






首先在右上角有线网络设置中,配置当前的有线连接
具体就是设置当前有线网络,更改ipv4连接方式为手动,地址为192.168.1.100,子网掩码255.255.255.0,网关192.168.1.1。

建立工作空间, GitHub - ros-drivers/velodyne: ROS support for Velodyne 3D LIDARs。
连接激光雷达
给激光雷达供电后,用网线连接至电脑,电脑会自动连接至之前配置的有线网络,在连接好后,用浏览器打开192.168.1.201,会有激光雷达的配置界面,此时,还不能velodyne直接打开雷达。
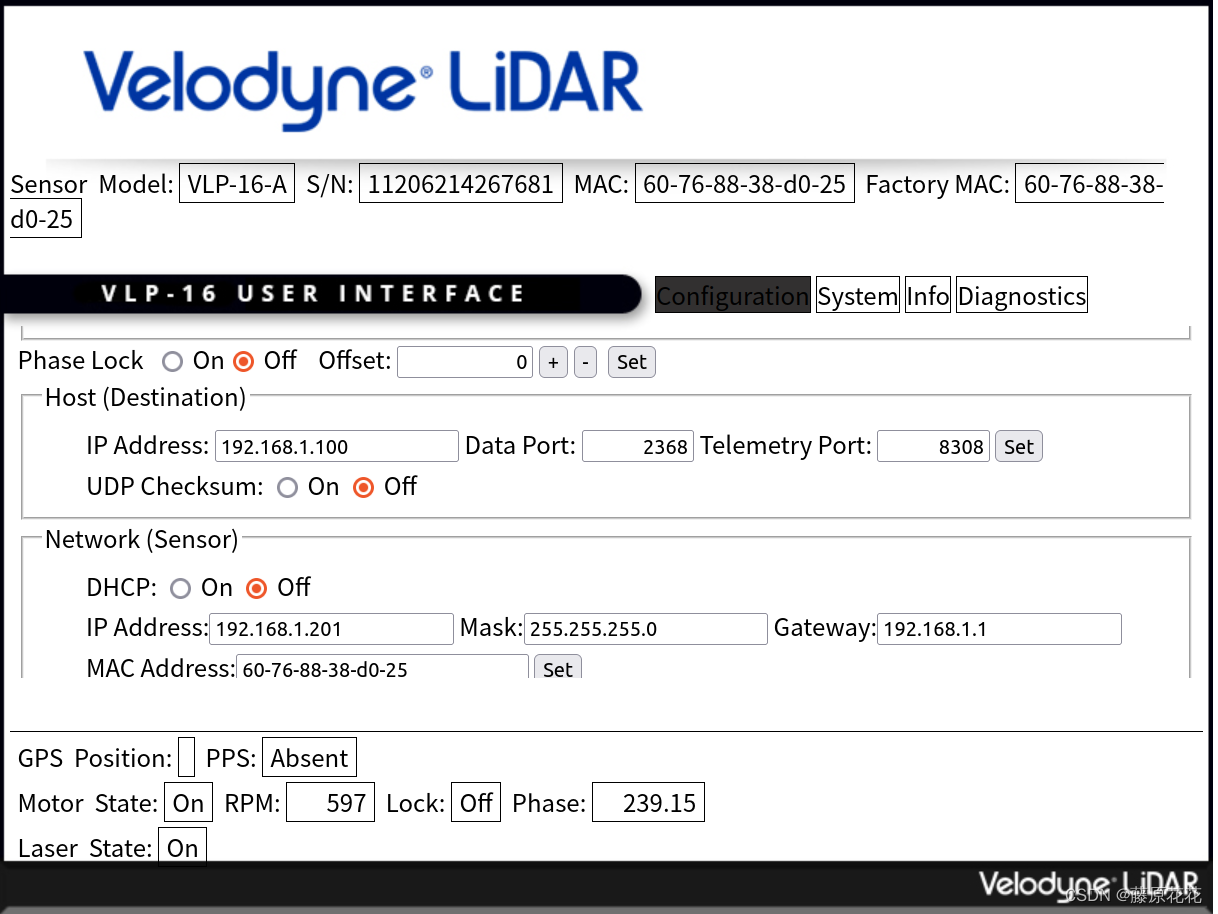
在雷达配置界面,Host(Destination)应该和我们自己设置的ipv4的地址相同,Network(Sensor)就是激光雷达自己的ip地址。
然后就可以用velodyne包打开激光雷达了。
在终端运行以下命令
roslaunch velodyne_pointcloud VLP16_points.launch注意:雷达的ip地址是192.168.1.201而不是自己设置的ip地址,在launch文件里的“device_ip”等于“192.168.1.201”,否则会连接上但是打不开。
现在,必要的节点正在运行。您可以使用以下命令检查
rosnode list您将可以看到以下主题的发布和订阅信息:
rostopic echo /velodyne_points之后,启动rviz,将 "velodyne "作为固定框架:
rosrun rviz rviz -f velodyne1.在 "显示 "面板中点击 "添加",然后选择 "Point Cloud2",再点击 "确定"。
1.在新的 "Point Cloud2 "选项卡的 "Topic "字段中输入"/velodyne_points"。
3.您的Velodyne已经准备好在您的系统中构建 "真实 "世界了。请尽情享受吧
参考文献:
velodyne/Tutorials/Getting Started with the Velodyne VLP16 - ROS Wiki
















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









