







机器人运动轨迹学习——GMM/GMR算法
-
前置知识
GMM的英文全称为:
Gaussian mixture model,即高斯混合模型,也就是说,它是由多个高斯模型进行混合的结果:当然,这里的混合是带有权重概念的。-
一维高斯分布
GMM中的个体就是高斯模型,说认真点就是高斯基函数,它还有另一个名字,径向基函数。
对于一维变量,其高斯分布为:
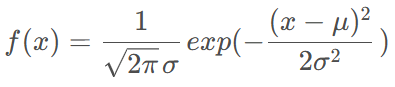
对应高斯概率密度的图形:
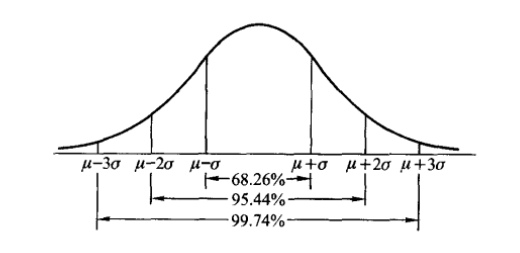
也就是说,对于一维变量x,它落在均值区间 [ u − σ , u + σ ] [u-\sigma, u+\sigma] [u−σ,u+σ]的概率为68.26%
-
多维高斯分布
多维 Gaussian 分布的概率密度函数为:

其中 μ \mu μ为均值向量, Σ \Sigma Σ为协方差矩阵
-
-
GMM对复杂轨迹的拟合
一个复杂运动的表达式可由一系列简单信号的加权组合表述,我们称这些简单信号为基函数;
一些流行的基函数有:
Radial Basis Functions (RBFs),Bernstein Basis Functions,Fourier Basis Functions其中,
Radial Basis Functions (RBFs),即径向基函数,一种应用如下图所示:通过为各基函数赋予不同的权重,生成了一条相对复杂的轨迹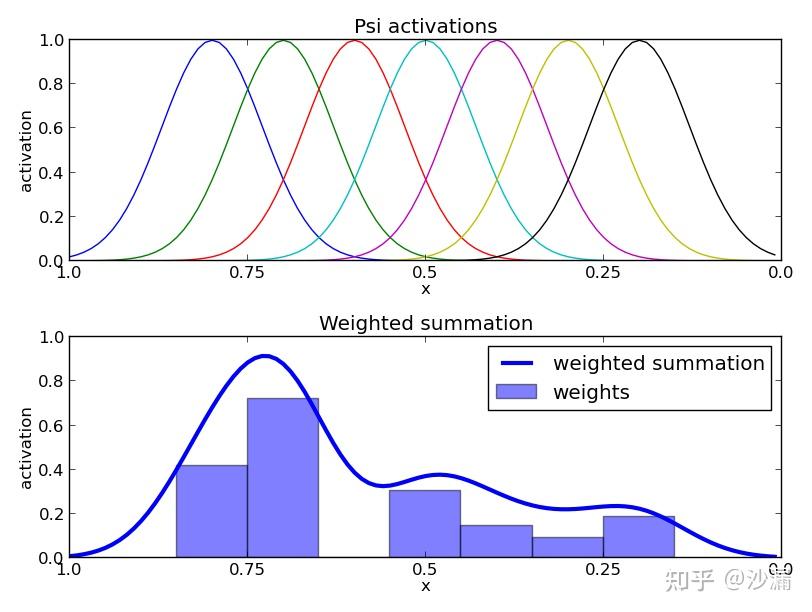
图片源自:Dynamic Movement Primitives介绍及Python实现与UR5机械臂仿真 - 知乎 (zhihu.com)
-
GMR的回归思想
GMR(
Gaussian mixture regression)的思想:对于一个输入,借用GMM进行回归,回归的结果是一个高斯分布,
也就是说,我们回归得到的结果不是一个固定的值,而是一个概率值
以一维高斯分布为例:
我们回归得到的结果其均值为 μ \mu μ,在 [ u − σ , u + σ ] [u-\sigma, u+\sigma] [u−σ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 308
308

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









