






实验平台:MATLAB中的simulink工具箱,使用continuous库中的PID模块。

1.使用PID Tuner设计PID控制器
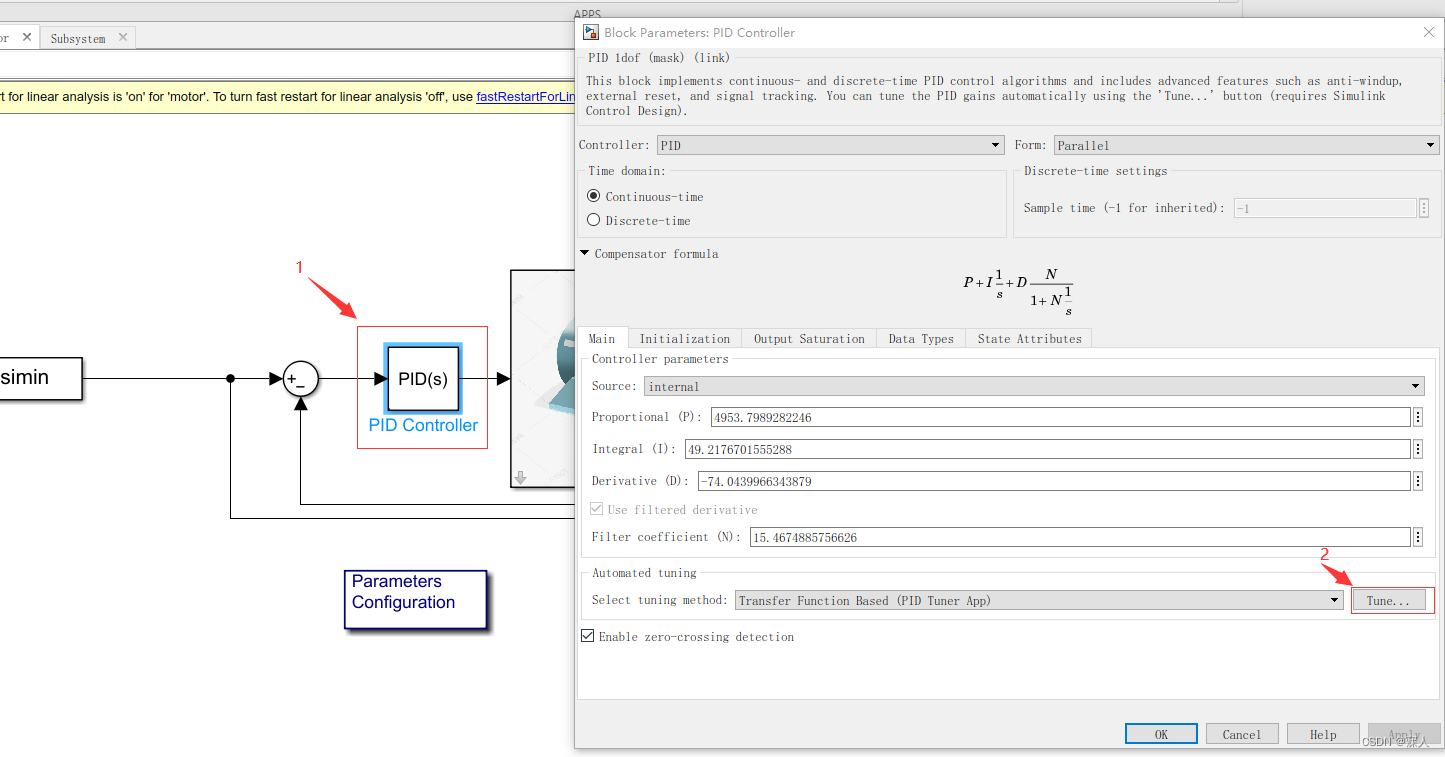
1.1双击PID模块,再点击Tune按键
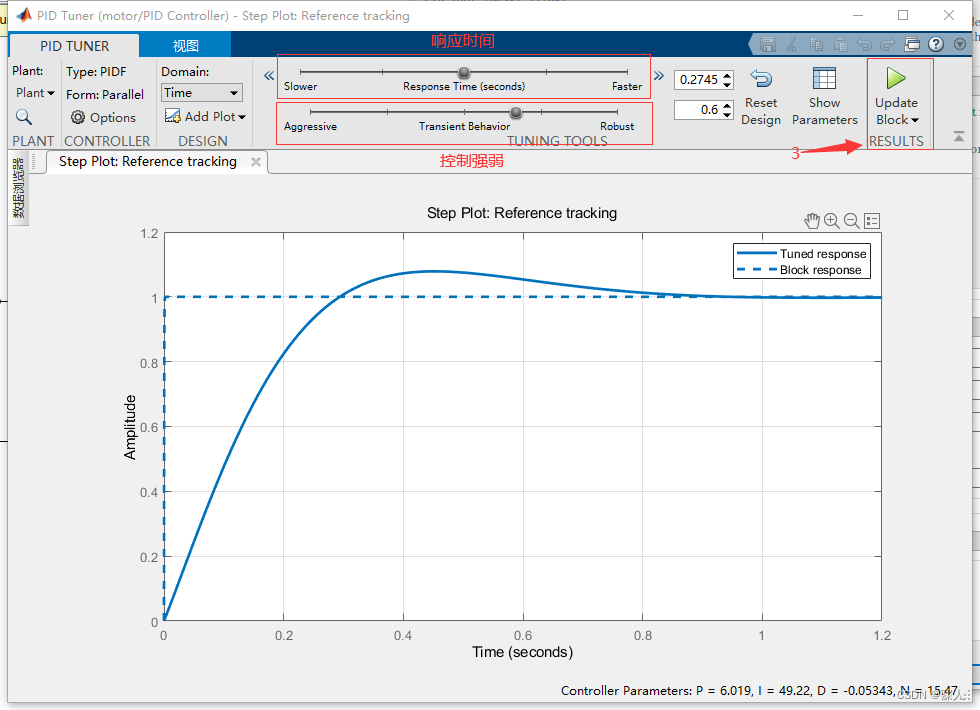
1.2点击更新按键
数据就更新到模块中了,左边的show parameters可以查看PID参数。(可以拖动相应时间进度条,加快响应时间,后面的方框也可以直接输入响应时间,但也不要太快,太快PID会非常大。控制强弱不会用)
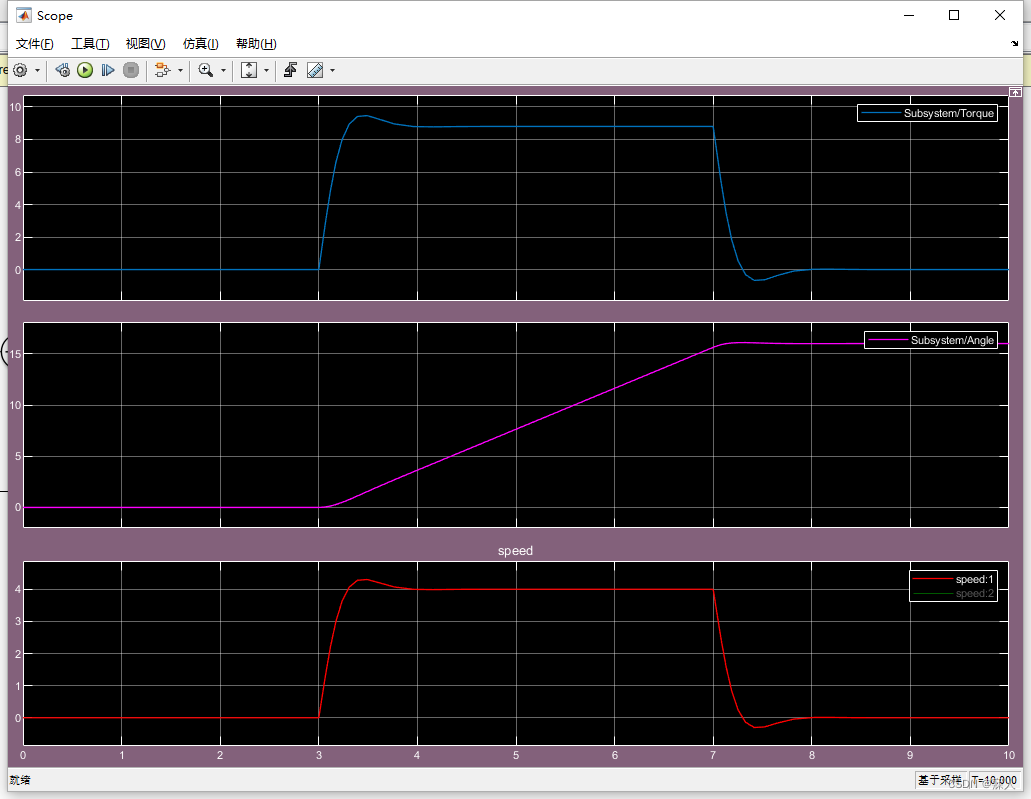
1.3效果
2.用伯德图法设计PID控制器
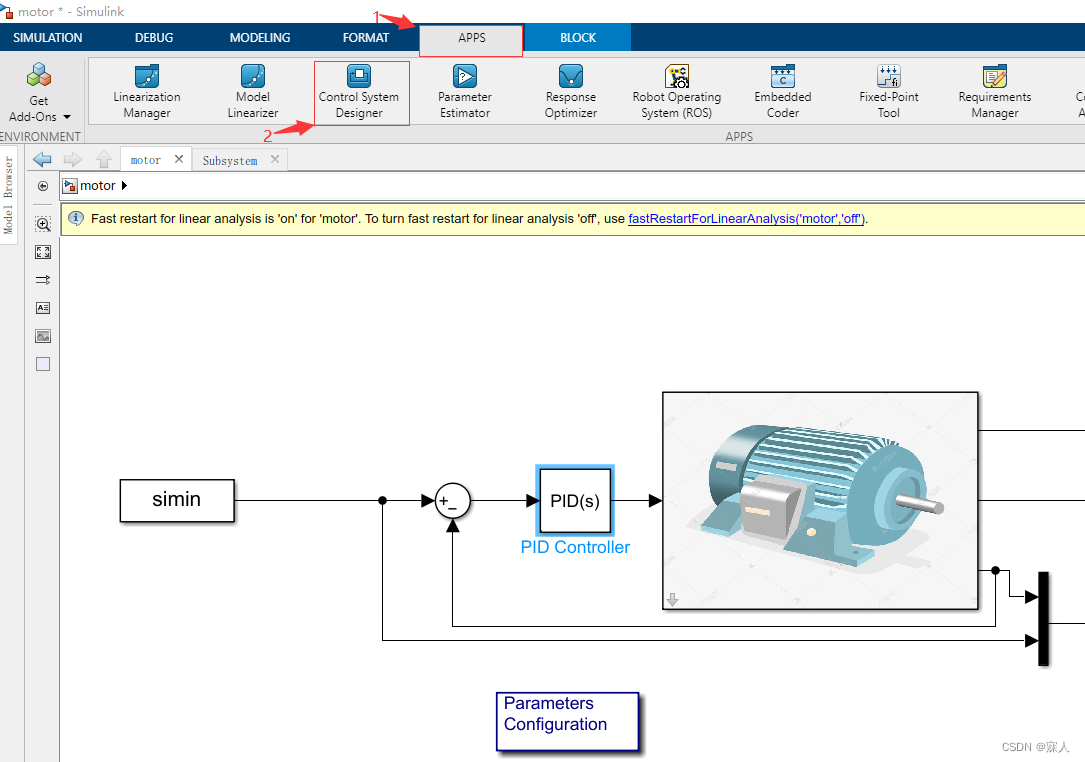
2.1单击APPS,再单击Control System Designer。
2..2点击添加块,再点击仿真模型,然后添加控制器,最后确认;
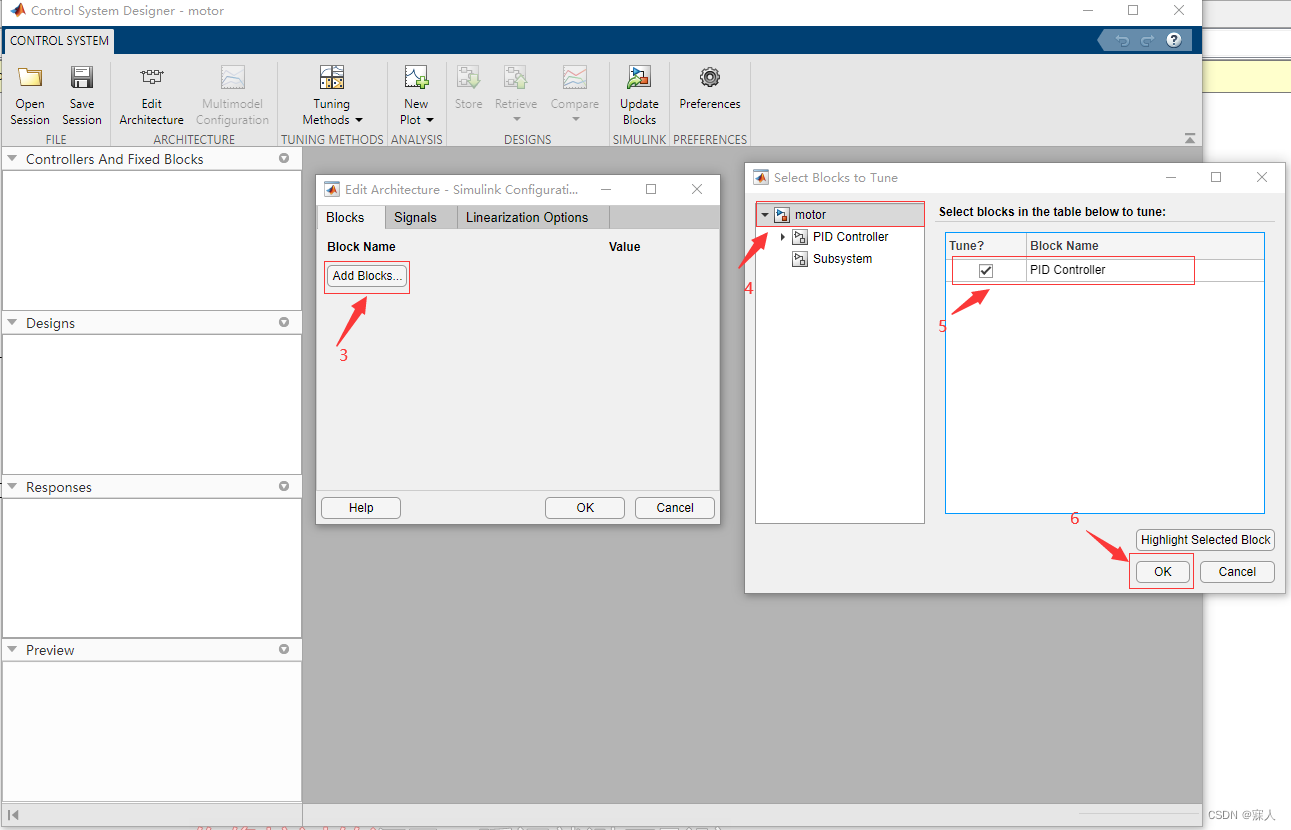
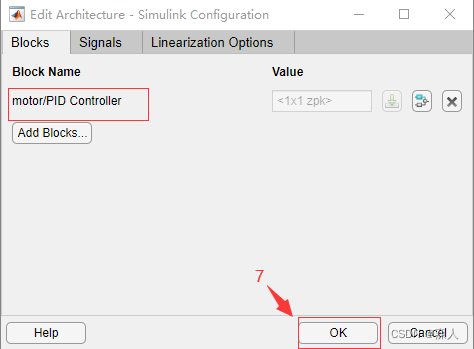
2.3添加成功后,点击OK;
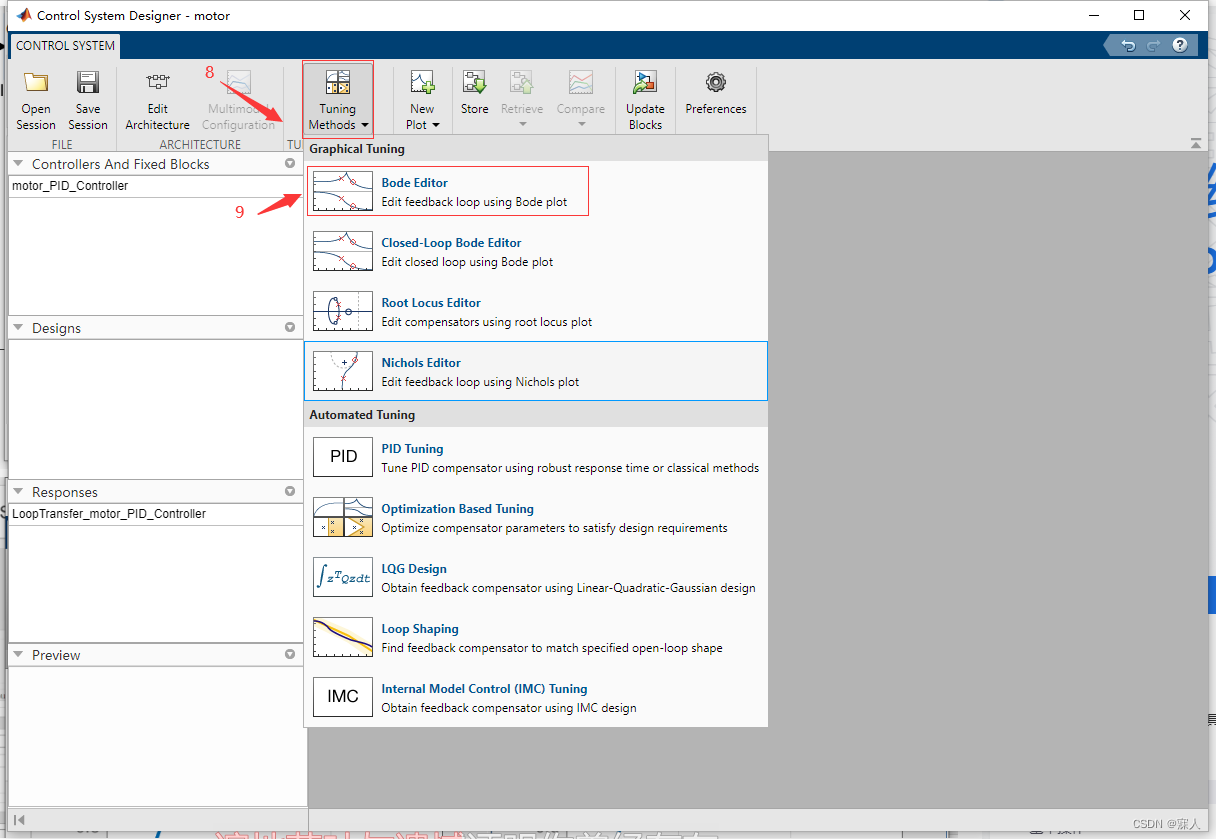
2.4单击Tuning Methods,再点击Bode Editor;
 2.5选择当前PID控制器,点击plot;
2.5选择当前PID控制器,点击plot;

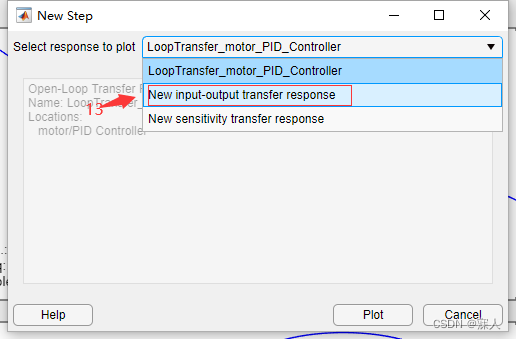
2.6单击New Plot,选择New Step;

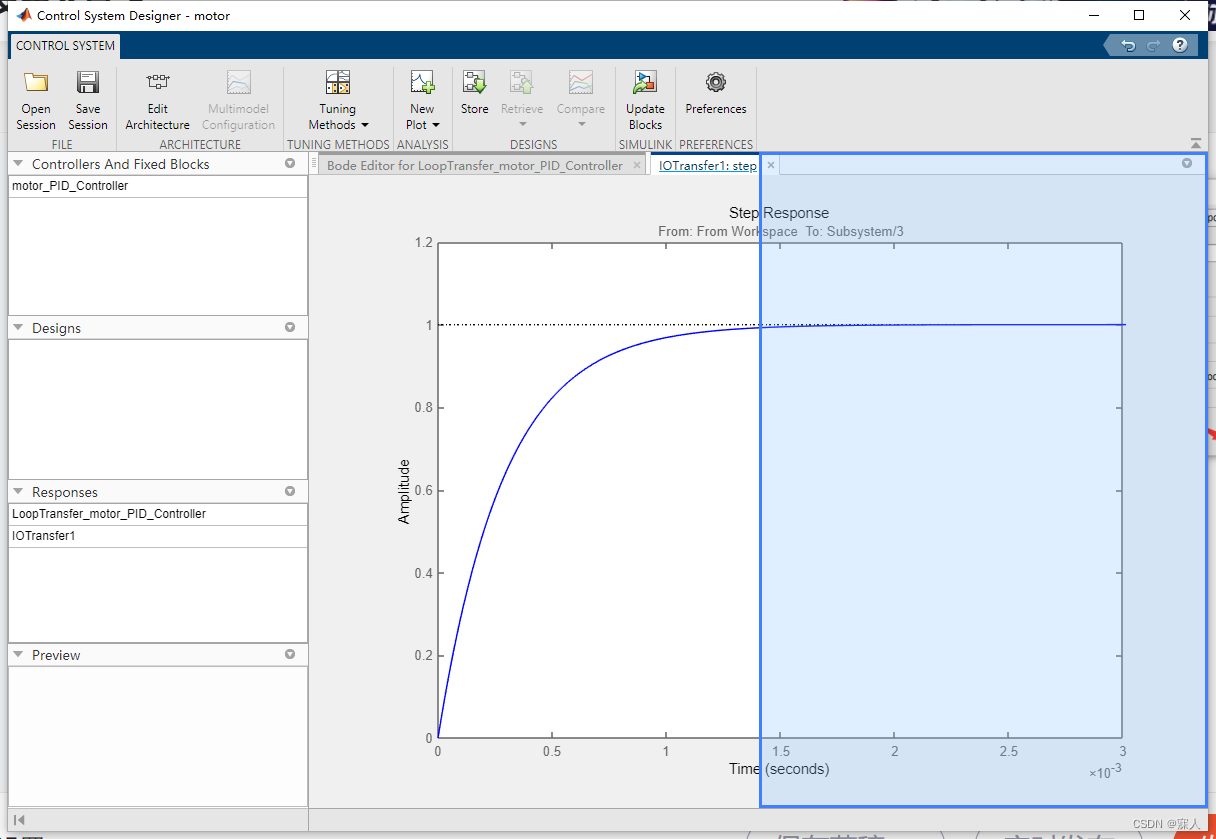
2.7选择新的输入输出关系,从仿真图中选择输入输出线,确认添加,最后点击绘图;



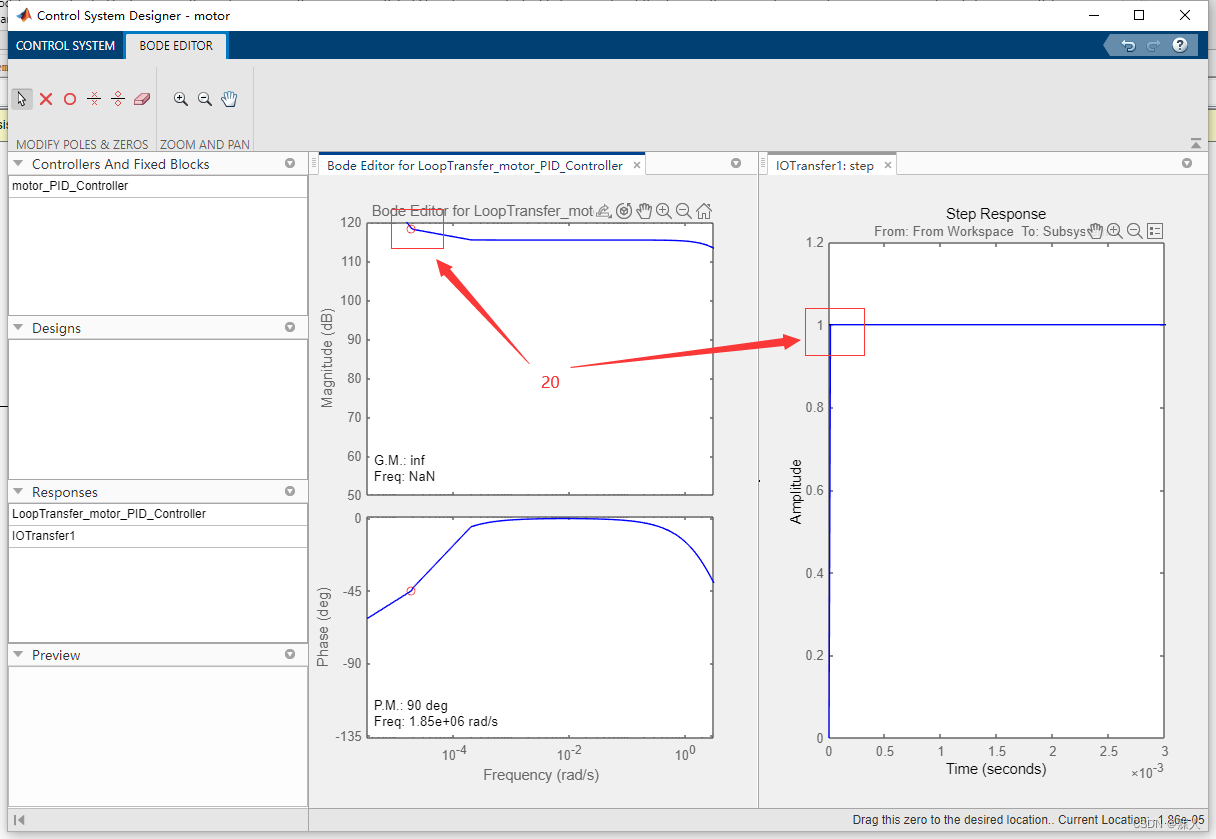
2.8使两个图同时显示,将新图放在右侧。用鼠标拖动极点(红色圆圈),是右侧曲线彻底贴合虚线;

2.9点击更新数据,不用保存文件(也可以保存,方便以后调试)。
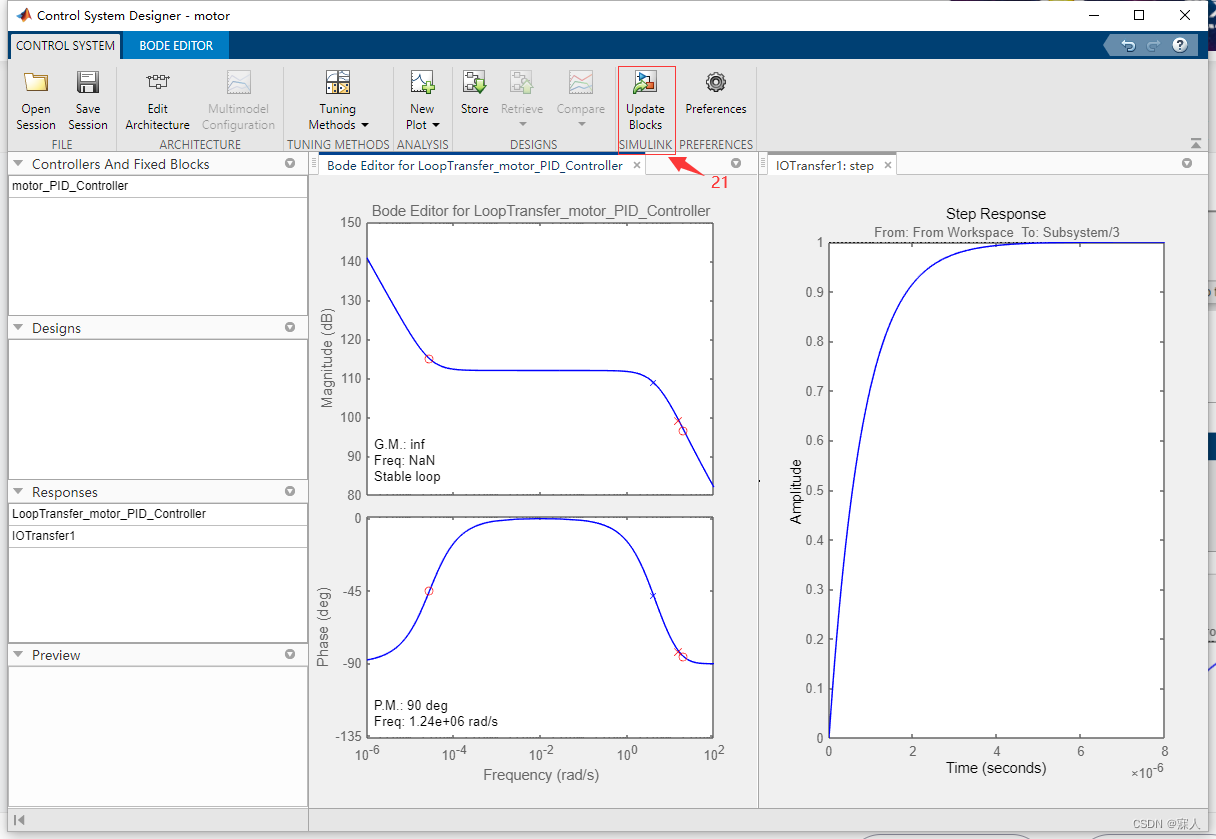
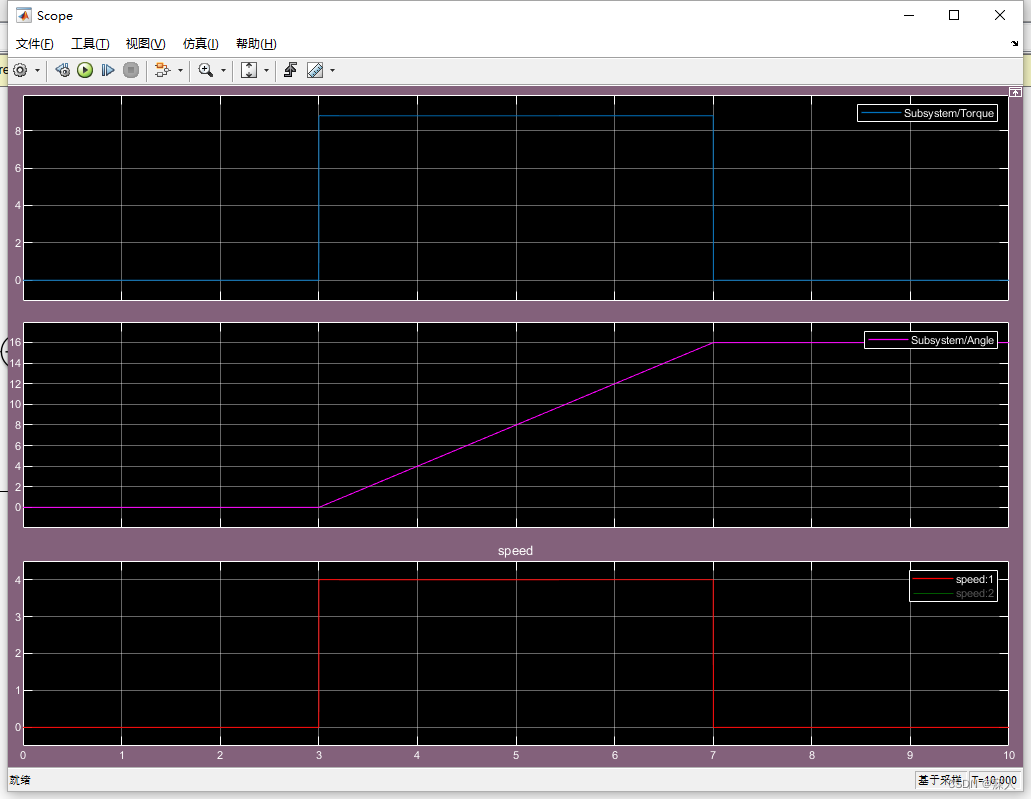
2.10效果















 1038
1038











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









