 lidar_align源码下载、编译及标定流程
lidar_align源码下载、编译及标定流程








1、下载lidar_align源码
ethz-asl/lidar_align: A simple method for finding the extrinsic calibration between a 3D lidar and a 6-dof pose sensor (github.com) https://github.com/ethz-asl/lidar_align2、解压到ros工作空间目录下的src文件中
https://github.com/ethz-asl/lidar_align2、解压到ros工作空间目录下的src文件中
不知道如何创建ros工作空间的可以参考我另一篇博客:
3、编译
sudo apt-get install libnlopt-dev
cd ~/catkin_ws
catkin_make此时编译可能会遇到一些问题,比如:
CNake Error at /usr /share/cnake-3.10/Nodules/FindPackageHandlestandardArgs.cmake:137 (nessage);could NOT find NLOPT (missing: NLOPT_INCLUDE_DIR NLOPT_LIBRARY)
Call stack (most recent call first):
/usr/share/cnake-3.10/NModules/FindPackageHandleStandardArgs.cnake:378(_FPHSA_FAILURENLOPTConfig.cmake:65 (find_package_handle_standard_args)
CMakeLists.txt: 18 (find_package)
-- Configuring incomplete, errors occurred!
see also "/home/findlab/lidar_align-naster/build /CMakeFiles/CNakeoutput.log".See also "/hone /findlab/lidar_align-naster/build/CMakeFiles/CNakeError.log".

解决办法:
在lidar_align-master文件夹中的CMakeLists.txt添加以下代码:
list(APPEND CMAKE_FIND_ROOT_PATH ${PROJECT_SOURCE_DIR})
set (CMAKE_PREFIX_PATH "/usr/local/lib/cmake/nlopt")最后应该就编译成功了,如果还遇到编译问题,可以参考一下我另一篇博客,里面总结了几个可能遇到的问题解决办法:
roscore
source devel/setup.bash
roslaunch lidar_align lidar_align.launch
此时可能会遇到一些问题
问题1:
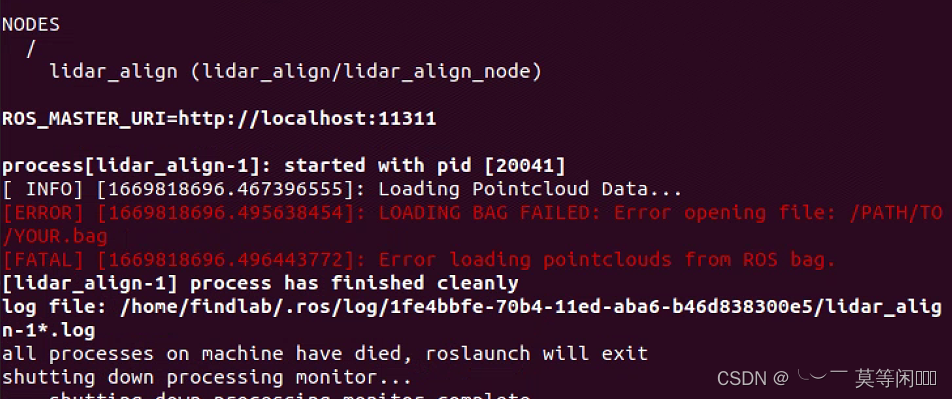
解决办法:
修改launch文件,改为自己的bag路径

问题2:
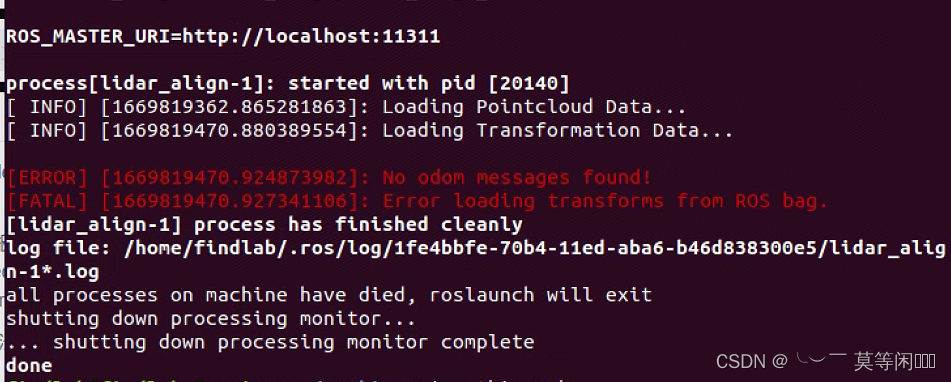
解决办法:
修改loader.cpp文件
将以下代码放到该文件的对应位置,并将odom的代码删除或注释掉
std::vector<std::string> types;
types.push_back(std::string("sensor_msgs/Imu"));
rosbag::View view(bag, rosbag::TypeQuery(types));
size_t imu_num = 0;
double shiftX=0,shiftY=0,shiftZ=0,velX=0,velY=0,velZ=0;
ros::Time time;
double timeDiff,lastShiftX,lastShiftY,lastShiftZ;
for (const rosbag::MessageInstance& m : view){
std::cout <<"Loading imu: \e[1m"<< imu_num++<<"\e[0m from ros bag"<<'\r'<< std::flush;
sensor_msgs::Imu imu=*(m.instantiate<sensor_msgs::Imu>());
Timestamp stamp = imu.header.stamp.sec * 1000000ll +imu.header.stamp.nsec / 1000ll;
if(imu_num==1){
time=imu.header.stamp;
Transform T(Transform::Translation(0,0,0),Transform::Rotation(1,0,0,0));
odom->addTransformData(stamp, T);
}
else{
timeDiff=(imu.header.stamp-time).toSec();
time=imu.header.stamp;
velX=velX+imu.linear_acceleration.x*timeDiff;
velY=velX+imu.linear_acceleration.y*timeDiff;
velZ=velZ+(imu.linear_acceleration.z-9.801)*timeDiff;
lastShiftX=shiftX;
lastShiftY=shiftY;
lastShiftZ=shiftZ;
shiftX=lastShiftX+velX*timeDiff+imu.linear_acceleration.x*timeDiff*timeDiff/2;
shiftY=lastShiftY+velY*timeDiff+imu.linear_acceleration.y*timeDiff*timeDiff/2;
shiftZ=lastShiftZ+velZ*timeDiff+(imu.linear_acceleration.z-9.801)*timeDiff*timeDiff/2;
Transform T(Transform::Translation(shiftX,shiftY,shiftZ),
Transform::Rotation(imu.orientation.w,
imu.orientation.x,
imu.orientation.y,
imu.orientation.z));
odom->addTransformData(stamp, T);
}
} 
问题3:
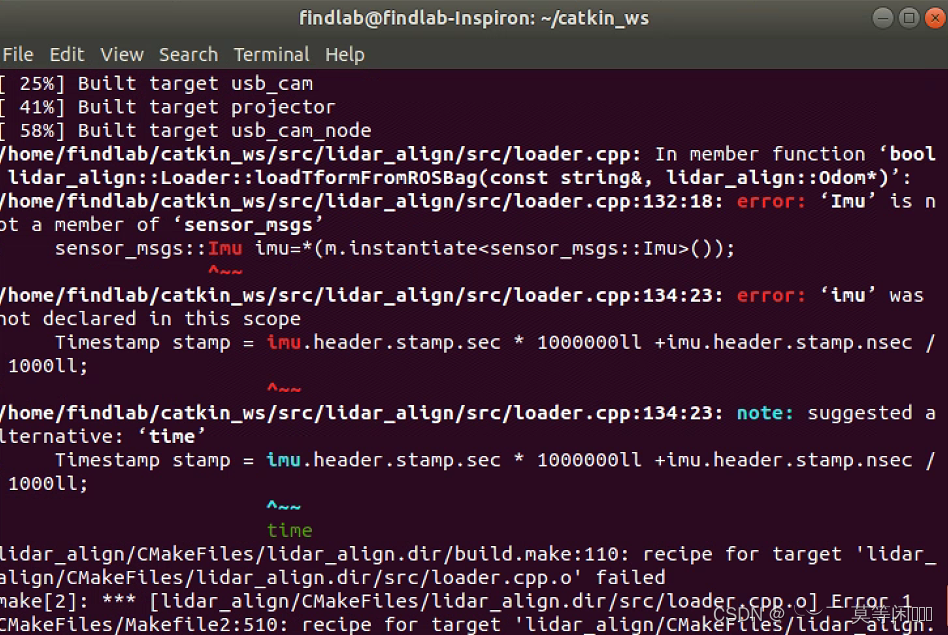
解决办法:
在loader.h头文件中定义Imu消息即可
#include <sensor_msgs/Imu.h>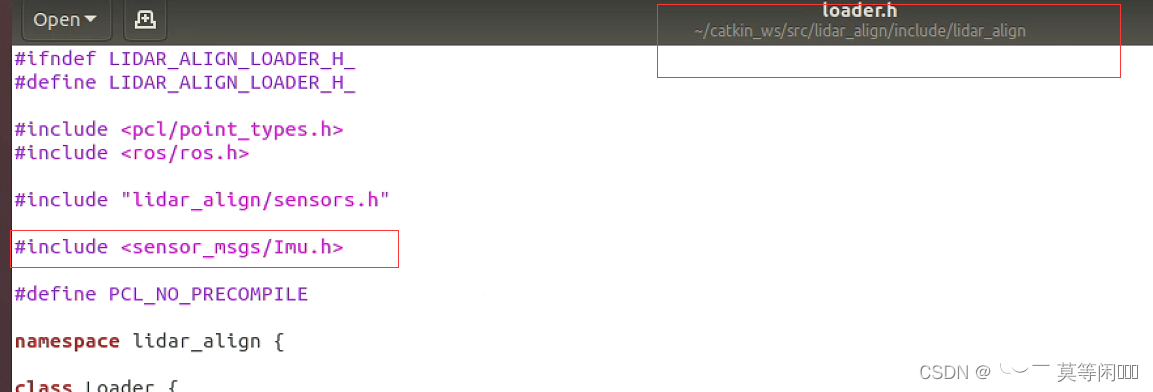
然后再重新编译catkin_make

此时应该编译没问题了
再执行roslaunch lidar_align lidar_align.launch
可能还会再次遇到问题
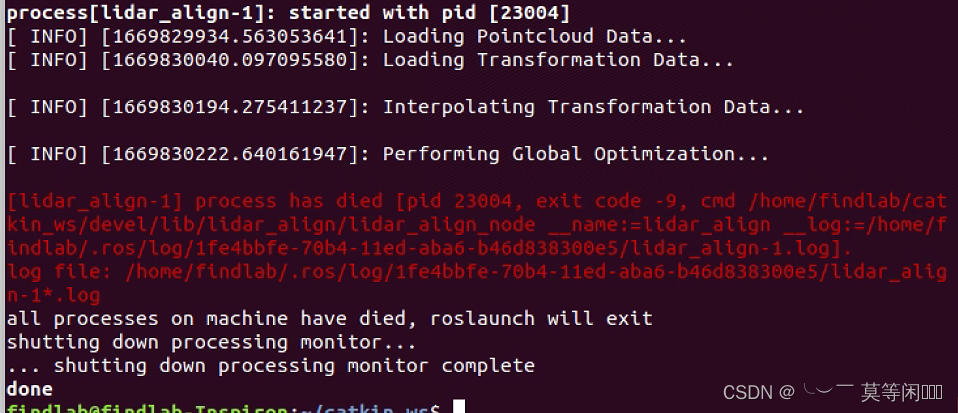
原因是点云序列号超出范围
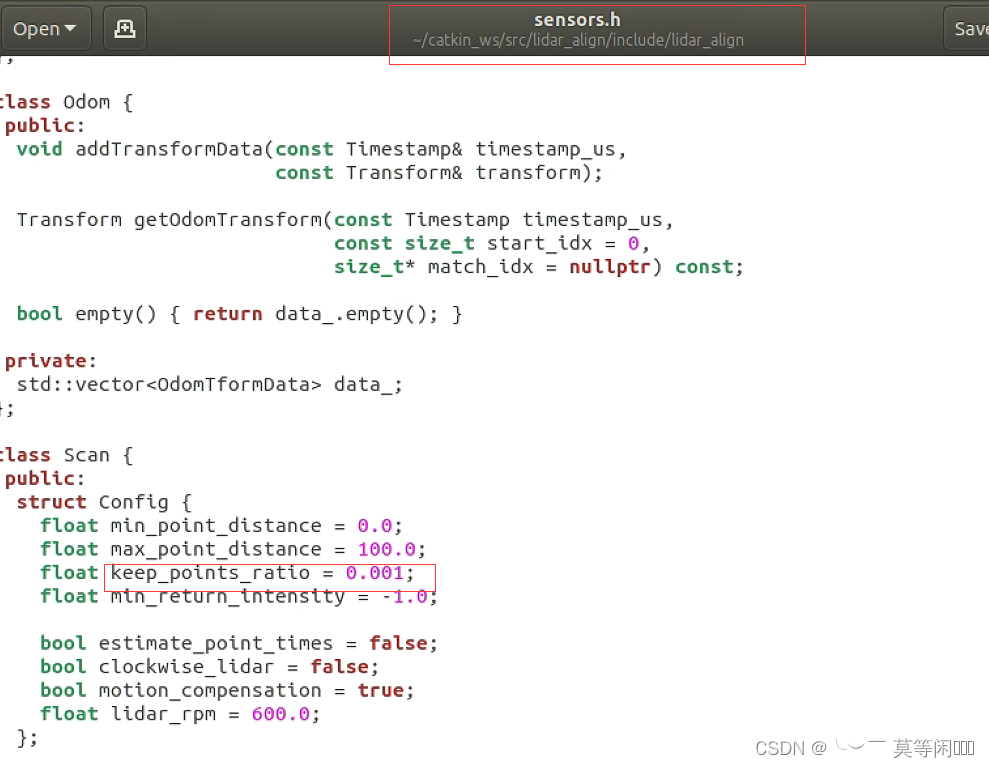
解决办法:在sensor.h头文件中将keep_points_ratio的默认值0.01改小,比如改成0.001.
最终成功标定了
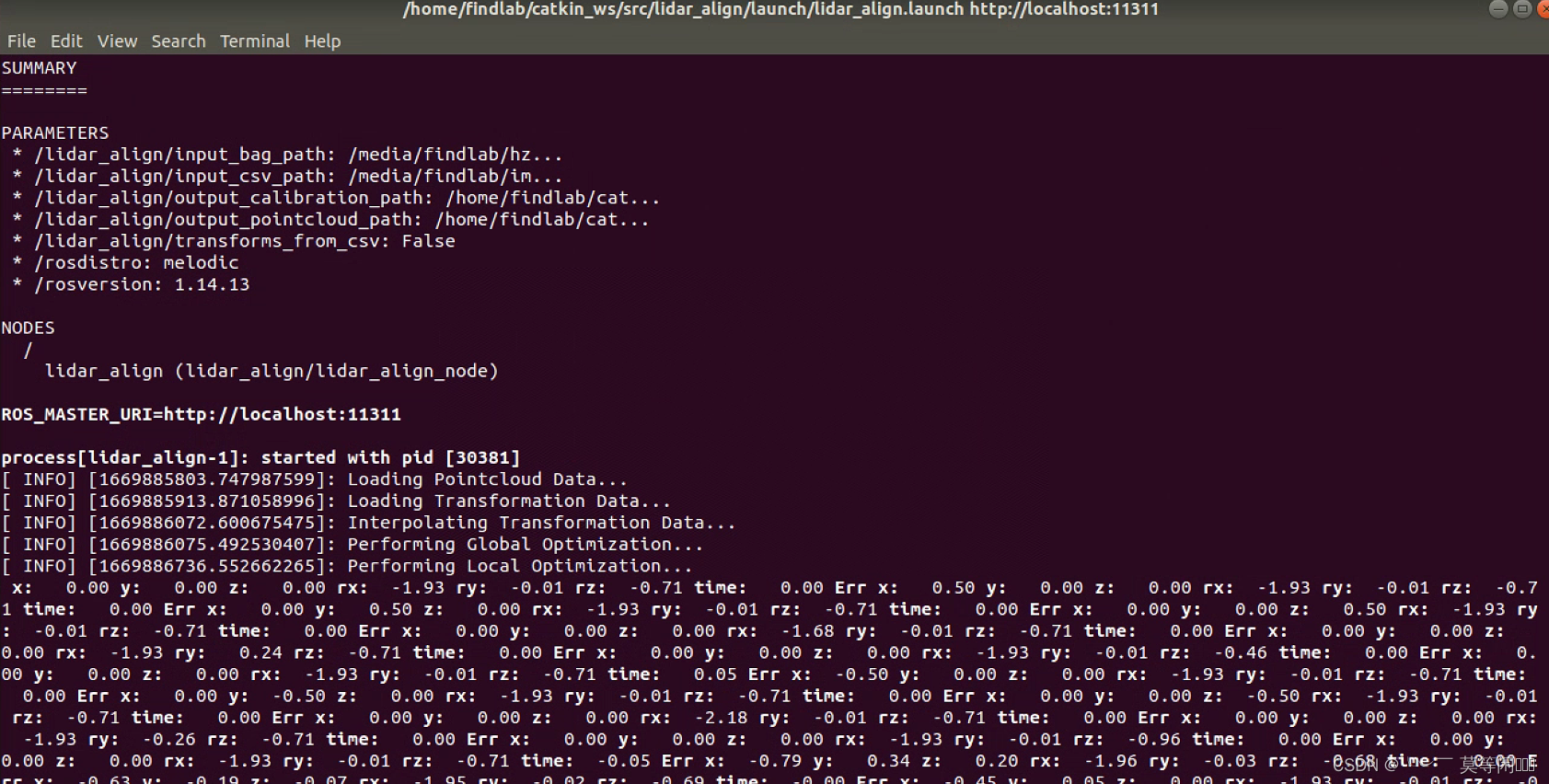
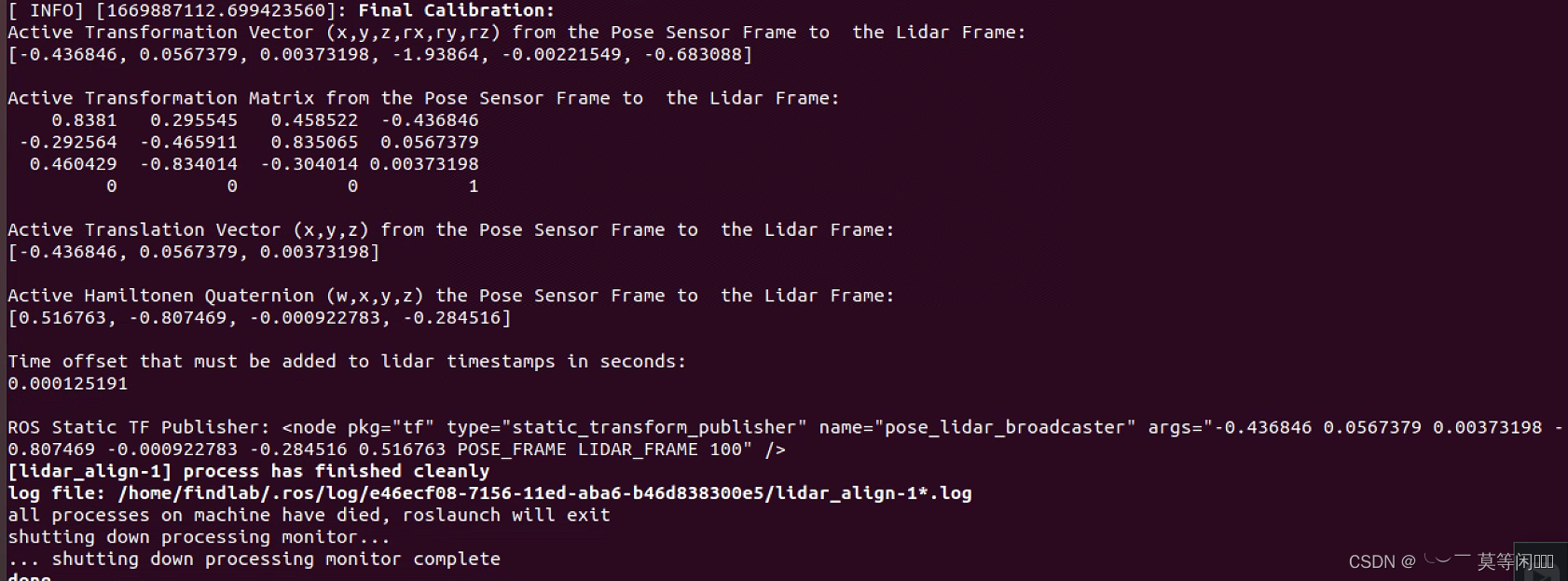
最终的标定结果文件存放在lidar_align目录下的results文件夹中



















 950
950

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











