







坐标系和位姿变换
坐标系
在三维空间中,三根不共面的轴,坐标系能用他的基来表示。
机器人中各种坐标系:
- 世界系、惯性系
- 机体系
- 传感器参考系
点、向量、坐标系
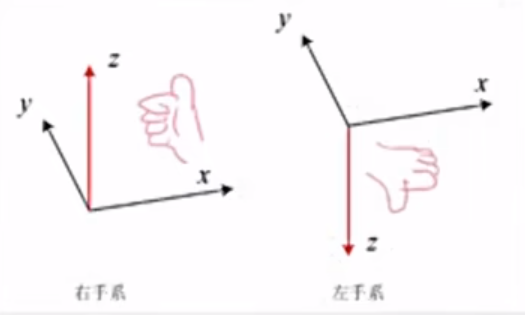
坐标系分为左左手系和右手系
下面讨论有关向量的运算:
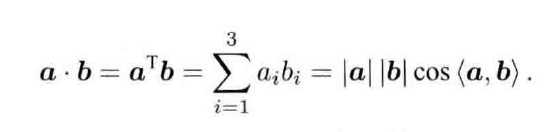
内积(对应坐标相乘在相加)
外积:(叉乘)
 向量叉乘表示不方便,可以写成矩阵与向量相乘的形式,
向量叉乘表示不方便,可以写成矩阵与向量相乘的形式,
外积的结果是一个向量,方向垂直于这两个向量,大小为
位姿变换
- 旋转变换

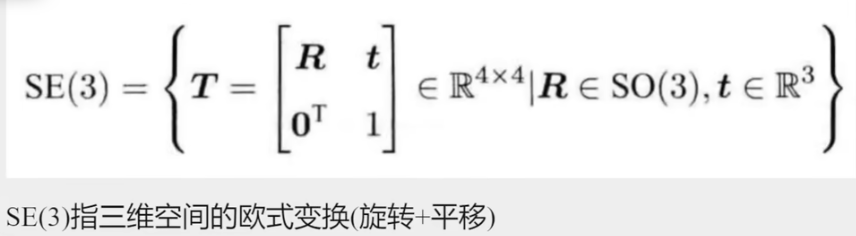
- 欧式变换

在旋转变换(SO3变换)的基础上,增加平移操作,就是SE(3)变换

R12:把姿态由2系对齐到1系的旋转矩阵
t12:把位置由2系对齐到1系的平移量
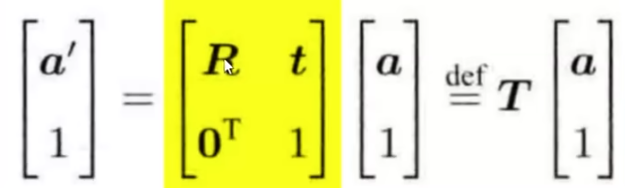
在多层坐标系的变换时,嵌套过多
为了方便嵌套,可以写成
描述刚体运动(姿态)
旋转矩阵:SO(3)
旋转向量/角轴:
总可以找到一个旋转前后没有变换的轴
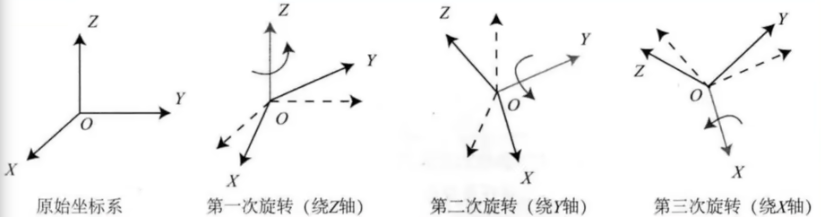
欧拉角:
无论是旋转矩阵还是旋转向量,对我们来说都非常不直观。而欧拉角则很好的解决了这一问题,他提供了一种非常直观的方式来描述旋转,他使用了3个分离的转角,把一个旋转分解成3次不同轴的旋转。
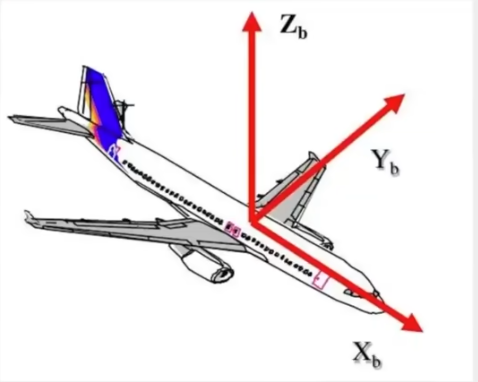
以飞机为例:
但是欧拉角存在旋转次序的问题:
最常用的是是XYZ或ZYX,选择的旋转顺序不同,欧拉角对同一旋转的描述也不同,要定义欧拉角,要先说明旋转轴顺序。
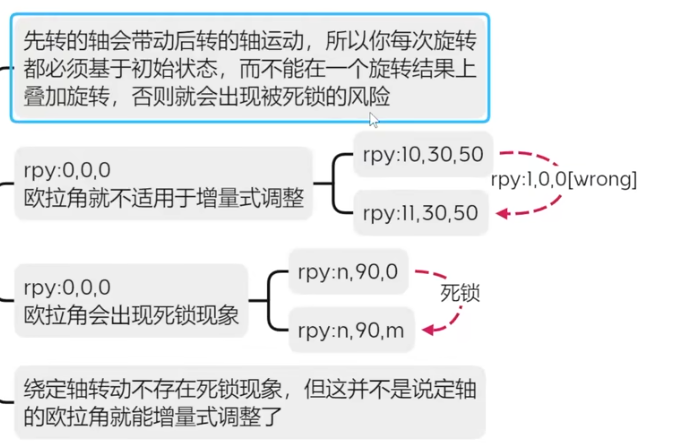
动轴和定轴的问题:
- 绕旋转之后的轴旋转(动轴)
- 绕着旋转前的轴旋转(定轴)
奇异性(不连续性) - 旋转向量,存在0-2pi的跳变,突然从2pi到0
- 欧拉角,存在跳变和万向锁
四元数
由来:
2D空间中的旋转可以用一个单位复数来表示。


3D空间的旋转也可以用复数表示,只不过虚部有三个维度组成,i,j,k类似于四元数的旋转操作。


运算:
加减:

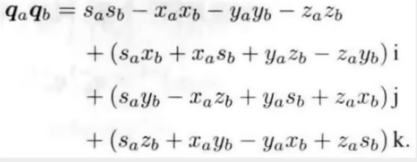
乘法:(四元数没有交换律)

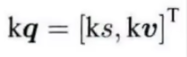
数乘:
取模:

共轭:

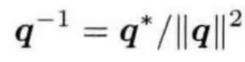
求逆:
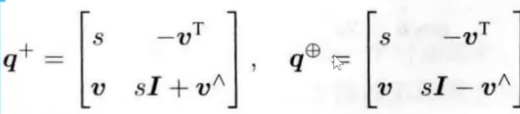
四元数乘法写成矩阵相乘:

作用:
把三维点拓展到四维
实践
Eigen使用
















 2857
2857











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











