







Ubuntu下Coppeliasim的安装与ROS基本配置
Coppeliasim安装
Ubuntu18.04
Coppeliasim4.1.0
-
在官网下载安装包,得到:

解压后直接就能用了,我这里放在
~/sim_ws/src目录下 -
进入
CoppeliaSim_Edu_V4_1_0_Ubuntu18_04文件夹,
这就是一个文件,直接
./coppeliaSim.sh就可以直接打开了
ROS配置
启动Coppeliasim时,要先启动roscore,这样才能够正常加载ROS插件

启动时注意观察终端输出:有以上两条说明就加载成功了,可以直接与ROS进行通信。根据官网也可以知道我安装的这个版本已经包含了所需的文件。

要说的是,这里面提到的一些文件,文件夹我没找到。我暂时没管
至此其实已经完成了基本的环境配置,如果有ROS插件加载失败的同学,可以看看官网教程以及别的博客。
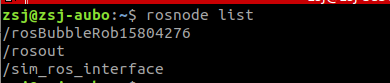
Coppeliasim中的ROS节点
用两个图做对比:
- 空白的Coppeliasim场景

- 加载并运行controlTypeExamples/controlledViaRos.ttt后
表面上看,Coppeliasim中的节点,好像只需要在场景中对脚本进行编程就行。
实际上这种说法不对
后面的文章会分析节点的写法。














 3062
3062











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









