






c#中如何通过引用的方式调用c++编写的dll文件(c#可以直接引用c#库类文件),思路如下:
1.先用c++生成动态链接库的dll文件
2.通过c#库类项目将1生成的dll文件通过DllImport("PCLdll.dll")的方式将其封装
3.将1,2生成的dll文件放入c#项目的bin目录下,直接引用2中dll文件,即可通过实例化对象的方式调用1中封装的所有函数
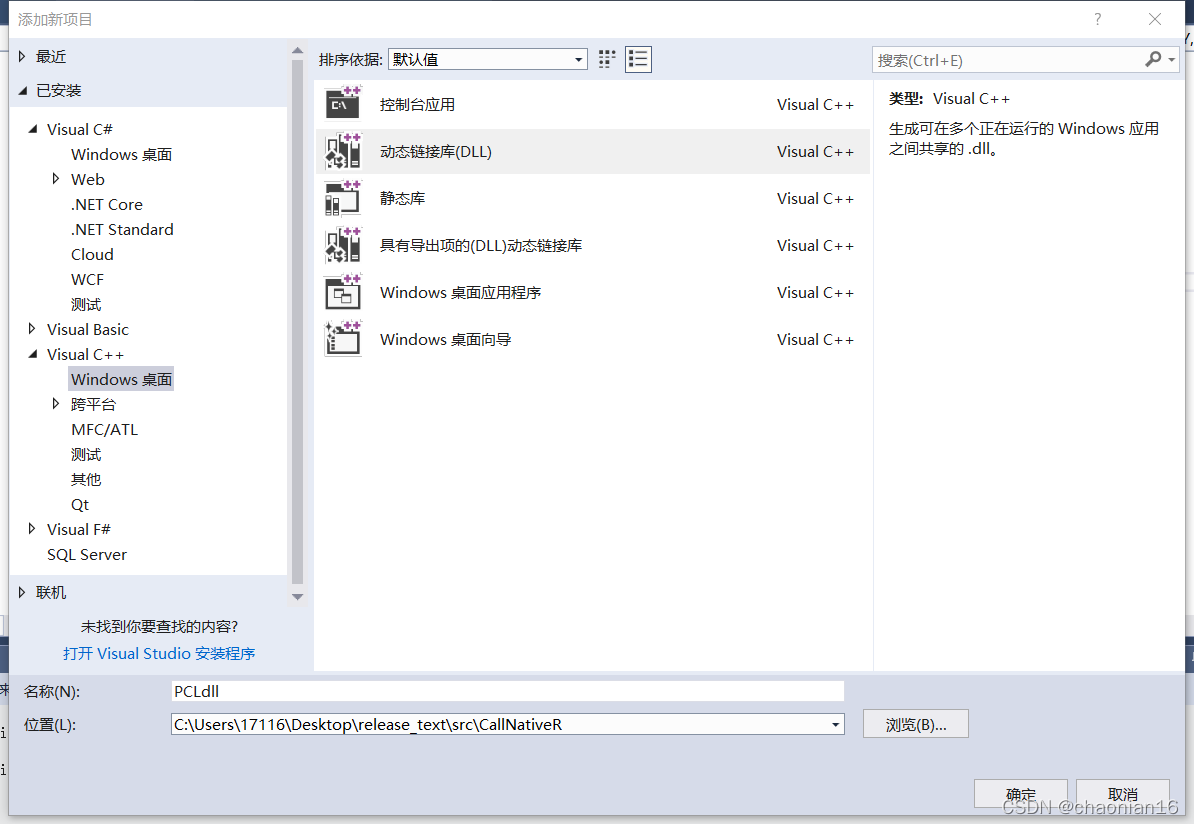
一:创建PCL动态链接库项目
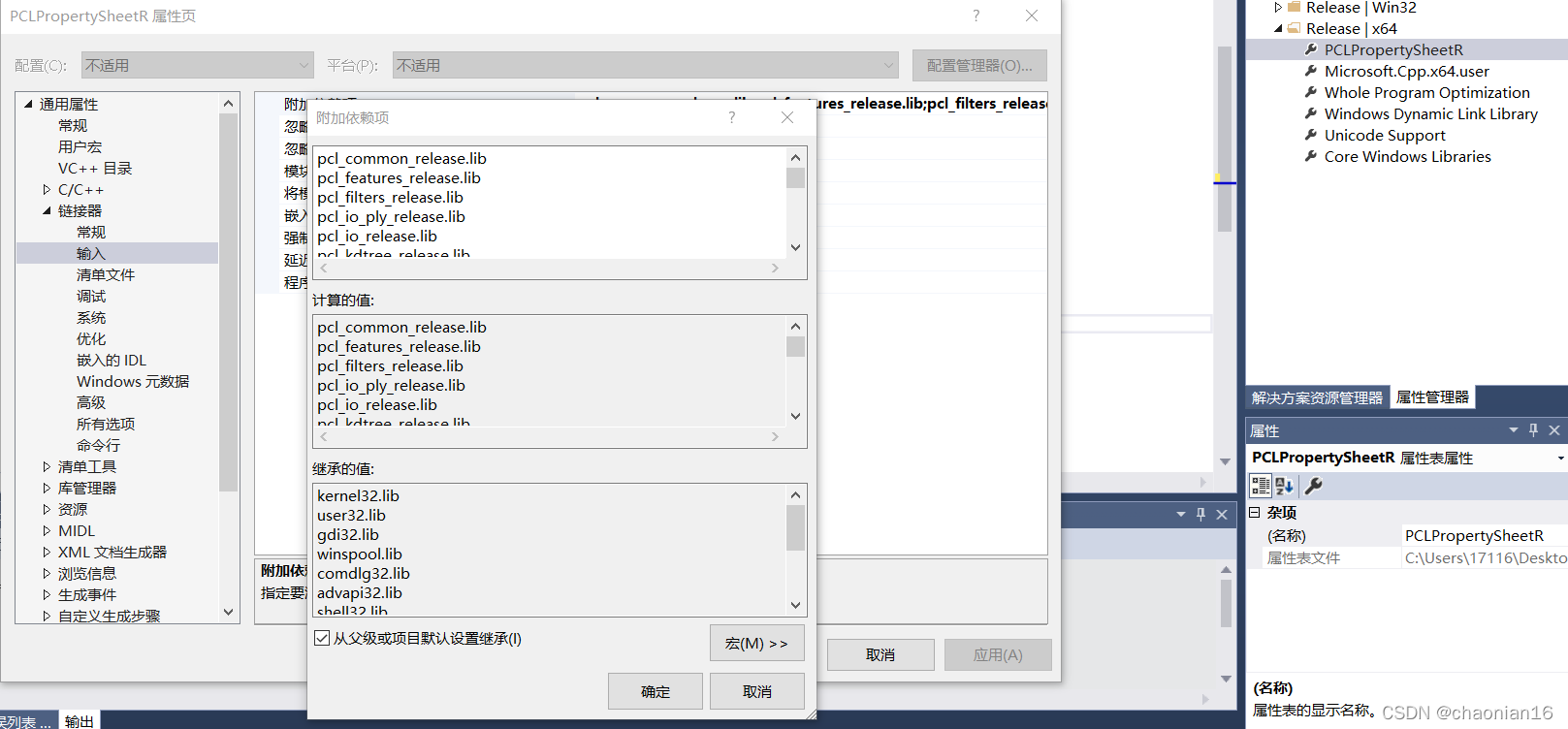
二、将预编译头(.h)文件删除,新建头文件PNative.h文件,并配置好PCL库环境
在头文件(PNative.h)中输入如下代码:
#pragma once
#include <iostream>
#include <string>
#include <sstream>
#include <stdio.h>
//extern "C" _declspec(dllexport) int Sum(int a, int b);
extern "C" _declspec(dllexport) int Size(char* msg);
extern "C" _declspec(dllexport) int Cloud_Visual(char* msg);
extern "C" _declspec(dllexport) int loadPCDFile(char* str, double*arr_X, double* arr_Y, double* arr_Z);
extern "C" _declspec(dllexport) int PassThoughPCDFile(char* str, float*arr_X, float* arr_Y, float* arr_Z);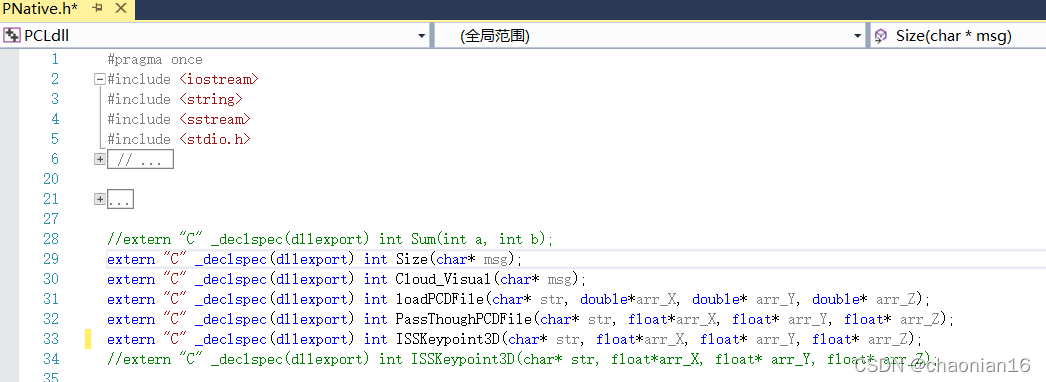
三、编写源文件,生成源文件PNative.cpp,将如下代码写入
#include "PNative.h"
#include <iostream>
#include<cmath>
#include<pcl/io/pcd_io.h>
#include<pcl/point_types.h>
#include<time.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/keypoints/iss_3d.h>
#include <pcl/io/ply_io.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/ModelCoefficients.h>
#include <pcl/features/normal_3d.h>
#include <pcl/sample_consensus/method_types.h> //随机参数估计方法头文件
#include <pcl/sample_consensus/model_types.h> //模型定义头文件
#include "resolution.h"
using namespace std;
//创建了一个名为cloud的指针,储存XYZ类型的点云数据
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
int Size(char* msg)
{
printf("%s", msg);
if (pcl::io::loadPLYFile<pcl::PointXYZ>(msg, *cloud) == -1) {
return(-1);
}
return cloud->points.size();
}
int loadPCDFile(char* str, double* arr_X, double* arr_Y, double* arr_Z) {
//*打开点云文件
if (pcl::io::loadPLYFile<pcl::PointXYZ>(str, *cloud) == -1) {
return(-1);
}
/*pcl::visualization::CloudViewer viewer("Cloud Viewer");
viewer.showCloud(cloud);*/
for (size_t i = 0; i < cloud->points.size(); ++i) {
arr_X[i] = cloud->points[i].x;
arr_Y[i] = cloud->points[i].y;
arr_Z[i] = cloud->points[i].z;
}
return 0;
}
int PassThoughPCDFile(char* str, float* arr_X, float* arr_Y, float* arr_Z) {
//*打开点云文件
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
pcl::ExtractIndices<pcl::PointXYZ> extract;
pcl::io::loadPLYFile<pcl::PointXYZ>(str, *cloud);
//创建分割时所需要的模型系数对象,coefficients及存储内点的点索引集合对象inliers
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);
pcl::PointIndices::Ptr inliers(new pcl::PointIndices);
// 创建分割对象
pcl::SACSegmentation<pcl::PointXYZ> seg;
// 可选择配置,设置模型系数需要优化
seg.setOptimizeCoefficients(true);
// 必要的配置,设置分割的模型类型,所用的随机参数估计方法,距离阀值,输入点云
seg.setModelType(pcl::SACMODEL_PLANE); //设置模型类型
seg.setMethodType(pcl::SAC_RANSAC); //设置随机采样一致性方法类型
seg.setDistanceThreshold(40); //设定距离阀值,距离阀值决定了点被认为是局内点是必须满足的条件
//表示点到估计模型的距离最大值,
seg.setInputCloud(cloud);
//引发分割实现,存储分割结果到点几何inliers及存储平面模型的系数coefficients
seg.segment(*inliers, *coefficients);
extract.setInputCloud(cloud);
extract.setIndices(inliers);
extract.setNegative(false);
pcl::PointCloud< pcl::PointXYZ>::Ptr cloud_plane(new pcl::PointCloud<pcl::PointXYZ>());
extract.filter(*cloud_plane);
//pcl::visualization::CloudViewer viewer("Cloud Viewer");
//viewer.showCloud(cloud_plane);
//while (!viewer.wasStopped())
//{
// //you can also do cool processing here
// //FIXME: Note that this is running in a separate thread from viewerPsycho
// //and you should guard against race conditions yourself...
//}
for (size_t i = 0; i < cloud_plane->points.size(); ++i) {
arr_X[i] = cloud_plane->points[i].x;
arr_Y[i] = cloud_plane->points[i].y;
arr_Z[i] = cloud_plane->points[i].z;
// std::cout << " " << cloud->points[i].x << " " << cloud->points[i].y << " " << cloud->points[i].z << " " << std::endl;
}
return 0;
}
int Cloud_Visual(char* msg)
{
if (pcl::io::loadPLYFile<pcl::PointXYZ>(msg, *cloud) == -1) {
return(-1);
}
pcl::visualization::CloudViewer viewer("Cloud Viewer");
viewer.showCloud(cloud);
while (!viewer.wasStopped()) {
}
return 0;
}
源文件代码用到了resolution.h,头文件,新建resolution.h头文件,代码如下
#pragma once
#include <pcl/io/pcd_io.h>
#include <pcl/search/kdtree.h>
double computeCloudResolution(const pcl::PointCloud<pcl::PointXYZ>::ConstPtr& cloud)
{
double resolution = 0.0;
int numberOfPoints = 0;
int nres;
std::vector<int> indices(2);
std::vector<float> squaredDistances(2);
pcl::search::KdTree<pcl::PointXYZ> tree;
tree.setInputCloud(cloud);
for (size_t i = 0; i < cloud->size(); ++i)
{
if (!pcl_isfinite((*cloud)[i].x))
continue;
// Considering the second neighbor since the first is the point itself.
nres = tree.nearestKSearch(i, 2, indices, squaredDistances);
if (nres == 2)
{
resolution += sqrt(squaredDistances[1]);
++numberOfPoints;
}
}
if (numberOfPoints != 0)
resolution /= numberOfPoints;
return resolution;
}四、右击项目,点击生成即可生成c++的dll文件

















 714
714

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









