









滤波方法不能处理大场景,在线slam
图优化方法可以处理大场景,完全slam
1.Graph—based SLAM
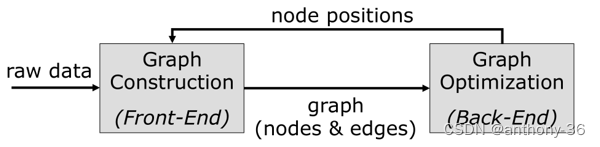
- 用一个图(Graph)来表示SLAM问题
- 图中的节点来表示机器人的位姿
- 两个节点之间的边表示两个位姿的空间约束
- Graph—based SLAM:构建图,并且找到一个最优的配置,让预测与观测的误差最小(非线性最小二乘)
2.非线性最小二乘(Non-Linear Least Square)
1.要解决的问题
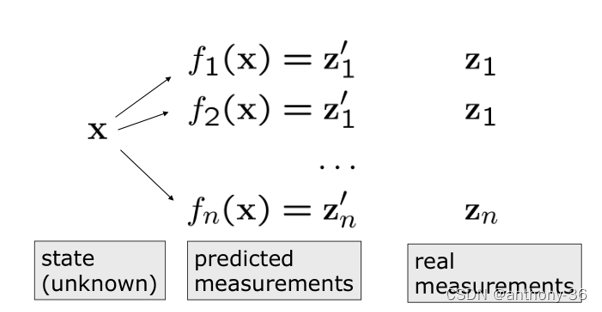
- 给定一个系统,其状态方程有f(x)=z描述,其中:
x为该系统的状态向量——即需要估计的值
f(x)是一个非线性的映射函数
状态向量x,可以通过非线性函数f(x)映射得到z
z表示系统的观测值,可以通过传感器进行直接观测
- 给定该系统的n个会有噪声的观测值 ( z 1 , . . . , z 2 ) (z_1,...,z_2) (z1,...,z2),估计状态向量x,使其经过f(x)映射之后的预测值和观测值得误差最小
- 跟非线性最小二乘基本相同,不同之处在于f(x)是一个非线性函数
2.过程
- x为机器人的位置
- f(x)为传感器的观测模型(似然场模型或者重投影模型)
- z为传感器的观测值,激光数据或者图像特征点
- 找到最优的x,让预测和观测的误差最小
3.误差函数
- 目标为最小化预测和观测的差,因此误差即为预测和观测的差
e i ( x ) = f i ( x ) − z i e_i(x)=f_i(x)-z_i ei(x)=fi(x)−zi
- 假设误差服从高斯分布,因此其对应的信息矩阵为${\sum}_i $,因此该观测值误差的平方定义为:
E i ( x ) = e i ( x ) T ∑ i e i ( x ) E_i(x)=e_i(x)^T{\sum}_ie_i(x) Ei(x)=ei(x)T∑iei(x)
- 因此,非线性最小二乘的目标函数为:
F ( x ) = ∑ E i ( x ) = ∑ e i ( x ) T ∑ i e i ( x ) m i n x F ( x ) F(x)=\sum E_i(x)=\sum {e_i(x)^T{\sum}_ie_i(x)}\\ \\ \underset{x}{min}F(x) F(x)=∑Ei(x)=∑ei(x)T∑iei(x)xminF(x)
4.解决问题
- 目标函数:
m i n x F ( x ) \underset{x}{min}F(x) xminF(x)
- 直接想法:求F(X)关于变量x的导数,另其等于0,求解方程即可
- 对于线性问题,该方法可以正确,但是对于非线性问题不正确
- F(x)为关于x的非线性方程,能否把其化为关于x的线性方程——泰勒展开
5.线性化
- F(x)是关于x的非线性函数的原因是:误差函数 e i ( x ) e_i(x) ei(x)是一个非线性函数。因此直接对误差函数 e i ( x ) e_i(x) ei(x)进行线性化即可。
e i ( x + △ x ) = e i ( x ) + J i ( x ) △ x e_i(x+△x)=e_i(x)+J_i(x)△x ei(x+△x)=ei(x)+Ji(x)△x
- 其中J为映射函数对状态向量x的导数,称之为Jacobian矩阵(雅克比矩阵)
J i ( x ) = ( ∂ f i ( x ) △ x x 1 , ∂ f i ( x ) ∂ x 2 , . . . . , ∂ f i ( x ) ∂ x n ) J_i(x)=(\frac{\partial f_i(x)}{△x x_1},\frac{\partial f_i(x)}{\partial x_2},....,\frac{\partial f_i(x)}{\partial x_n}) Ji(x)=(△xx1∂fi(x),∂x2∂fi(x),....,∂xn∂fi(x))
- 因此函数F(x)的可化解为:
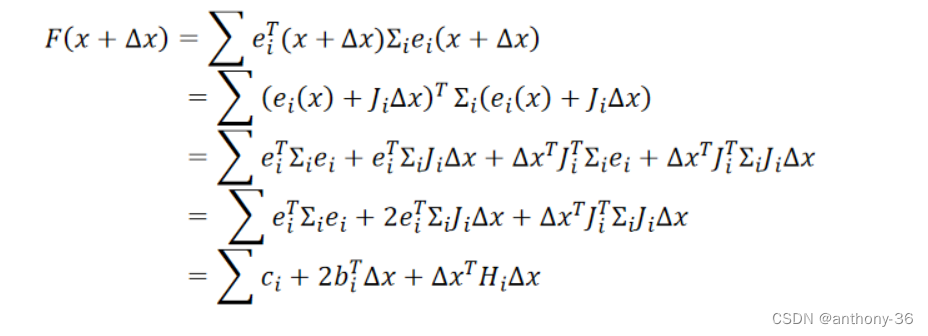
F ( x + △ x ) = e i ( x + △ x ) T ∑ i e i ( x + △ x ) F(x+△x)=e_i(x+△x)^T{\sum}_ie_i(x+△x) F(x+△x)=ei(x+△x)T∑iei(x+△x)
-
F(x)的化解:
-
F(x+△x)为关于变量△x的二次函数
-
F(x+△x)的极值可通过令其关于△x的导数等于0求解得到:
∂ F ( x + △ x ) ∂ △ x = 2 b + 2 H △ x = 0 H △ x = − b △ x ∗ = − H − 1 b \frac{\partial F(x+△x)}{\partial △x}=2b+2H△x=0\\ H△x=-b\\ △x^*=-H^{-1}b ∂△x∂F(x+△x)=2b+2H△x=0H△x=−b△x∗=−H−1b
6.流程
①线性化误差函数
e
i
(
x
+
△
x
)
=
e
i
(
x
)
+
J
i
(
x
)
△
x
e_i(x+△x)=e_i(x)+J_i(x)△x
ei(x+△x)=ei(x)+Ji(x)△x
②构建线性系统
b
T
=
∑
(
e
i
T
∑
i
J
i
)
H
=
∑
(
J
i
T
∑
i
J
i
)
b_T=\sum (e_i^T{\sum}_iJ_i) \\ H=\sum (J_i^T{\sum}_iJ_i)
bT=∑(eiT∑iJi)H=∑(JiT∑iJi)
③求解线性系统
△ x ∗ = − H − 1 b △x^*=-H^{-1}b △x∗=−H−1b
④更新解,并不断迭代直至收敛
x = x + △ x ∗ x=x+△x^* x=x+△x∗
















 1854
1854











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











