







前言
学会使用RTT提供的软件包对MPU6050六轴陀螺仪传感器的数据读取
一、新建工程,选择所使用的芯片,串口以及调试器,你用的是啥就选啥

二、在原理图上找到陀螺仪的IIC接口(一般都是使用IIC)
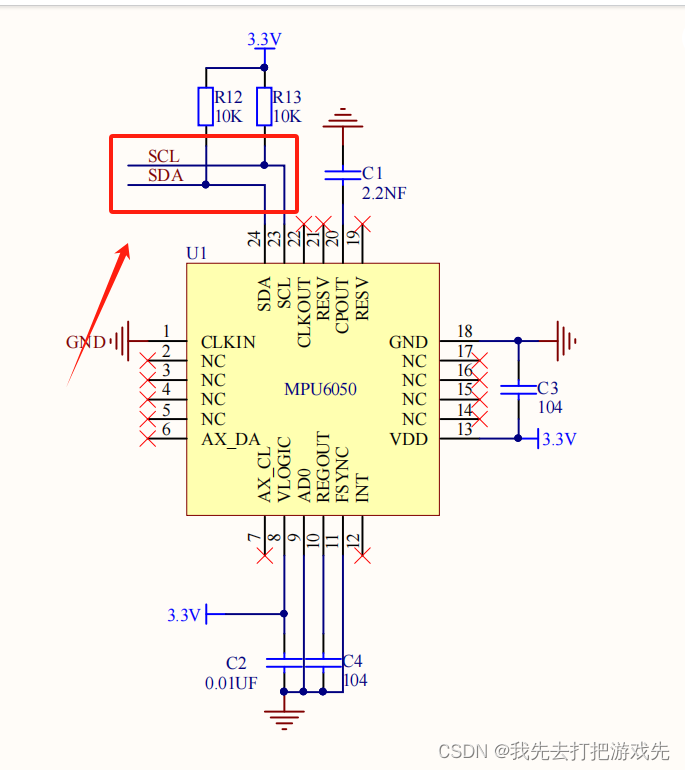
三、在主控芯片上找到对应接口,确定IIC所使用的引脚,我这里是PB6:SCL,PB7:SDA
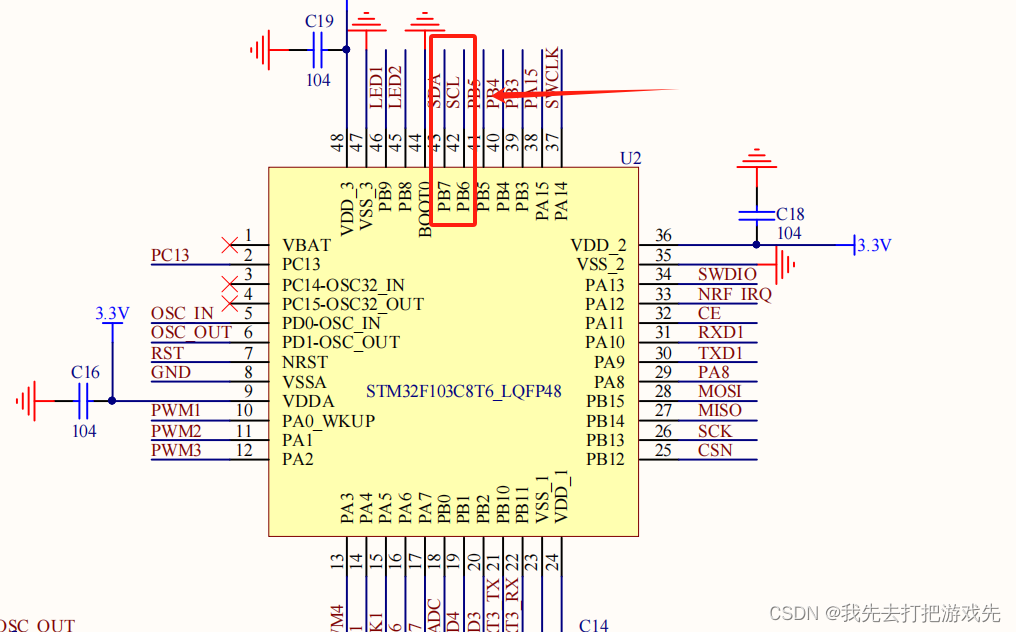
四、查一下该芯片的引脚定义,得知,我们使用的是I2C1

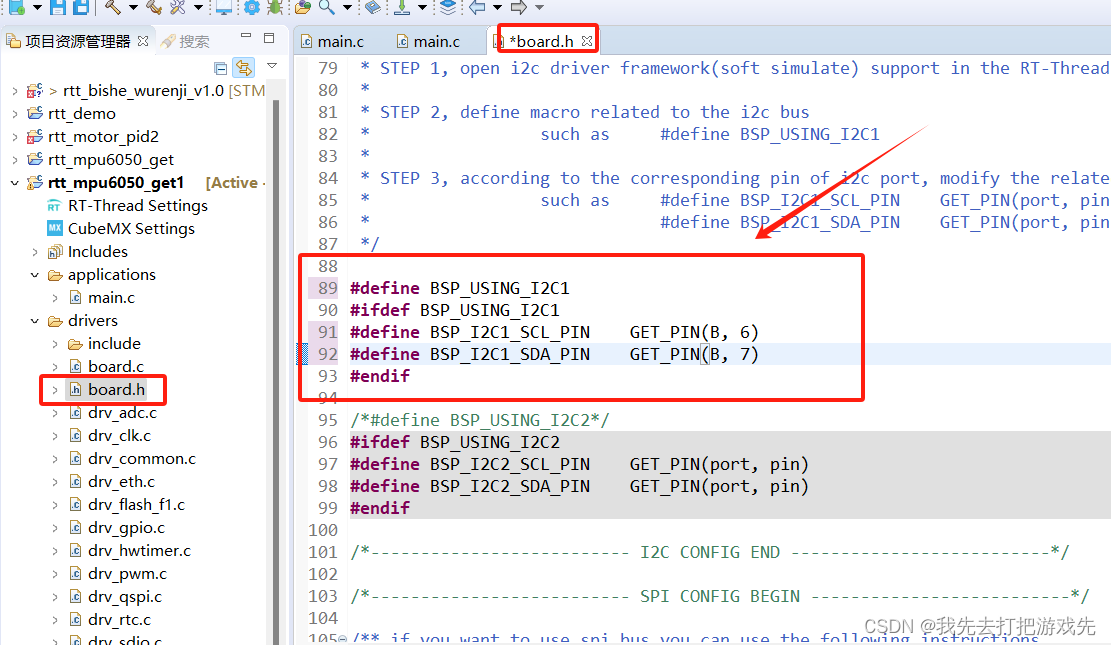
五、在board.h中打开I2C1的宏,并进行引脚绑定
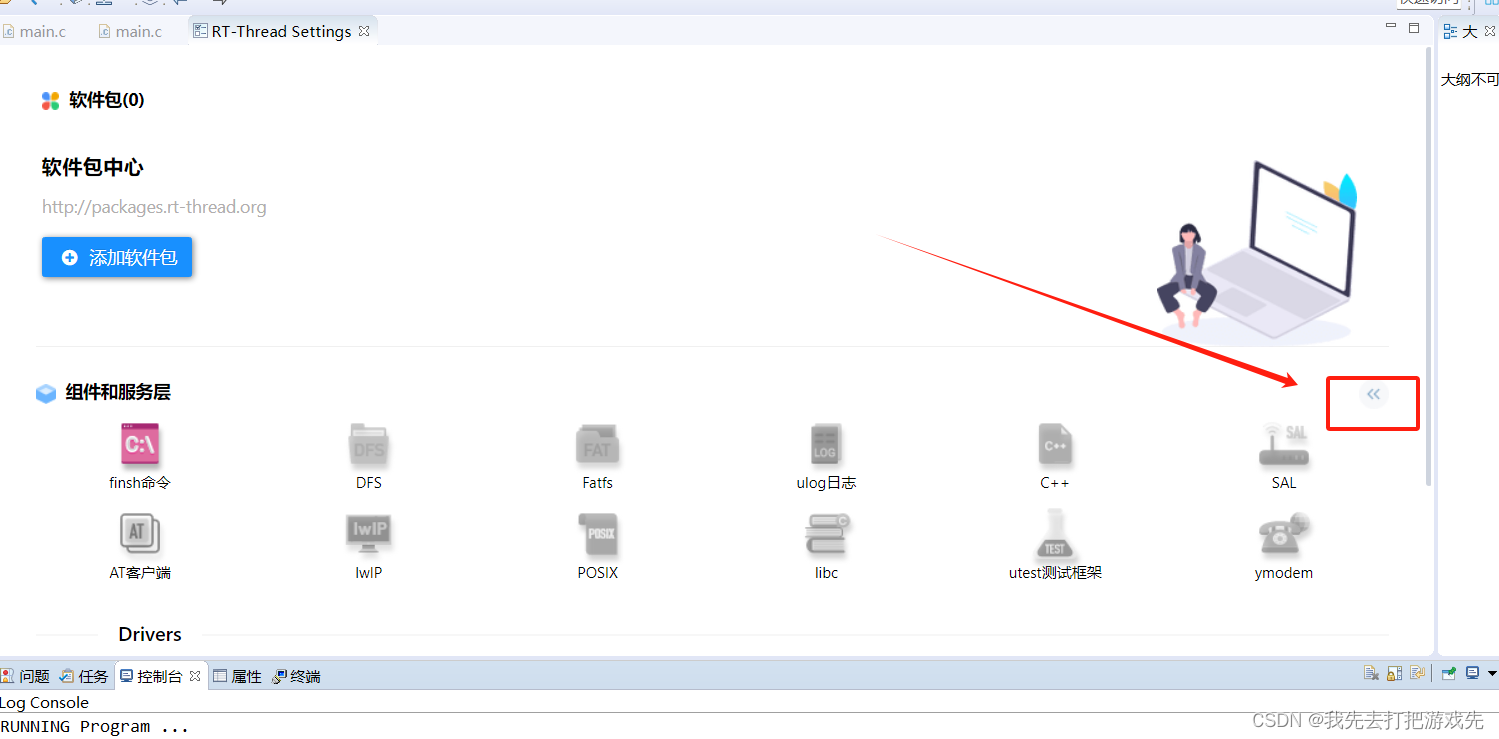
六、双击RT-Thread Settings
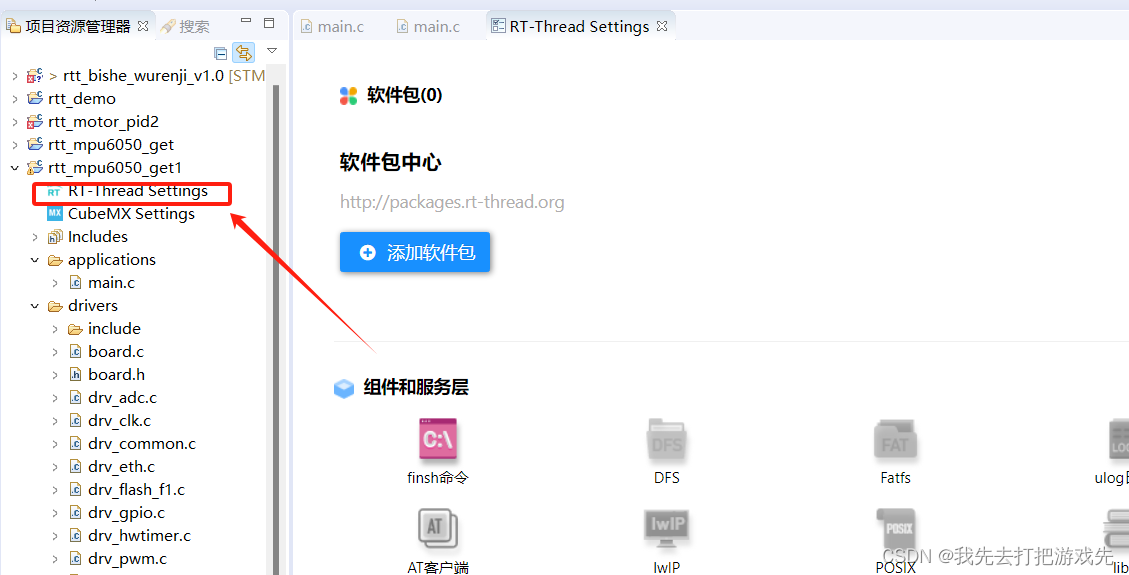
七、点击右侧箭头
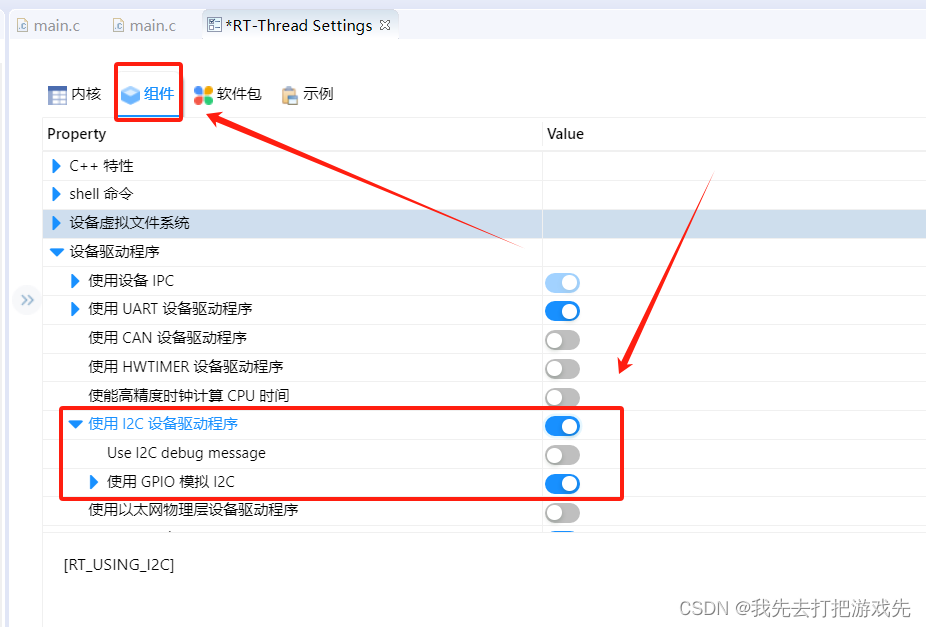
八、打开I2C设备驱动程序
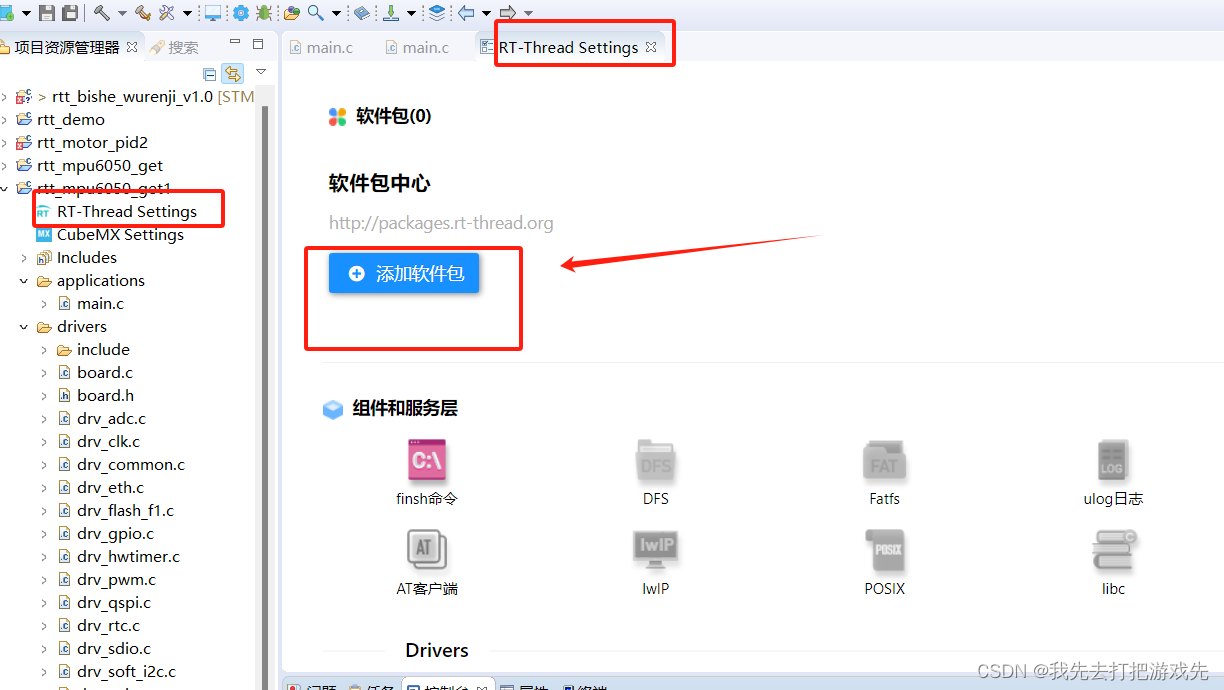
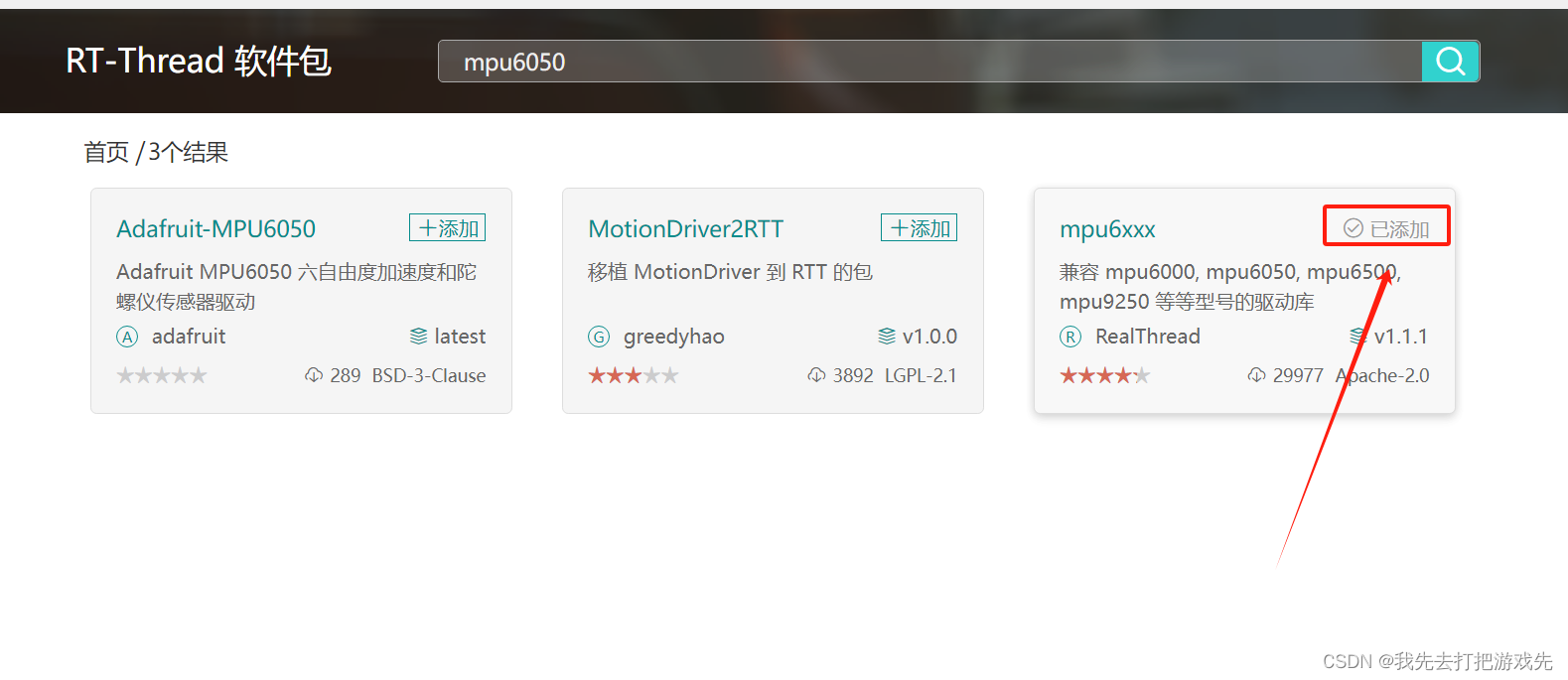
九、点击添加软件包
十、搜索MPU6050

十一、找到这个包
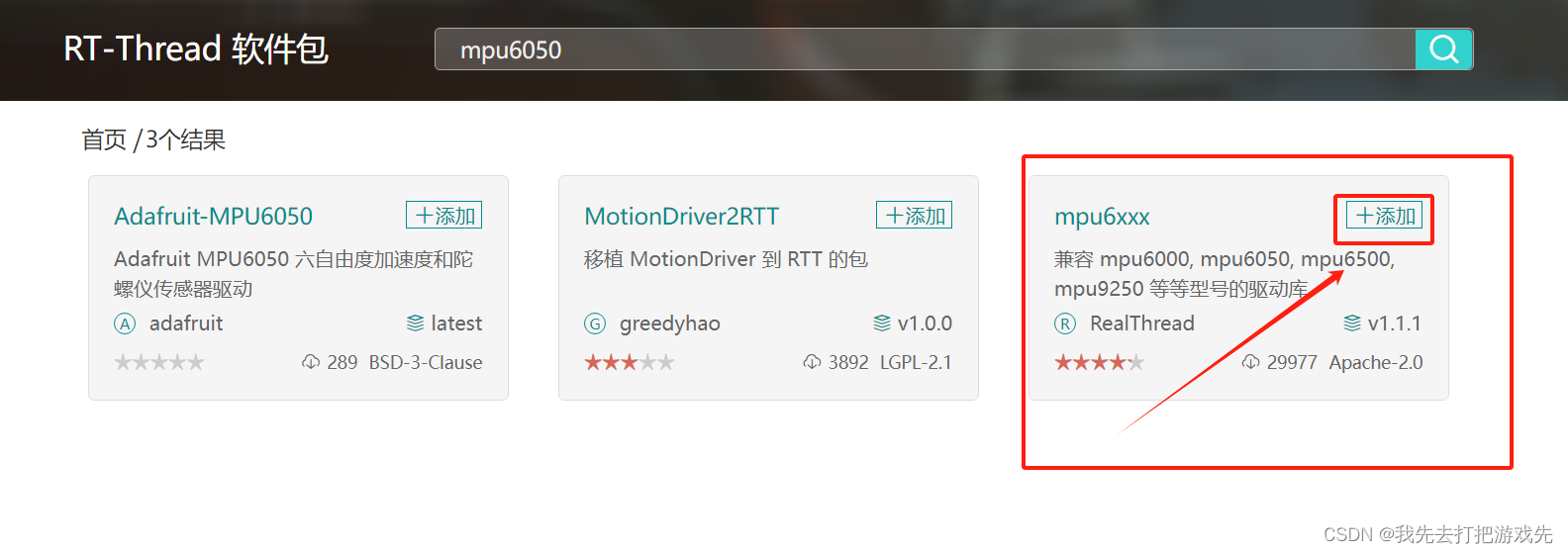
十二、点击添加即可
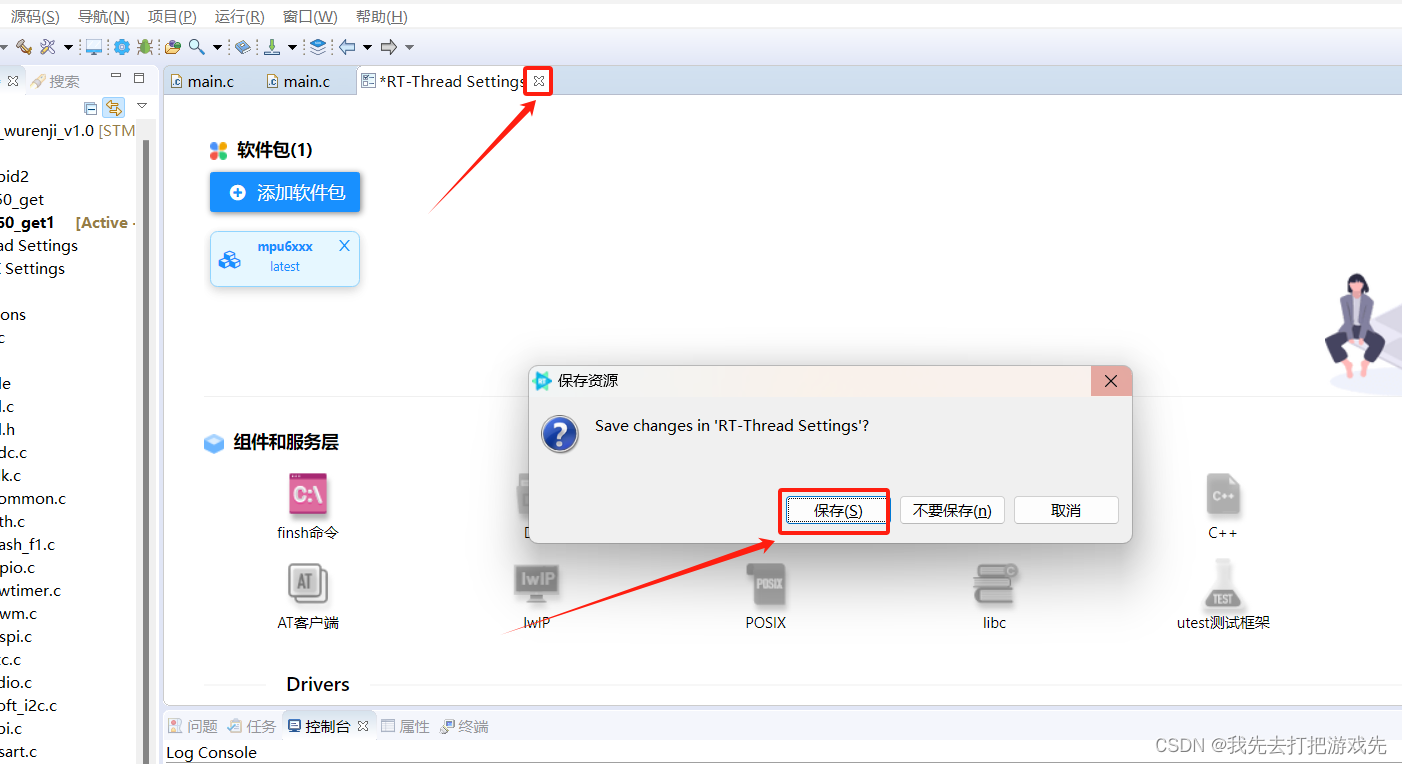
十三、记得保存
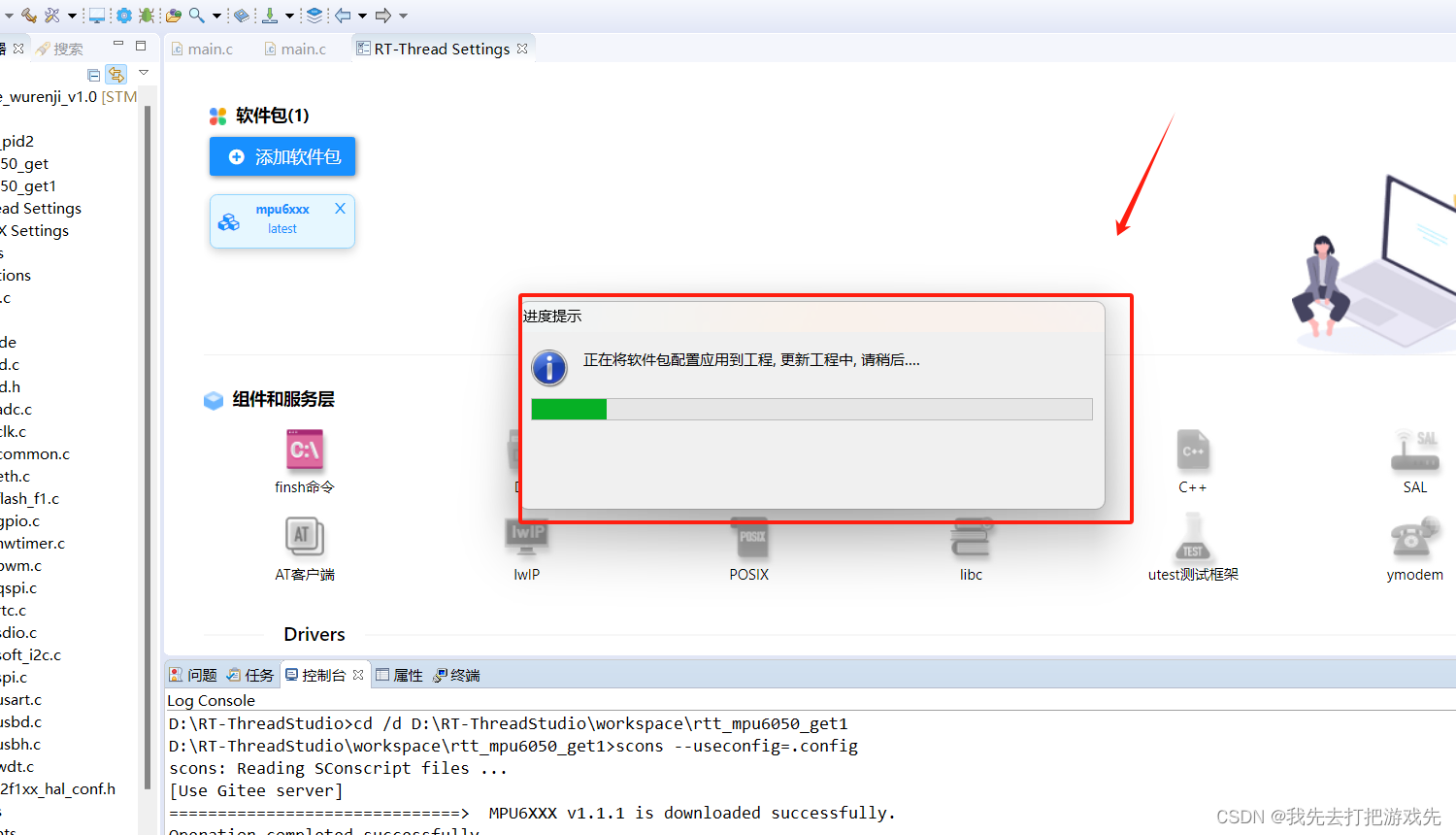
十四、保存后就会把软件包配置到你的工程中了
十五、在主函数中写入如下代码,注释我也写了,包的使用就这么简单,初始化后就可以读数据了
/*
* Copyright (c) 2006-2023, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2023-12-16 RT-Thread first version
*/
#include <rtthread.h>
#include <rtdevice.h>
#include <board.h>
//-------------软件包-------------------
#include "mpu6xxx.h"
#define MPU6050_I2C_BUS_NAME "i2c1" /* 传感器连接的I2C总线设备名称 */
int main(void)
{
struct mpu6xxx_device *dev; // 定义mpu6xxx设备结构体指针
struct mpu6xxx_3axes accel, gyro; // 定义存储加速度和陀螺仪数据的结构体变量
// 初始化mpu6xxx设备,MPU6050_I2C_BUS_NAME是I2C总线名称,RT_NULL表示自动探测I2C设备
dev = mpu6xxx_init(MPU6050_I2C_BUS_NAME, RT_NULL);
if (dev == RT_NULL)
{
rt_kprintf("mpu6xxx init failed\n");
return -1;
}
rt_kprintf("mpu6xxx init succeed\n");
while(1)
{
// 从mpu6xxx设备读取加速度数据并存储在accel结构体中
mpu6xxx_get_accel(dev, &accel);
// 从mpu6xxx设备读取陀螺仪数据并存储在gyro结构体中
mpu6xxx_get_gyro(dev, &gyro);
// 打印加速度数据
rt_kprintf("accel.x = %3d, accel.y = %3d, accel.z = %3d ", accel.x, accel.y, accel.z);
// 打印陀螺仪数据
rt_kprintf("gyro.x = %3d gyro.y = %3d, gyro.z = %3d\n", gyro.x, gyro.y, gyro.z);
// 延时300毫秒
rt_thread_mdelay(300);
}
return RT_EOK;
}
十六、编译一下发现有如下报错,链接错误通常是由于ROM大小不够导致的,当然如果你没有报错,可以跳过这步
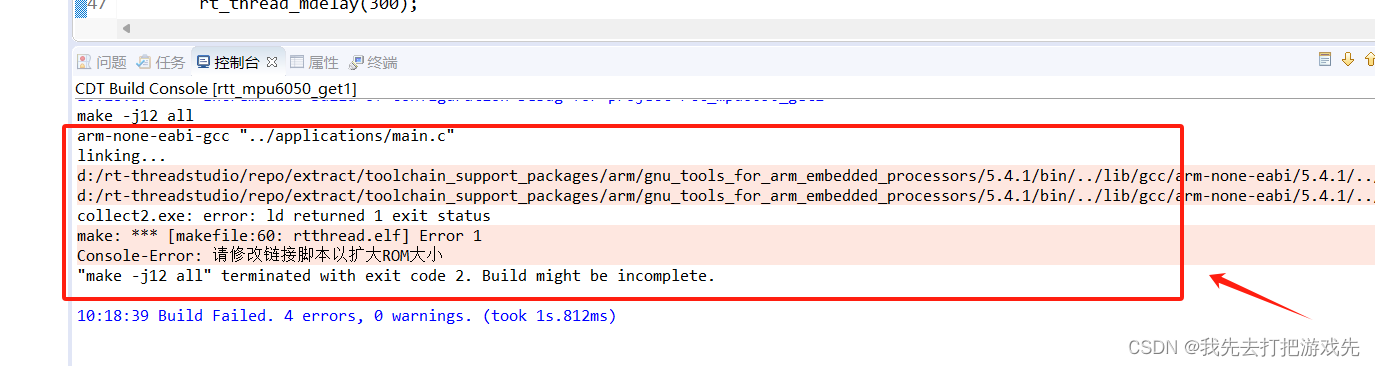
十七、接下来我们来解决报错,双击link.lds,打开链接脚本编辑器
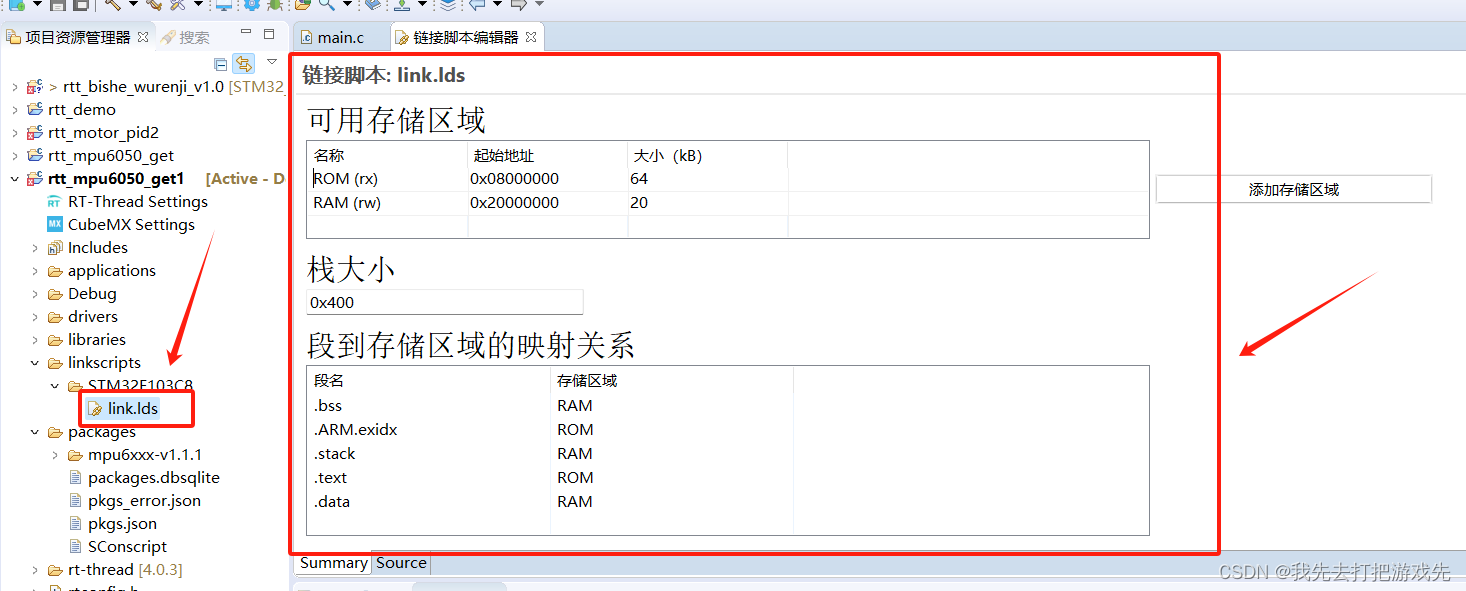
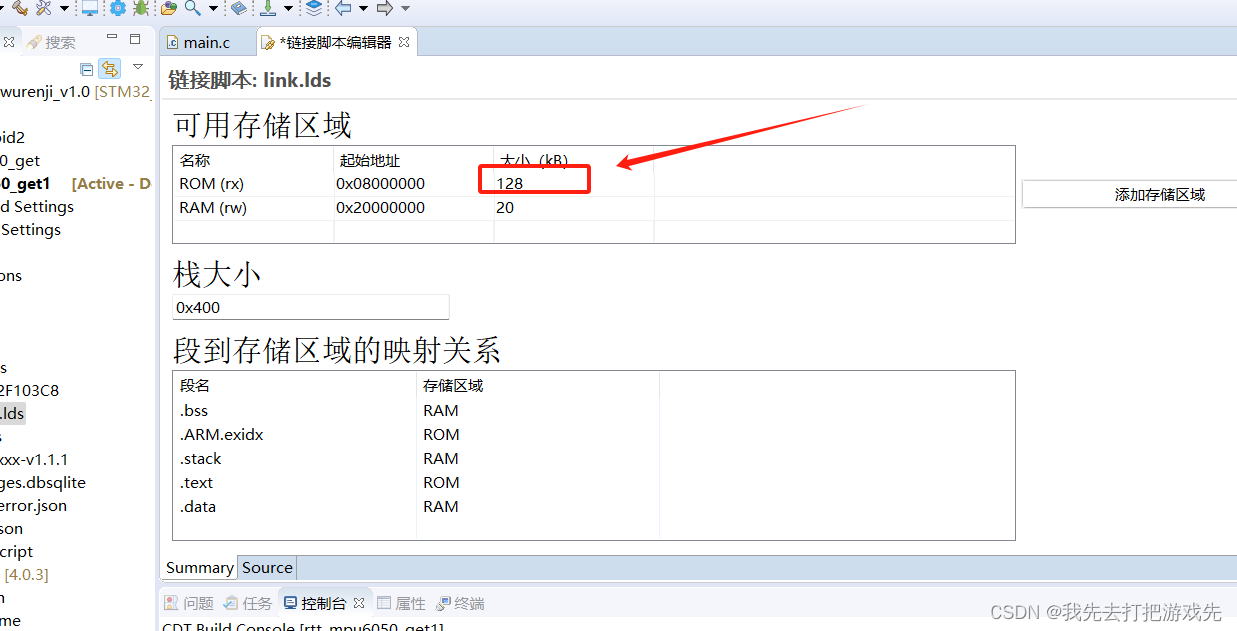
十八、修改ROM的大小,原来是64,现在改为128
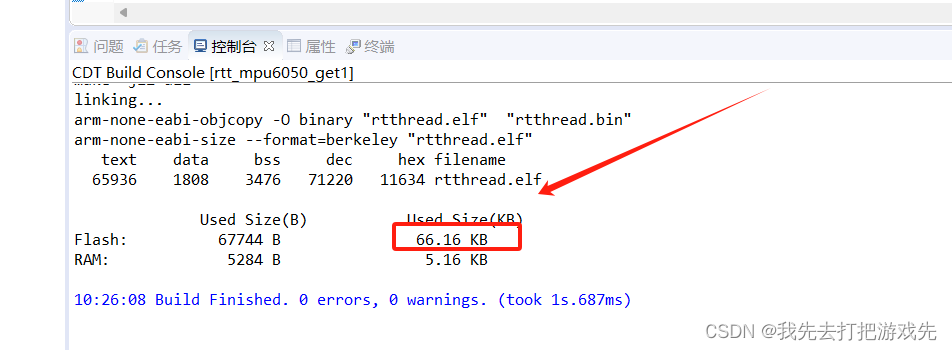
十九、再编译,报错解决,可以看到ROM占了66K,所以原来的64K是不够的,所以会报错
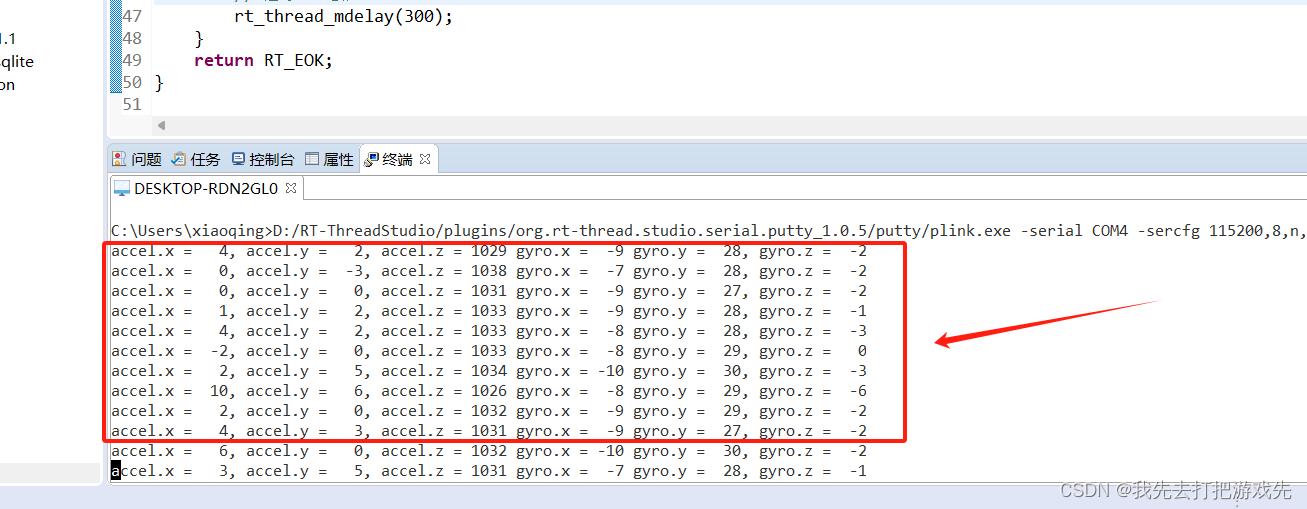
二十、下载代码后,连接好串口,打开终端查看数据,注意串口端口要选对,不然查看不到数据
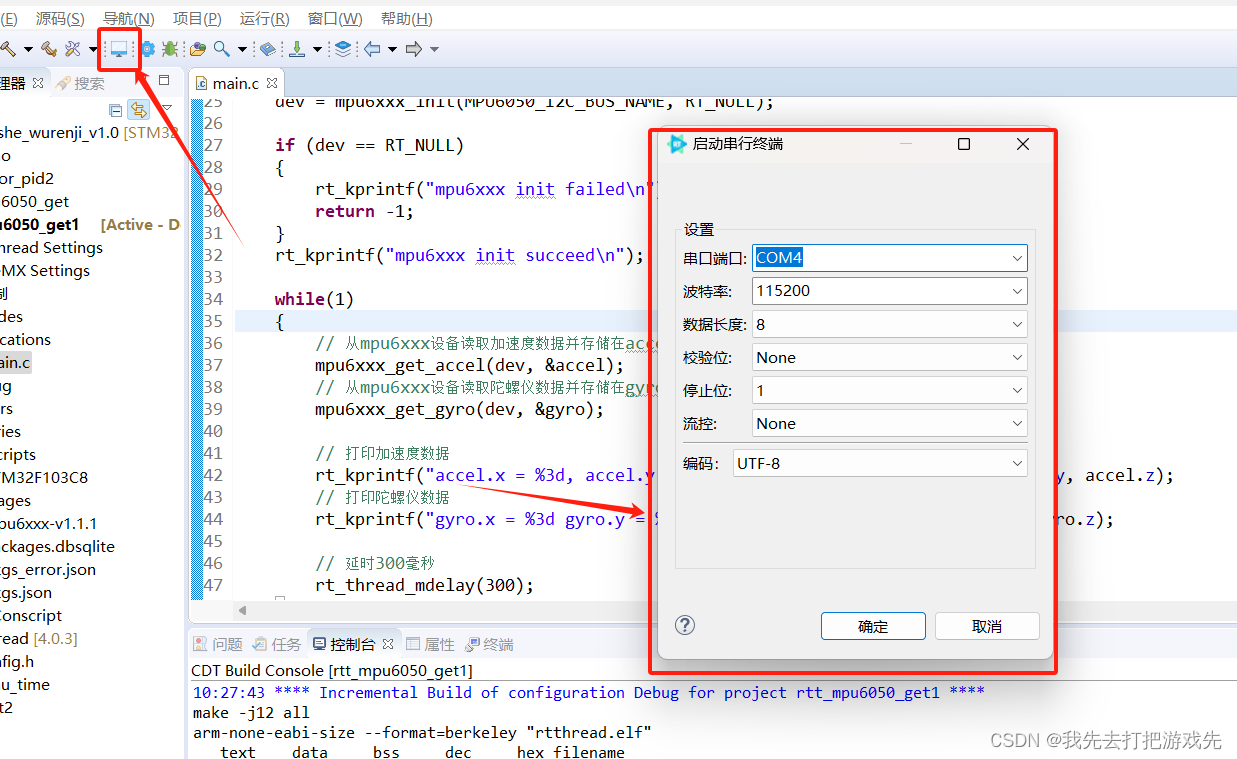
二十一、数据正常,后续进行滤波就可以使用啦















 4871
4871











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











