







Velodyne VLP16 激光雷达测试
说明
1、ubuntu16.04和ROS Kinetic系统环境下测试Velodyne VLP16 激光雷达的功能是否正常
2、已完结,目前不研究此设备
1、安装驱动
(1)sudo apt-get install ros-kinetic-velodyne
如果自己的ROS是indigo,输入下面命令
(2)sudo apt-get install ros-indigo-velodyne
我的ROS是kinetic,因为我刚接触ubuntu,不懂这些,用了(2)里面的命令,然后显示软件包无法定位。这一步浪费了我整整一个晚上时间,大家一定要看清自己的ROS版本。
2、连接到激光雷达
这一步是第二天早上来弄的,按照一篇博客上的方法,搞了一个上午都没用,所以我建议不要在命令里配置,自己手动添加有线网络(怎么手动设置百度一下就出来,这里不详细截图说),输入这个地址:
address 192.168.1.77
netmask 255.255.255.0
gateway 192.168.1.1
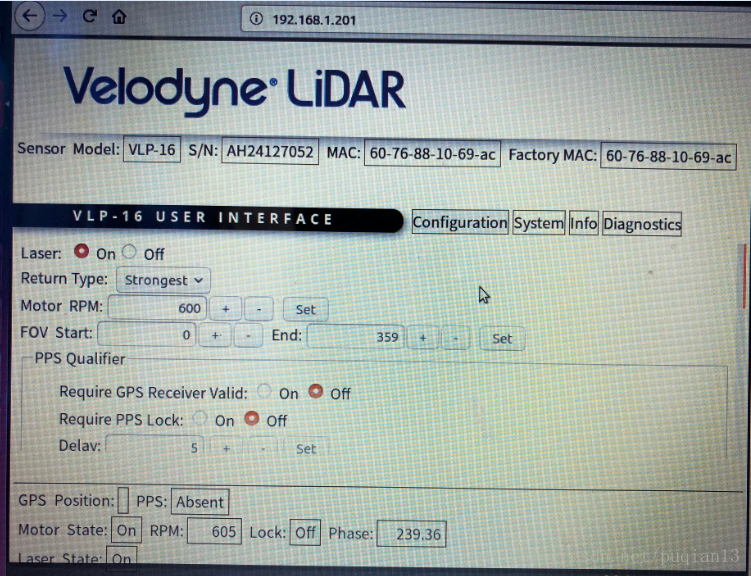
然后在网址上输入192.168.1.201可以看到激光雷达的配置文件,成功后页面是这样的
3、新建一个ROS工程
mkdir -p catkin_velodyne/srccd
catkin_velodyne/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
rosdep install --from-paths src --ignore-src --rosdistro indigo -y
catkin_make
source devel/setup.bash
4、把Velodyne XML文件转成ROS节点的YAML文件
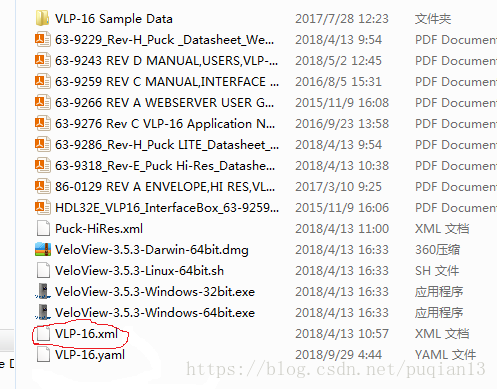
VLP-16.xml文件是激光雷达附赠U盘中提供的,转换后生成VLP-16.yaml,下图红框里的位置
可以把这个文件复制出来,也可以直接在优盘里,我是直接在优盘里使用,不过建议还是复制出来好。
在终端输入以下命令:
rosrun velodyne_pointcloud gen_calibration.py +/VLP-16.xml
"+"不要输进去,那里换成你自己VLP文件所在的路径名
5、加载
roslaunch velodyne_pointcloud VLP16_points.launch calibration:=+/VLP-16.yaml
此处“+”号也换成路径名
6、实时显示点云图
rosbag record -O out /velodyne_points
接着在rviz中点Add,增加PointCloud2,再在PointCloud2下点topic输入/velodyne_points。这样就可以实时显示获取的3D点云图

















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











