







 文章详细描述了在使用Solidworks安装和使用SW2URDF插件过程中遇到的问题,包括插件无法启动、导出URDF时报错、预览框缺失、拖动条不显示、杆件旋转轴错误、坐标系方向相反以及末端执行器坐标系差异。每个问题都提供了相应的解决方法,如调整插件设置、检查装配体定义、修改URDF文件和坐标系统设置。
文章详细描述了在使用Solidworks安装和使用SW2URDF插件过程中遇到的问题,包括插件无法启动、导出URDF时报错、预览框缺失、拖动条不显示、杆件旋转轴错误、坐标系方向相反以及末端执行器坐标系差异。每个问题都提供了相应的解决方法,如调整插件设置、检查装配体定义、修改URDF文件和坐标系统设置。
问题1:Solidworks安装SW2URDF插件后无法启动
1.1 SW2URDF插件的安装
在https://wiki.ros.org/sw_urdf_exporter下载sw2urdf文件,安装即可
1.2 问题描述
安装好后在插件页面可见到
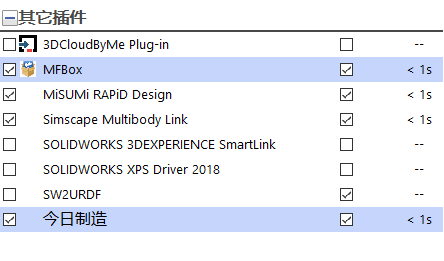
即可见到SW2URDF,但无法完全勾选,每次勾上了再打开插件时就会像图中这样,插件前面的勾没了,sw“工具”菜单栏里也一直找不到导出为URDF的功能
看网上的大佬说时今日制造等外部插件抑制了插件SW2URDF的活动,需要卸载今日制造等插件
1.3 解决办法

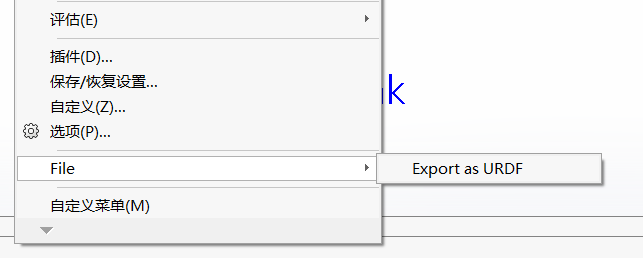
将插件今日制造、沐风工具箱、米思米等前面的对勾均取消,勾上SW2URDF,重启sw,再打开一个装配体的时候在工具菜单栏就能看见我们想要的插件了
(即不需要完全卸载今日制造等,取消对勾就好)
问题2:在点击“preview and export”按钮后,出现报错
2.1问题描述
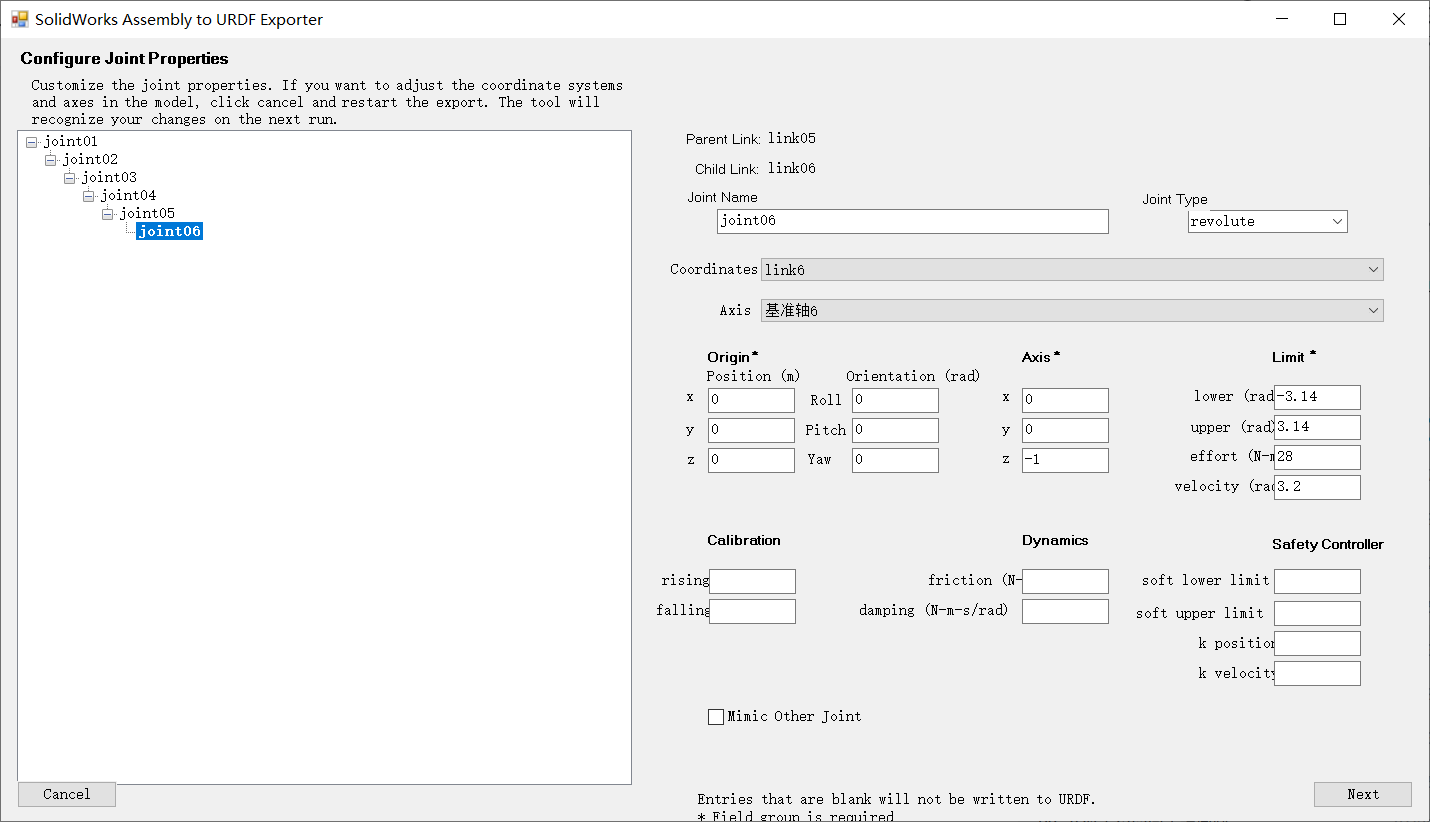
报错:Inferring the joint geometry failed for the joint 1 joint from link 1 link to base link failed.Check that the mates have not fully defined the components in link 1 link and that there is exactly one degree of freedom.
这个错误消息意味着在尝试将SolidWorks装配体导出为URDF文件时,URDF导出器无法推断连接点的几何信息。更具体地说,它指出在连接 base link 到 link 1 的 joint 1 上推断连接几何形状时出现问题。错误信息还建议检查装配体中的紧固件是否完全定义了 Link2 中的组件,并确保连接点上只有一个自由度。
2.2 解决办法
在未彻底搞懂此报错前,我进行了多轮尝试,如修改杆件间的配合,修改自建坐标系的定义等,但都没有效果。
回头检查定义URDF的时候,发现之前定义的旋转轴消失了,重新选中旋转轴即可。
即:你要自己建立好坐标系和旋转轴告诉URDF
问题3建好URDF后不显示预览框
3.1问题描述
没有这个预览框弹出
3.2解决办法
全都做完之后点击右面的那个按钮,才会出导出的界面
问题4:将URDF导入Rviz后不显示拖动条
4.1问题描述
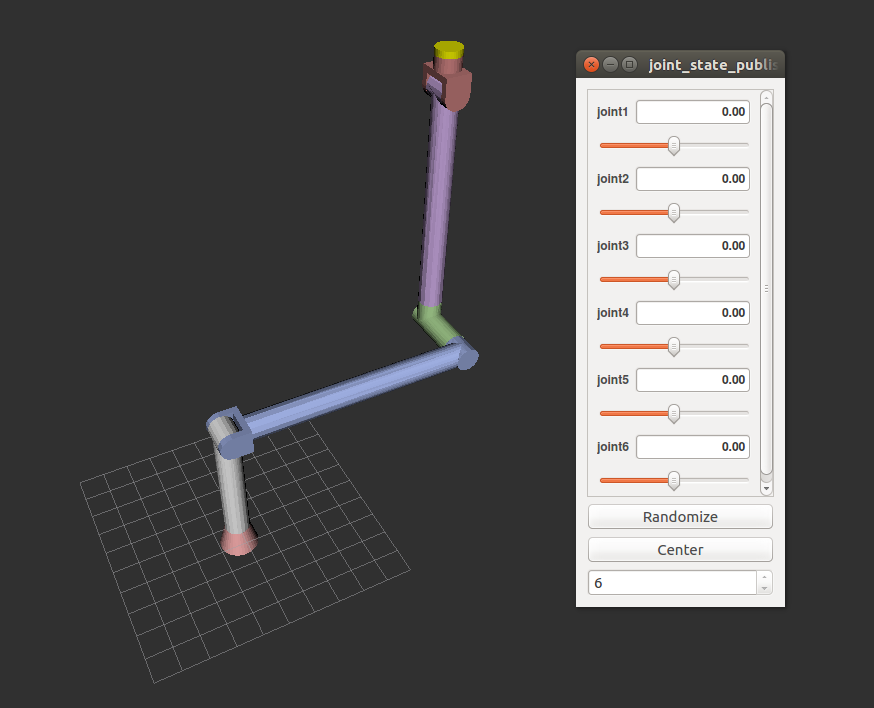
将URDF导入Rviz后不显示joint_state_publisher的拖动条
4.2原因
gui的display被false了
4.3解决办法
打开lunch文件夹中的display.launch文件,将下面代码中的False改为True
<arg
name="gui"
default="False" />拖动条如下:
问题5:导入后发现杆件所绕旋转轴错误
5.1原因
建立坐标位置错误
5.2解决办法
建立坐标系的时候,一定要先建立参考几何体-旋转轴-点,再建立坐标系,且朝向相同,注意坐标系建在连杆的前端,坐标系的原点位于旋转轴上。
问题6:URDF中坐标系方向相反
6.1解决办法
编辑URDF文件,增加一个fixed的世界坐标系,绕z轴旋转180°,在baselink前增加如下代码
<link name="world" />
<joint name="world_joint" type="fixed">
<parent link="world" />
<child link="baselink" />
<origin xyz="0.0 0.0 0.0" rpy="3.1415926536 3.1415926536 0.0" />
</joint>问题7:生成的URDF文件的末端执行器坐标系xy方向与toolbox中的不同
7.1解决办法
将在Robotics Toolbox中建立的坐标系link(6)的offset设置为Π
arm.links(6).offset = pi;
















 268
268

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









