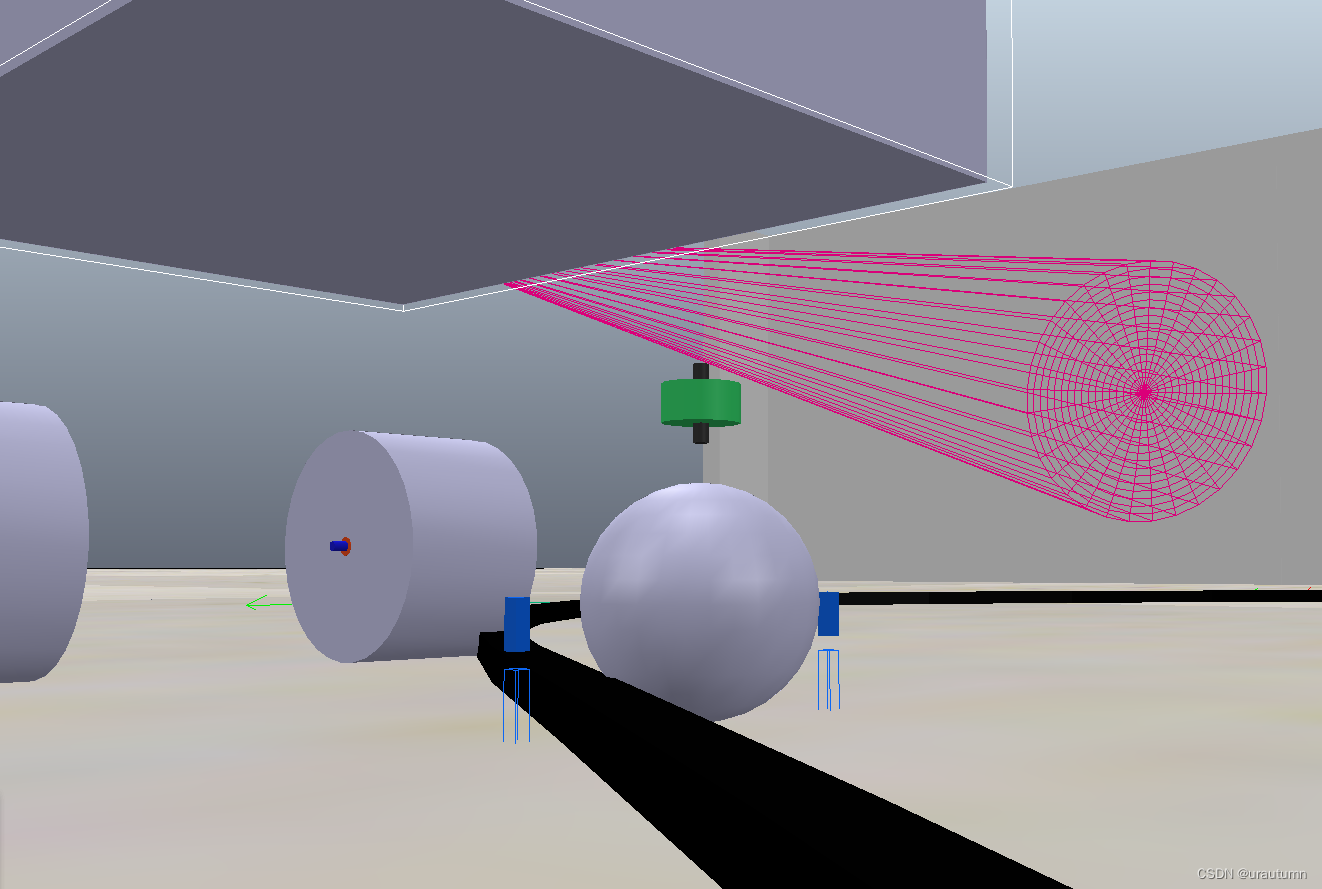
注意要使黑色轨迹略高于地面,同时视觉传感器的蓝色线框部分高于黑色轨迹。
function sysCall_init()
LeftMotor=sim.getObjectHandle('leftmotor')--马达
RightMotor=sim.getObjectHandle('rightmotor')
floorSenorHandles={-1,-1}
floorSenorHandles[1]=sim.getObjectHandle('v0')--视觉传感器
floorSenorHandles[2]=sim.getObjectHandle('v1')
speed=1
back=-1
end
function sysCall_actuation()
senorReading={false,false}
for i=1,2,1 do
result,data=sim.readVisionSensor(floorSenorHandles[i])
if (result>=0) then
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 722
722











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









