






 本文探讨了双目感知技术的优势,如解决透视问题和不依赖物体检测,以及其劣势如硬件精确配准和软件计算复杂度。核心内容涵盖了双目深度估计的基本原理、视差计算和PSMNET方法。讨论了深度估计误差来源及改善策略,涉及距离、光照条件和特征提取的影响。
本文探讨了双目感知技术的优势,如解决透视问题和不依赖物体检测,以及其劣势如硬件精确配准和软件计算复杂度。核心内容涵盖了双目深度估计的基本原理、视差计算和PSMNET方法。讨论了深度估计误差来源及改善策略,涉及距离、光照条件和特征提取的影响。
双目感知
优势:
- 单目3D感知依赖于先验知识和几何约束
- 深度学习的算法非常依赖于数据集的规模、质量以及多样性
- 双目系统解决了透视变换带来的歧义性
- 双目感知不依赖于物体检测的结果,对任意障碍物均有效
劣势:
- 硬件:摄像头需要精确配准,车辆运行过程中也要始终保持配准的正确性
- 软件:算法需要同时处理来自两个摄像头的数据,计算复杂度较高
双目深度估计
基本原理
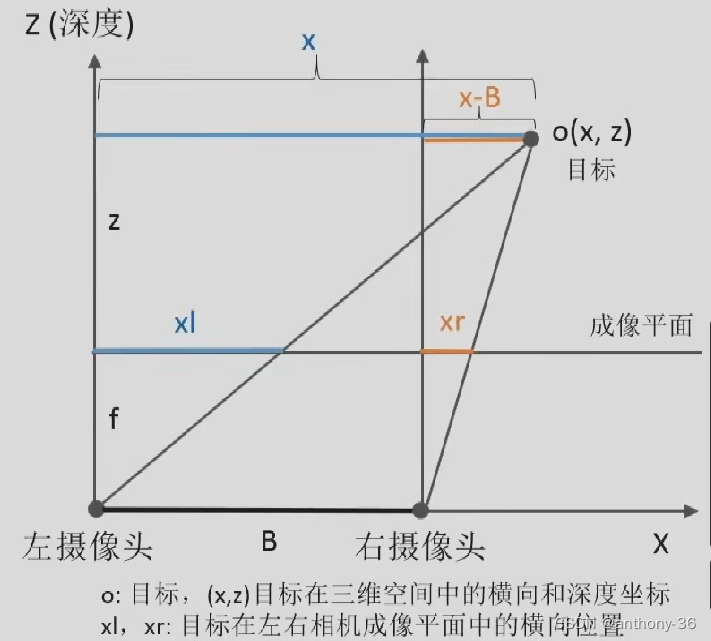
1.概念和公式
-
B:基线长度(两个相机之间的距离)
-
f:相机的焦距
-
d:视差(左右两张图像上同一个3D点之间的距离)
-
f和B是固定的,要求解深度z,只需估计视差d(xl-xr)
根据相似三角形,得到 { f / z = x l / x f / z = x r / x − B 只有 x 和 z 是未知变量 根据相似三角形,得到\begin{cases} f/z=xl/x\\ f/z=xr/x-B \end{cases} \\ 只有x和z是未知变量 根据相似三角形,得到{f/z=xl/xf/z=xr/x−B只有x和z是未知变量
得到下列式子:
Z = f B / d Z=fB/d Z=fB/d
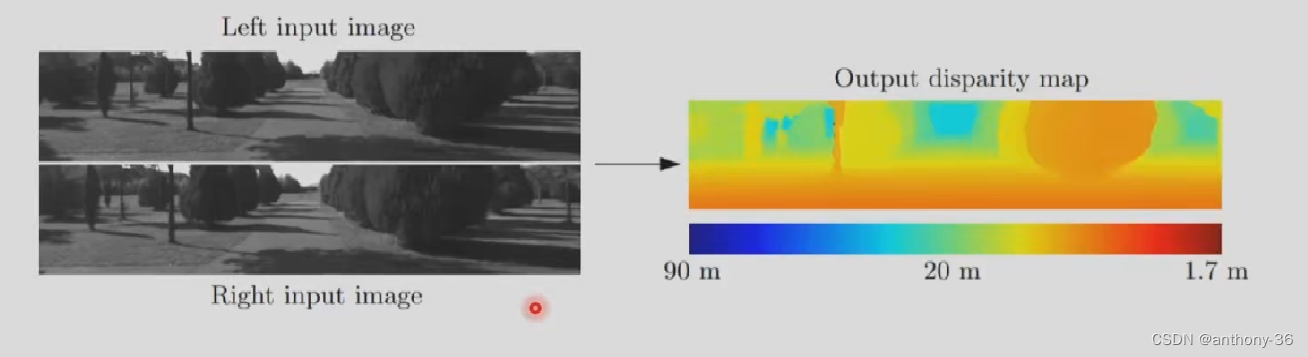
2.视差估计:对于左图中的每个像素点。需要找到右图中与其匹配的点。
- 对于每个可能的视差(范围有限),计算匹配误差,因此得到的三维误差数据称为Cost Volume。、
- 计算匹配误差时考虑像素点附近的局部区域,比如对局部区域内所有对应像素值的差进行求和。
- 通过Cost Volume可以得到每个像素处的视差(对应最小匹配误差的),从而得到深度值。
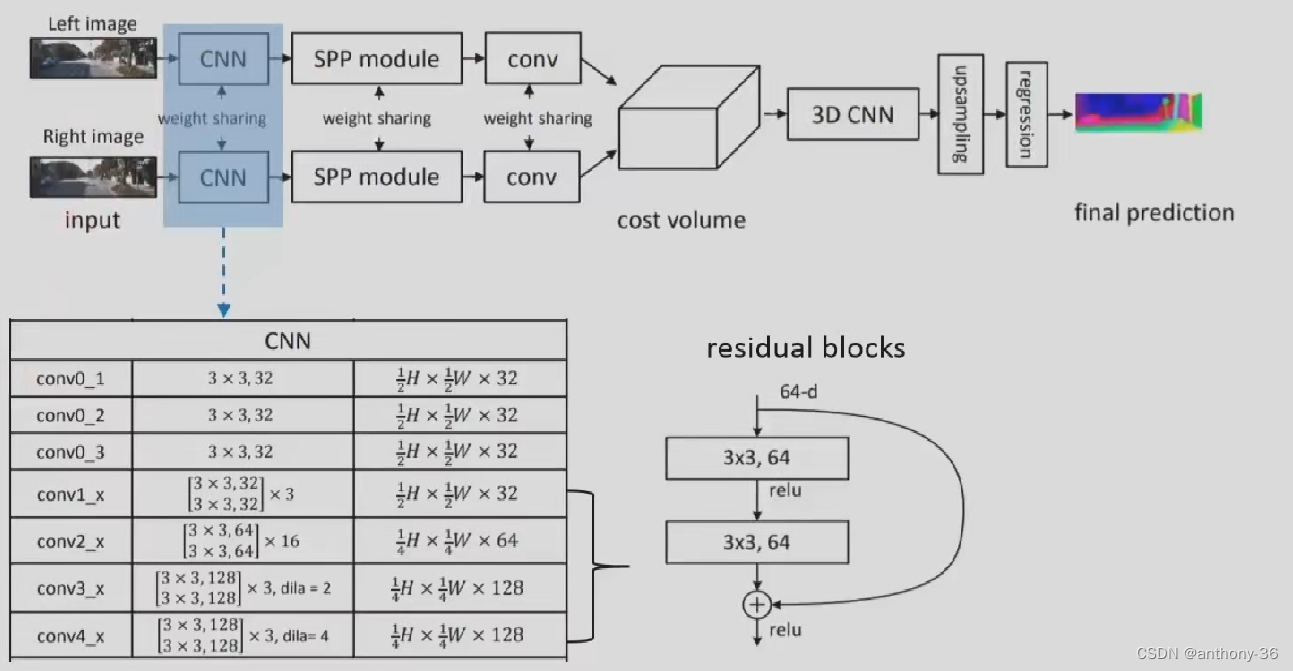
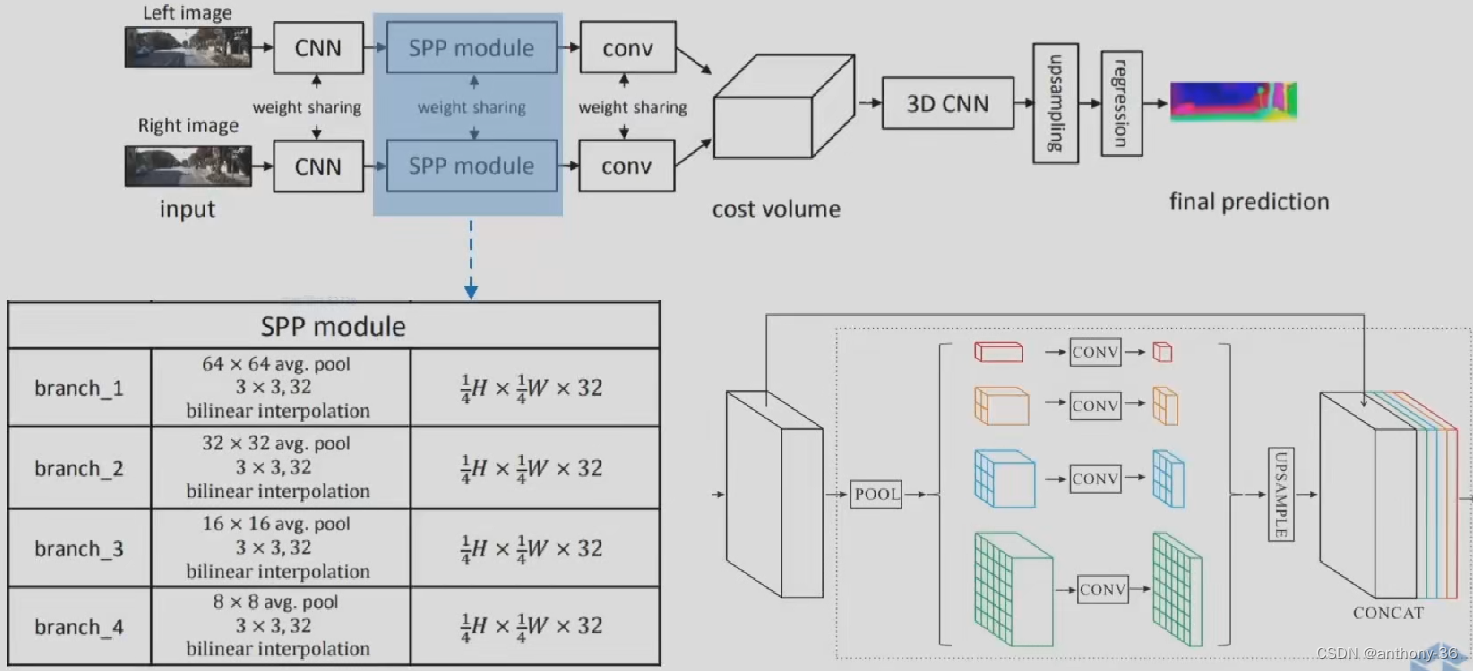
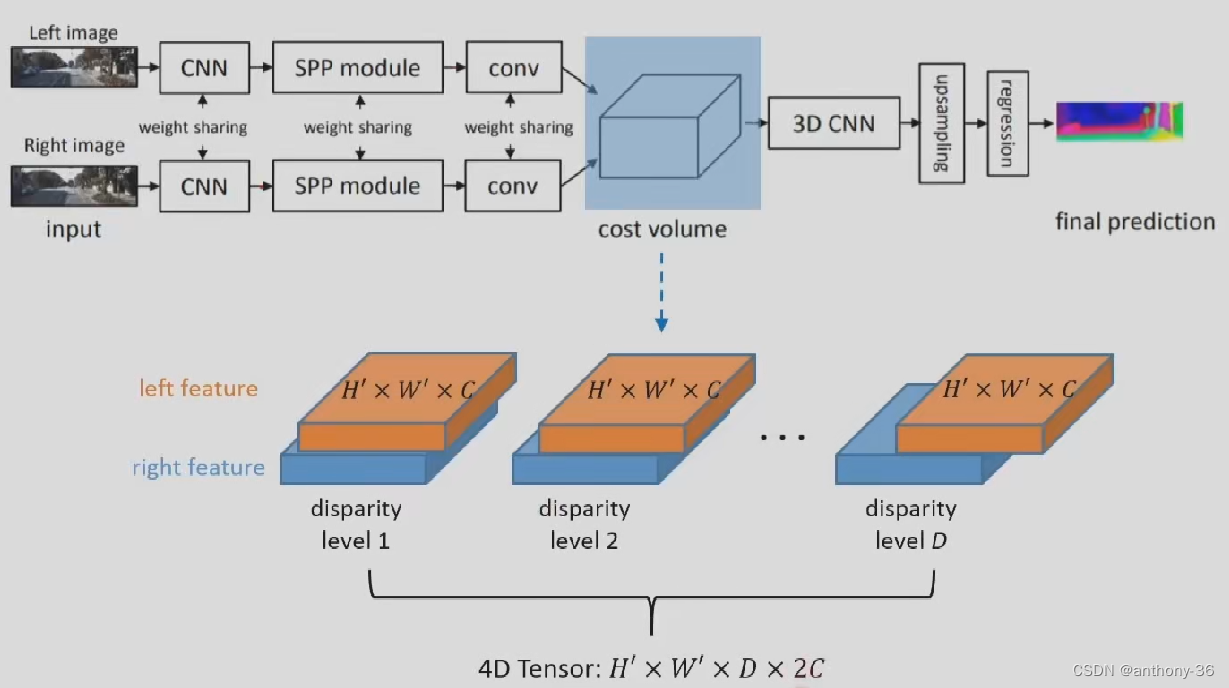
PSMNET
1.左右图像上采用共享的卷积网络进行特征提取
- 包括下采样,金字塔结构和空洞卷积来提取多分辨率的而信息并扩大感受野
2.左右特征图构建Cost Volume
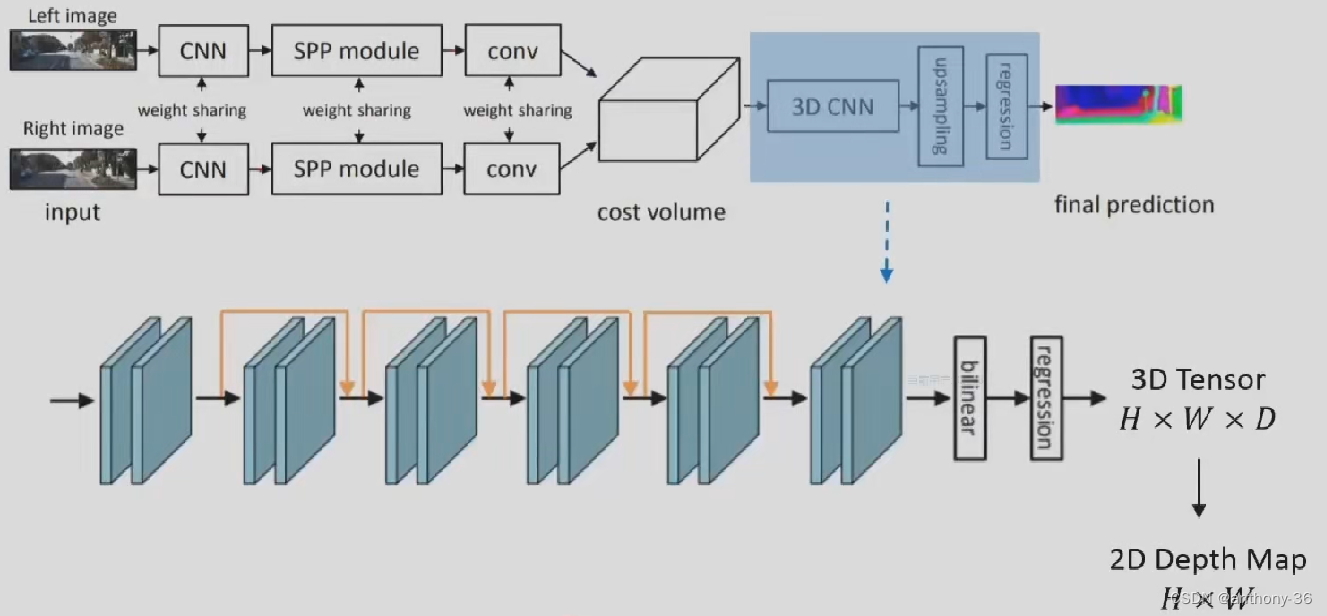
3.3D卷积提取左右特征图以及不同视差级别之间的信息
4.上采样到原始分辨率,找到匹配误差最小的视差值
5.过程
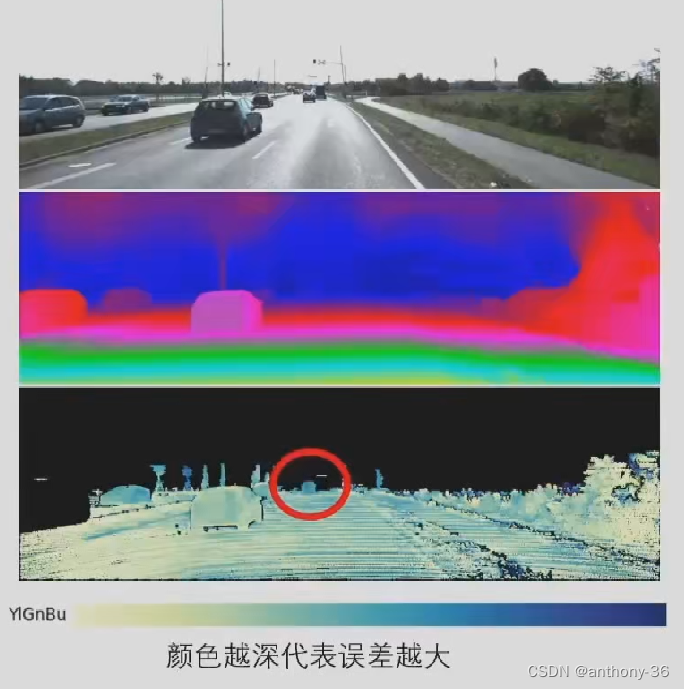
6.结果分析(KITTI数据集)
- 物体和背景上出现误差

原因分析:虽然特征包含了邻域信息,但是缺乏高层语义信息的监督信号,无法理解场景。
改进方法:用物体检测和语义分割的结果进行后处理,或者多个任务
- 距离过长出现的误差
| 距离 | 0-10m | 10-30m | 30-60m | 60-inf | 0-inf |
|---|---|---|---|---|---|
| 深度误差(RMSE) | 0.268 | 1.203 | 6.056 | 16.604 | 2.605 |
原因分析:远距离的视差值较小,在离散的图像像素上难以区分
Z
=
f
B
/
d
Z=fB/d
Z=fB/d
改进方法:①提高图像的空间分辨率(长焦),使得远距离物体也有较多的像素覆盖
②增加基线长度,从而增加视差的范围
- 低纹理或者低光照的区域,深度估计误差较大
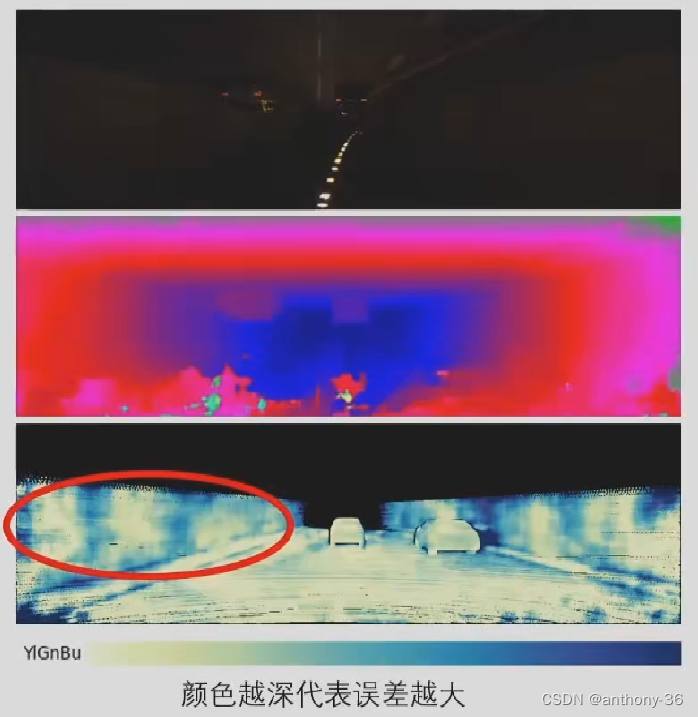
原因分析:在该区域内无法有效提取特征,用于计算匹配误差
改进方法:提高摄像头的动态范围,或者采用可以测距的传感器
具体的仿真过程记录在下一篇里面有。


















 2433
2433

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











