






目录
far_planner简介
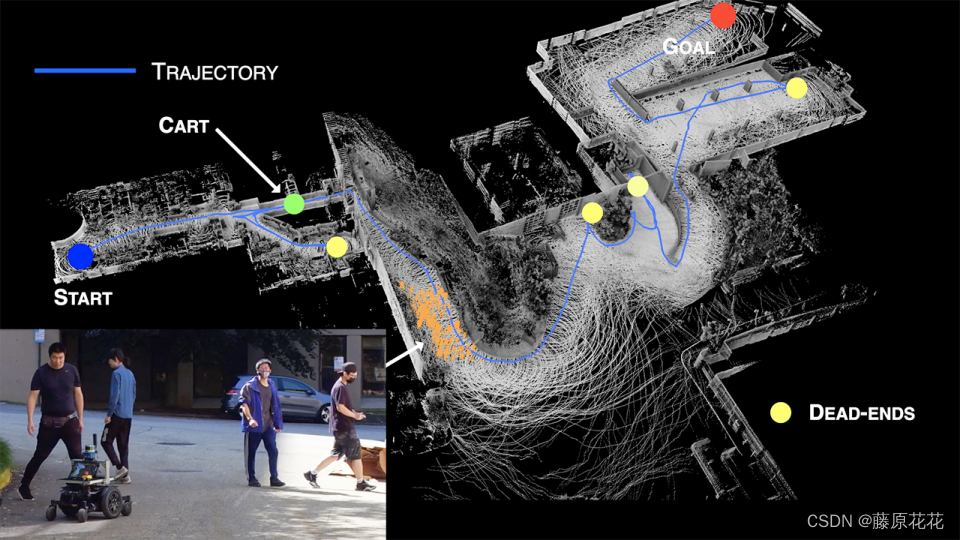
FAR Planner 使用动态更新的可见度图来快速重新规划。规划器用多边形建立环境模型,并在导航的同时建立全局可见度图。规划器能够处理已知和未知环境。在已知环境中,路径是根据先前的地图规划的。在未知环境中,则会根据导航过程中观察到的环境尝试多条路径,引导车辆到达目标。当存在动态障碍物时,FAR Planner 会断开被动态障碍物阻挡的可见性边缘,并在恢复可见性后重新连接。软件实现使用两个 CPU 线程,一个用于动态更新可见性图,使用约 20% 的线程,另一个用于路径搜索。
该版本库已在 Ubuntu 18.04 和 Ubuntu 20.04 中分别使用 ROS Melodic 和 ROS Noetic 进行了测试。
far_planner编译安装
楼主的系统是ubuntu20.04,以下以此系统作为研究基础。
首先应下载Autonomous Exploration Development Environment,far_planner基于该自主探索研发环境运行,该环境旨在利用系统开发和机器人部署,进行地面自主导航和探索。它包含各种模拟环境、自主导航模块(如避免碰撞、地形可穿越性分析、航点跟踪等)和一套可视化工具,用户可以开发自主导航系统,然后将这些系统移植到真实机器人上进行部署。
使用以下命令行安装依赖项
sudo apt update
sudo apt install libusb-dev克隆开源资源库
git clone https://github.com/HongbiaoZ/autonomous_exploration_development_environment.git在终端中进入文件夹,选中与电脑设置相匹配的分支。将 "distribution "替换为 "melodic "或 "noetic"。然后编译。
cd autonomous_exploration_development_environment
git checkout distribution
catkin_make运行脚本下载模拟环境(约 500MB)。这可能需要几分钟时间。如果脚本没有启动下载,用户可以下载模拟环境并解压缩到 "src/vehicle_simulator/meshes"。
./src/vehicle_simulator/mesh/download_environments.sh然后再下载far_planner。
git clone https://github.com/MichaelFYang/far_planner在终端中,进入文件夹并编译。
cd far_planner
catkin_make完成安装后,要运行代码,请开启两个终端,一个终端运行
source devel/setup.sh
roslaunch vehicle_simulator system_<environment>.launch其中,<environment>可替换为自主研发环境中自带的仿真环境,如campus,forest,garage,indoor,tunnel。
如果要在真实机器人上运行,应启动以下代码,这将不会启动仿真环境。
roslaunch vehicle_simulator system_real_robot.launch另一个终端运行
source devel/setup.sh
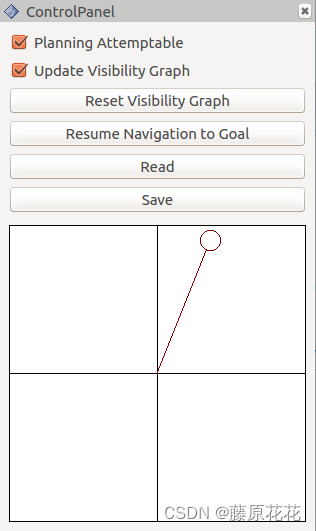
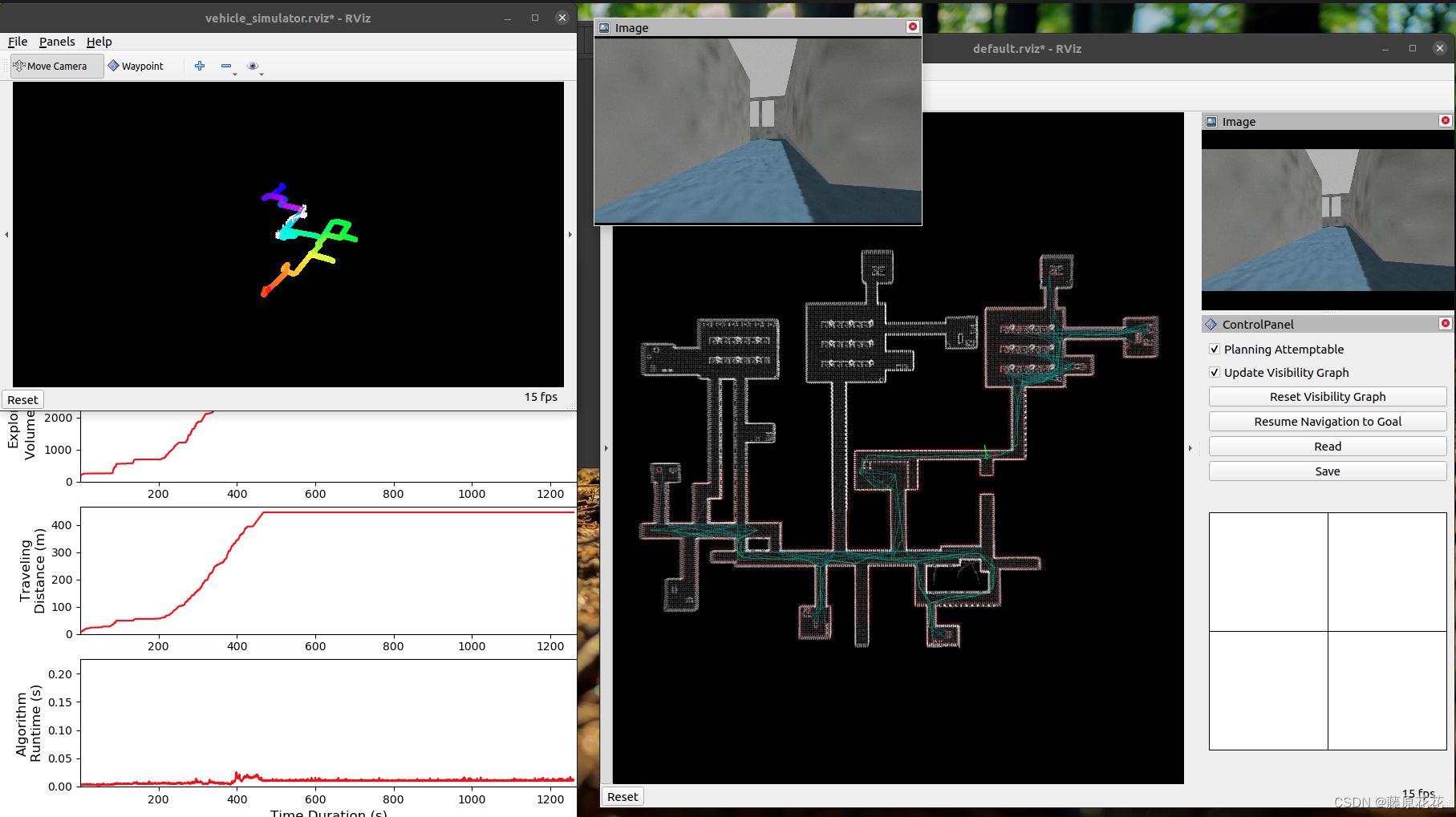
roslaunch far_planner far_planner.launch现在,用户可以通过按下 RVIZ 中的 "目标点 "按钮发送目标,然后点击一个点来设置目标。车辆将导航至目标点,并沿途绘制能见度图(青色)。可见度图所覆盖的区域将成为自由空间。在自由空间中导航时,规划器会使用建立的可见度图;在未知空间中导航时,规划器会尝试探索通往目标的道路。按下 "重置可见度图 "按钮,规划器将重新初始化可见度图。取消选中 "可尝试规划 "复选框后,规划器将首先尝试在自由空间中寻找路径。路径将显示为绿色。如果不存在这样的路径,规划器将一并考虑未知空间。路径将显示为蓝色。取消选中 "更新可见度图 "复选框,规划器将停止更新可见度图。要从文件中读取/保存可见度图,请按 "读取"/"保存 "按钮。室内环境的能见度图文件示例位于 "src/far_planner/data/indoor.vgh"。
用户也可以运行 ROS 节点来发送一系列航点。在另一个终端中,进入文件夹并获取 ROS 工作区的源代码,然后使用下面的命令行运行 ROS 节点。ROS 节点还会发送导航边界和速度。车辆将按照航点在边界内导航。在autonomous_exploration_development_environment文件夹下运行:
roslaunch waypoint_example waypoint_example_garage.launchfar_planner遥控小车
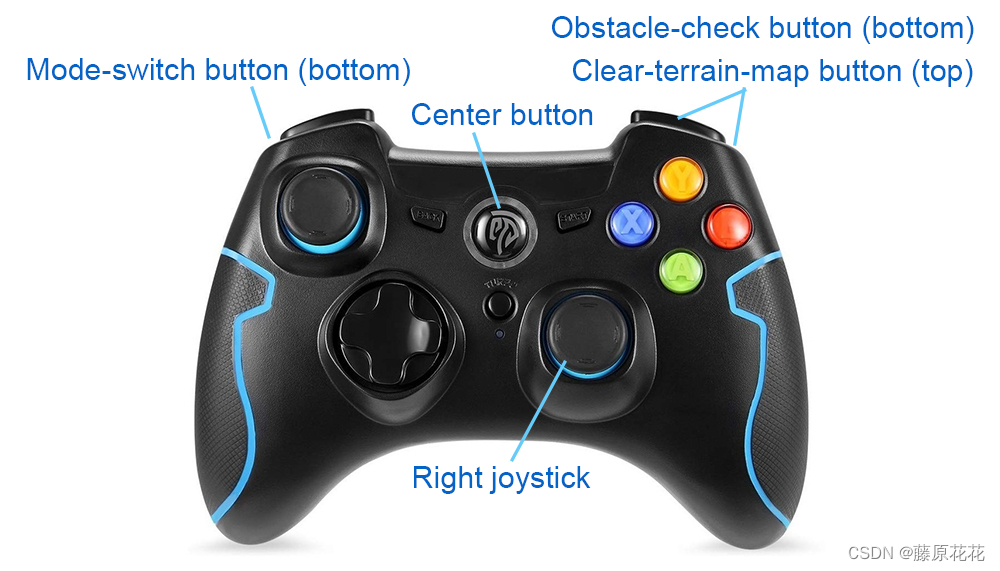
在导航过程中,用户可以随时使用控制面板,通过点击黑框中的按钮来导航车辆。系统将切换到智能操纵杆模式--车辆会尝试执行虚拟操纵杆指令,同时避免碰撞。要恢复 FAR Planner 导航,请按 "恢复导航至目标 "按钮或使用 "目标点 "按钮设置新目标。请注意,用户可以使用 PS3/4 或 Xbox 控制器代替虚拟操纵杆。
考虑到大多数人没有游戏手柄,可以考虑通过使用键盘节点来连接/cmd_vel,从而实现键盘控制仿真环境中的小车运动。
首先下载键盘控制节点
sudo apt-get install ros-noetic-teleop-twist-keyboard但是far_planner的/cmd_vel的消息格式是geometry_msgs/TwistStamped,而teleop_twist_keyboard的消息类型是geometry_msgs/Twist,因此需要做一个消息类型的转换。感谢github上的热心网友添加的代码,我们可以打开/opt/ros/noetic/lib/teleop_twist_keyboard/teleop_twist_keyboard.py,将下面的代码直接覆盖在原文件上。
https://github.com/AndreasNagel/teleop_twist_keyboard/blob/08198a3b20e2245ee160ee274b6dad80b75e2af0/teleop_twist_keyboard.py因为opt文件夹下的文件可能是没有权限进行更改的,可以打开终端更改其权限
sudo chmod 777 文件名之后,在py文件的第22行将Twist改为TwistStamped,第204行的False改为True.
以上更改之后,开启导航环境和far_planner后,开启键盘节点,
rosrun teleop_twist_keyboard teleop_twist_keyboard.py通过q加速,i前进,j,l左右转,即可进行小车遥控。
far_planner跑自己的rosbag
跑rosbag属于在真实的机器人上使用,所以需要使用真实机器人命令打开
roslaunch vehicle_simulator system_real_robot.launch在开启雷达话题并传输点云信息后,需要一个点云数据处理算法来衔接至far_planner.可以使用的几个算法如下:
1.LOAM:GitHub - cuitaixiang/LOAM_NOTED: loam code noted in Chinese(loam中文注解版)
注意:按原样使用‘src/loam_interface/launch/loam_interface.launch’包来桥接状态估计输出。
2.A-LOAM:GitHub - HKUST-Aerial-Robotics/A-LOAM: Advanced implementation of LOAM
注意:在“src/loam_interface/slaunch/loam_interface=launch”中,设置“stateEstimationTopic”=
/aft_mapped_to_init_high_frec”、“flipStateEstimation=false”和“flipRegisteredScan=false”。
注意:在“src/loam_interface/slaunch/loam_interface=launch”中,设置“registerdScanTopic”=
/registered_cloud’。
注意:在“src/loam_interface/slaunch/loam_interface=launch”中,设置“stateEstimationTopic”=
/lio_sam/mapping/odometric','registeredScanTopic=/lio_sam/mapping/cloud_registered',
“flipStateEstimation=false”和“flipRegisteredScan=false”。
5.LIO-mapping:GitHub - hyye/lio-mapping: Implementation of Tightly Coupled 3D Lidar Inertial Odometry and Mapping (LIO-mapping)
注意:在“src/loam_interface/slaunch/loam_interface=launch”中,设置“stateEstimationTopic”=
/lio_map_builder/aft_mapped_to_init','registeredScanTopic=
/lio_map_builder/cloud_registered'、'flipStateEstimation=false'和'flipRegisteredScan=
false。
6.FAST-LIO2:GitHub - hku-mars/FAST_LIO: A computationally efficient and robust LiDAR-inertial odometry (LIO) package
注意:在“src/loam_interface/slaunch/loam_interface=launch”中,设置“stateEstimationTopic”=
/Odometry”、“registerdScanTopic=/cloud_registered”、“flipStateEstimation=false”,以及
'flipRegisteredScan=false'。
注意:在“src/loam_interface/slaunch/loam_interface=launch”中,设置“stateEstimationTopic”=
/Odometry”、“registerdScanTopic=/cloud_registered”、“flipStateEstimation=false”,以及
'flipRegisteredScan=false'。
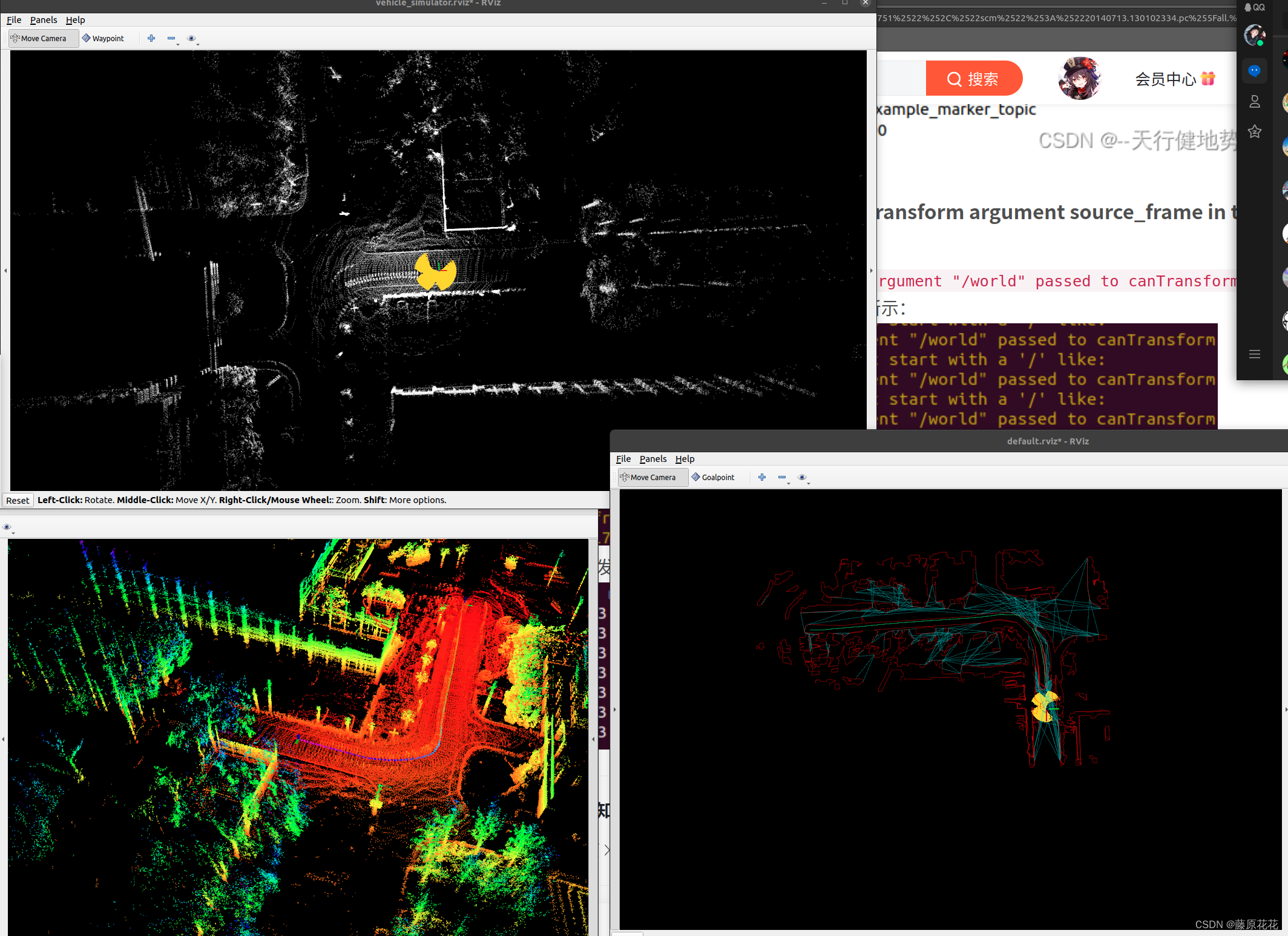
使用以上其中任何一个包时,都需要把‘use_sim_time’设置为‘true’才行,否则会出现
Invalid argument "/camera" passed to canTransform argument source_frame in tf2 frame_ids cannot start with a '/' like:主要问题是时间戳对不上导致tf树对不上。
然后就可以用‘--clock’播放rosbag包了。
rosbag play --clock filename.bag同时可以调整“src/local_planner/slaunch/local_planner.slaunch”中的“obstacleHeightThre”以定义
地形云厚度。
效果如下:
其他问题
1.开始跑far_planner时,/camera/image的相机图像总是打不开,urdf和xacro都没有错的情况下,我重新升级了一些gazebo的功能包,修复好了问题。
sudo apt-get install ros-noetic-rviz
sudo apt-get install ros-noetic-robot-state-publisher
sudo apt-get install ros-noetic-gazebo-ros-pkgs ros-noetic-gazebo-ros-control

















 1076
1076

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









