 STM32 PWM频率与占空比测量
STM32 PWM频率与占空比测量








 本文介绍如何使用STM32的定时器在PWM输入模式下测量PWM信号的频率和占空比。通过配置定时器2和定时器3的通道1及2,并利用STM32CubeMX进行配置,可以实现对PWM信号的有效分析。
本文介绍如何使用STM32的定时器在PWM输入模式下测量PWM信号的频率和占空比。通过配置定时器2和定时器3的通道1及2,并利用STM32CubeMX进行配置,可以实现对PWM信号的有效分析。
前言
一、测量PWM频率和占空比原理
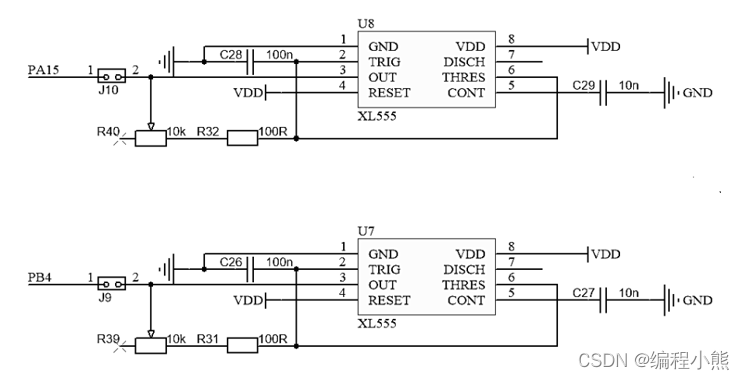
STM32G4上有两个信号发生器,接入引脚PA15和PB4用于生成PWM波
使用的是定时器2的通道1和定时器3的通道1

测量占空比和频率使用 PWM 输入模式,该模式是输入捕获的特例,使用通道 1 和通道 2。== PWM 输入模式需要占用两个捕获寄存器==
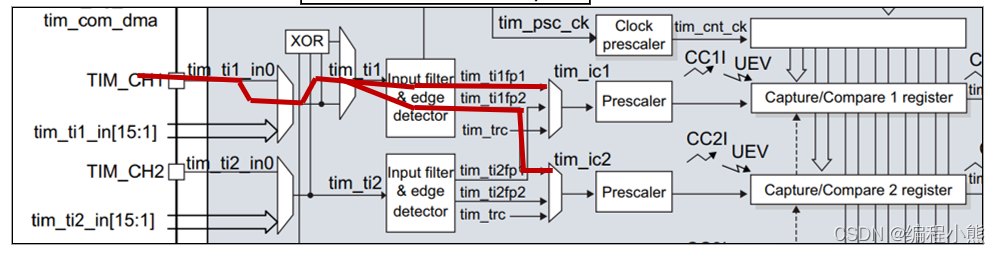
当使用 PWM 输入模式的时候,因为一个输入通道(TIx)会占用两个捕获通道(ICx),所以一个定时器在使用 PWM 输入的时候最多只能使用两个输入通道(TIx),PWM 信号由输入通道 TI1 进入,因为是 PWM 输入模式的缘故,信号会被分为两路,一路是 TI1FP1,另外一路是 TI2FP2,一路是周期,另一路是占空比
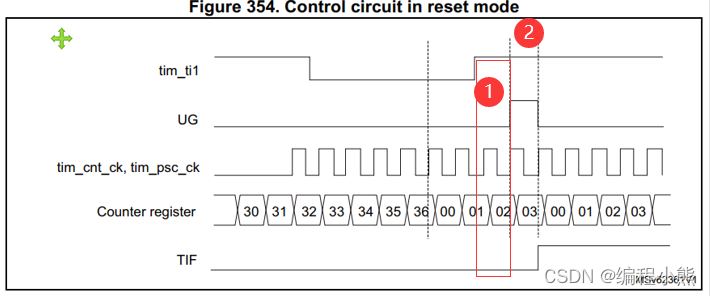
定时器从模式选择复位Reset模式: 使用内部时钟作为时钟源,TI1/2外部有效信号复位计数器。CH1触发输入上升沿有效时,先将计算器的值,移动到CCR比较寄存器中,然后计数器复位到默认值0(注意事件发生的顺序)
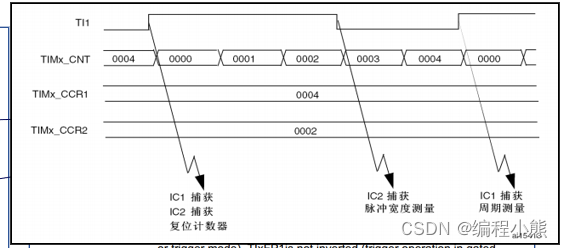
所以,当PWM信号由TI1进入**,配置TI1FP1为触发信号,上升沿捕获**,当上升沿的时候IC1,先将计算器的值移动到CCR中,然后计数器CNT清零,到了下降沿的时候,IC2捕获,此时计数器CNT的值被锁存到捕获寄存器CCR2中;到了下一个上升沿的时候,IC1捕获,计数器CNT的值被锁存到捕获寄存器CCR1中,然后又恢复到0, 其中CCR2测量的是脉宽,CCR1测量的是周期所以,占空比 = CCR2 / CCR1
详细原理:输入捕获原理
所以,通道1设置为上升沿捕获,通道2设置为下降沿捕获
(其实通道2也可以设置为上升沿捕获,见参考文章)
1Mhz计数cnt到65535需要的时间为0.065536s,因为两个上升沿之间的时间间隔最大为0.0014s(fmax=22.4khz),在这个时间段内,Cnt不能溢出,所以,直接记录捕获比较寄存器的数值即可计算频率,无需考虑溢出问题,也不用自动重装载
二、STM32CubeMX配置
(1)配置定时器2 / 3的模式,时钟来源,触发源,使能通道1/2
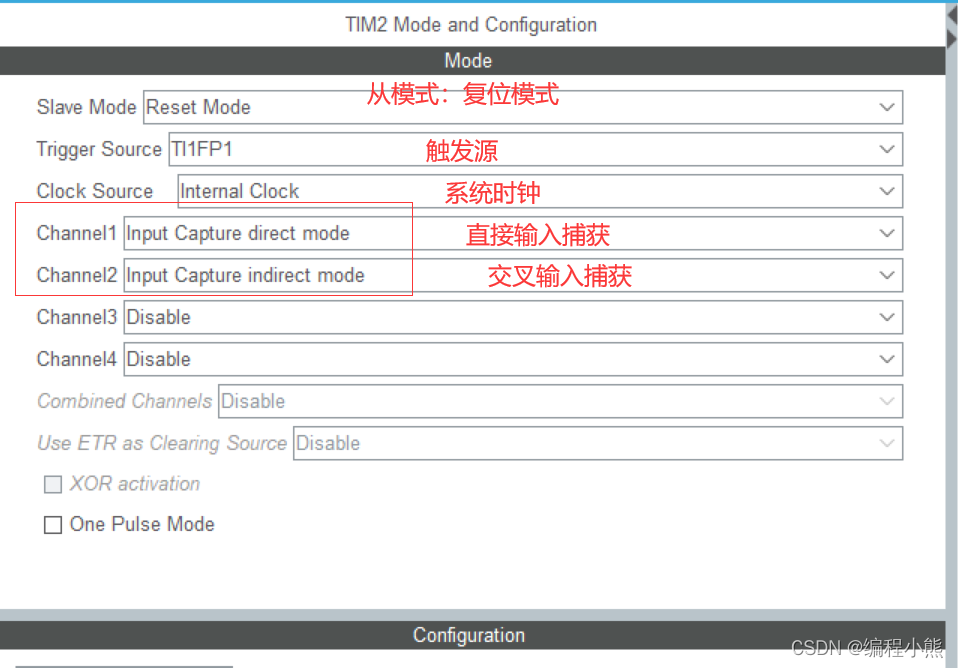
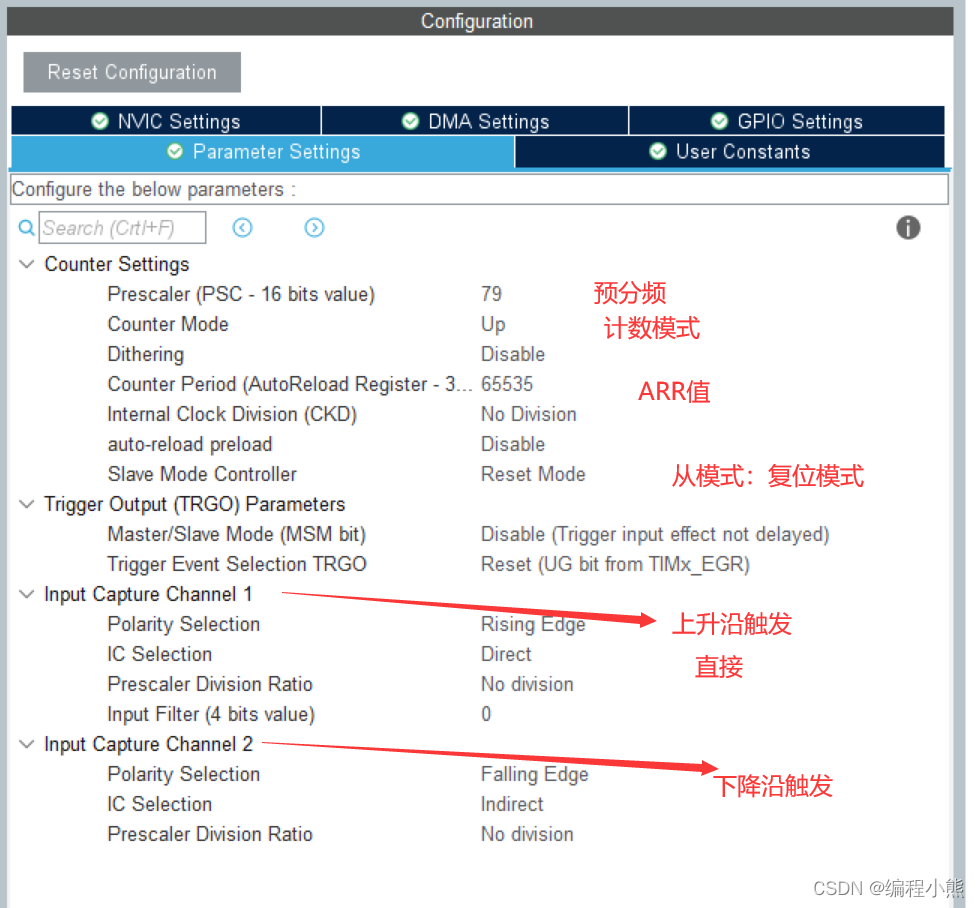
(2)配置计数器,通道1/2的基本参数
(3)定时器引脚配置

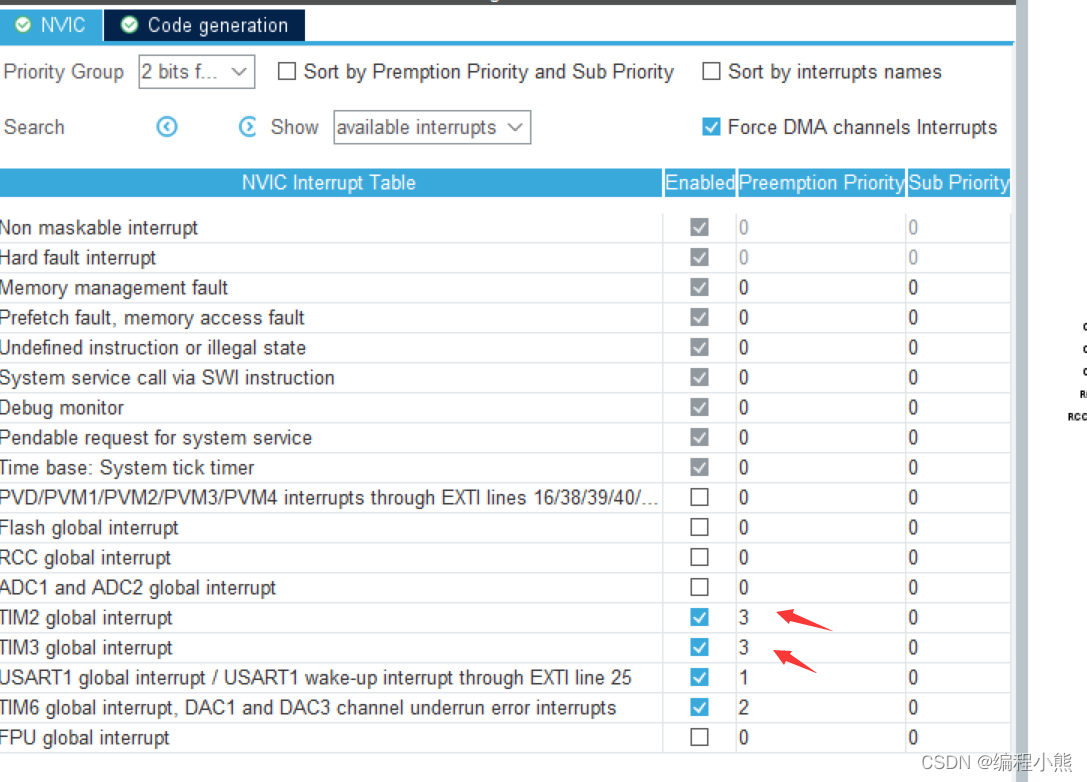
(4)定时器中断优先级配置
三、部分源码
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM3) // 定时器判断
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1) // 通道1
{
PWM1_T_Count = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1)+1; // f = 1e6/PWM1_T_Count
PWM1_Duty = (float)PWM1_D_Count / PWM1_T_Count; // 占空比
}
else if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2) // 通道2
{
PWM1_D_Count = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_2)+1;
}
}
if(htim->Instance == TIM2)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
PWM2_T_Count = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1)+1;
PWM2_Duty = (float)PWM2_D_Count / PWM1_T_Count ; // 占空比
}
else if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2) // 通道2
{
PWM2_D_Count = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_2)+1;
}
}
}
测得结果:
PWM1 output = 710hz-22.4khz PB4
PWM2 output = 630hz-22.0khz PA15
Tmax = 0.001410437235543s 最长周期
总结
提示:这里对文章进行总结:


















 1867
1867

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











