






import numpy as np
import cv2
from matplotlib import pyplot as plt
def cv_show(name,img):
cv2.imshow(name, img)
cv2.waitKey(0)
cv2.destroyAllWindows()
#imageA = cv2.imread("/home/lake/teacher.WG/first/104.bmp")
imageA = cv2.imread("/home/lake/图片/rabbit2.png")#左右图像位置相反放置
#imageA = cv2.imread("/home/lake/图片/104.bmp")#细胞图像匹配不足,无法拼接
imageA=cv2.resize(imageA,(141,180))
#imageA = cv2.resize(imageA,(0,0),fx=0.4,fy=0.4)
imageB = cv2.imread("/home/lake/图片/rabbit1.png")
#imageB = cv2.imread("/home/lake/图片/107.bmp")
#imageB = cv2.imread("/home/lake/teacher.WG/first/107.bmp")
imageB=cv2.resize(imageB,(141,180))
#imageB = cv2.resize(imageB,(0,0),fx=0.4,fy=0.4)
grayA = cv2.cvtColor(imageA, cv2.COLOR_BGR2GRAY)
grayB = cv2.cvtColor(imageB, cv2.COLOR_BGR2GRAY)
# 建立SURF生成器
descriptor = cv2.xfeatures2d.SURF_create()
# 检测SURF特征点,并计算描述子
kpsA, featuresA = descriptor.detectAndCompute(grayA, None)
print(np.array(kpsA).shape)
print(np.array(featuresA).shape)
kpsB, featuresB = descriptor.detectAndCompute(grayB, None)
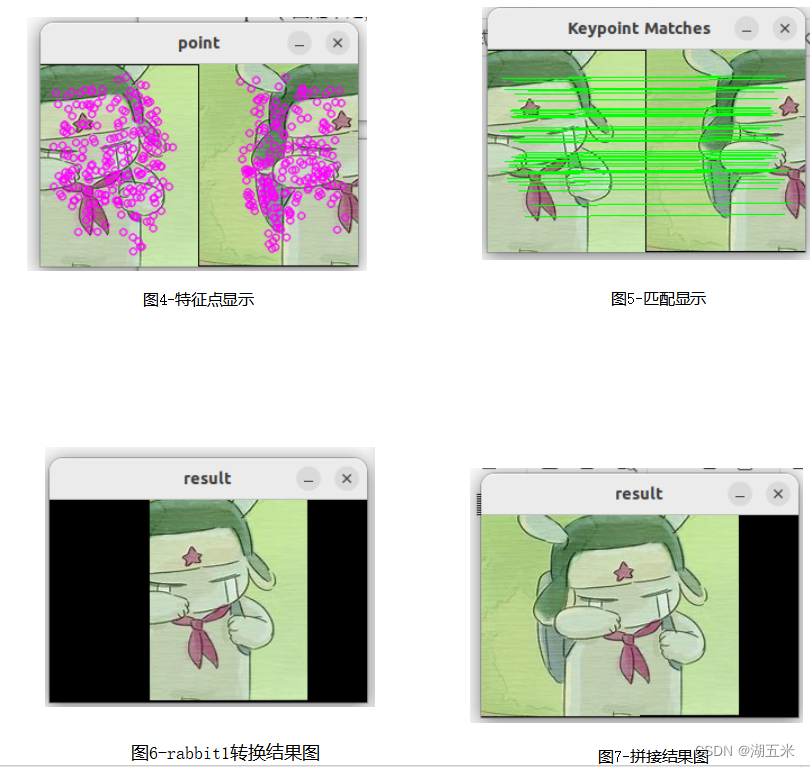
#画出特征点,并显示为红色圆圈
img3 = cv2.drawKeypoints(imageA,kpsA,imageA,color=(255,0,255))
img4 = cv2.drawKeypoints(imageB,kpsB,imageB,color=(255,0,255))
hmerge = np.hstack((img3, img4)) #水平拼接
cv2.imshow("point", hmerge) #拼接显示为gray
cv2.waitKey(0)
# 将结果转换成NumPy数组
kpsA = np.float32([kpA.pt for kpA in kpsA])
kpsB = np.float32([kpB.pt for kpB in kpsB])
print(kpsA.shape)
#重载图像使后续拼接的图像没有红圈显示
imageA = cv2.imread("/home/lake/图片/rabbit2.png")#左右图像位置相反放置
imageB = cv2.imread("/home/lake/图片/rabbit1.png")
#imageA = cv2.imread("/home/lake/图片/104.bmp")
#imageB = cv2.imread("/home/lake/图片/107.bmp")
# 建立匹配器
# FLANN 参数设计
FLANN_INDEX_KDTREE = 0
index_params = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5)
search_params = dict(checks=50)
flann = cv2.FlannBasedMatcher(index_params,search_params)
# 使用flann检测来自A、B图的SIFT特征匹配对,K=2
rawMatches = flann.knnMatch(featuresA, featuresB, k=2)
matchesMask = [[0,0] for i in range(len(rawMatches))]
print(np.array(rawMatches).shape)
matches = []
for m, n in rawMatches:
if m.distance < 0.75 * n.distance:
matches.append((m.trainIdx, m.queryIdx))
print(np.array(matches).shape)
if len(matches) > 4:
# 获取匹配对的点坐标
ptsA = np.float32([kpsA[i] for (_, i) in matches])
print(ptsA.shape)
ptsB = np.float32([kpsB[i] for (i, _) in matches])
# 计算视角变换矩阵
H, status = cv2.findHomography(ptsA, ptsB, cv2.RANSAC, 4.0)
print(H.shape)
print(status.shape)
# 将图片A进行视角变换,result是变换后图片
hA, wA = imageA.shape[:2]
print((hA, wA))
hB, wB = imageB.shape[:2]
print((hB, wB))
result = cv2.warpPerspective(imageA, H, (wA+wB, hA))
# 可视化
vis = np.zeros((hA, wA+wB, 3), dtype=np.uint8)
vis[0:hA, 0:wA] = imageA
vis[0:hB, wA:] = imageB
# 联合遍历,画出匹配对
for ((trainIdx, queryIdx), s) in zip(matches, status):
# 当点对匹配成功时,画到可视化图上
if s == 1:
# 画出匹配对
ptA = (int(kpsA[queryIdx][0]), int(kpsA[queryIdx][1]))
ptB = (int(kpsB[trainIdx][0]) + wA, int(kpsB[trainIdx][1]))
cv2.line(vis, ptA, ptB, (0, 255, 0), 1)
cv_show("Keypoint Matches", vis)
cv2.waitKey(0)
cv_show('result', result)
cv2.waitKey(0)
# 将图片B传入result图片最左端
result[:hB, :wB] = imageB
cv_show('result', result)
#调整拼接后图像显示,宽度为两张拼接之前图像总和
result=cv2.resize(imageB,(1000,418))
else:
print("匹配不足,无法拼接")
结果:
参考:
Opencv之全景拼接
应用OpenCV和Python进行SIFT算法的实现
详解SIFT、SURF和ORB特征点检测和描述算法















 6983
6983











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









