







Multi-period stochastic programming for relief delivery considering evolving transportation network and temporary facility
考虑交通网络和临时设施演化的多期救灾物资配送随机规划
这是北京交通大学刘老师的一篇论文
abstract
在本研究中,我们解决了一个关于灾后响应阶段基本物资分配的动态网络设计问题。我们提出了一个两阶段随机多期模型,在考虑不断变化的道路条件以及临时救援设施的关闭和迁移的情况下,最小化预期未满足的需求和与运营应急响应设施和分配救援物资相关的成本。为了解决大规模混合整数线性规划( MILP )固有的计算困难性,我们实现了一个加速的分支和Benders - cut算法,从而促进了高效的问题求解过程。我们通过大量的数值分析和在真实世界场景中的应用来验证该方法
1. Introduction
近年来,全球重大突发事件发生频率惊人上升,数以亿计的人急需人道主义援助( Kimani et al , 2021)。联合国人道主义事务协调办公室(人道协调厅, 2023)报告称,2022年人道主义需求达到历史新高,为517亿美元,较上年增长37 %。然而,尽管有这些紧迫的需求,但可用的资金只增加了20 %,令人震惊的275亿美元的请求没有得到满足。
……
(这篇文章比较长,尤其是前面的背景介绍部分我感觉……讲的挺多的在翻译前期我先跳过,如果后期有时间我会补上的~~!)
致力于提高HRL的有效性和效率
Facility location and allocation problems have been one of the most studied topics in the field of supply chain management (Saldanha-da Gama, 2022). It involves making several key decisions, including how many relief centers should be established, where these centers are located, which demand zones are served by each center, and how much demand can be satisfied. Facility location–allocation problems in humanitarian contexts and traditional supply chain management differ fundamentally in their objectives and constraints.
设施选址与分配问题一直是供应链管理(萨尔丹哈达·伽玛, 2022)领域研究最多的课题之一。它涉及到几个关键的决策,包括建立多少救援中心,这些中心位于何处,每个中心服务于哪些需求区域,以及能够满足多少需求。人道主义环境下的设施选址-分配问题与传统的供应链管理在目标和约束条件上有着本质的区别。
本研究的主要目标是解决灾害响应阶段的多期设施选址和救灾物资供应分配问题的建模和求解,考虑随机需求,不断发展的交通网络,以及临时设施的开放、迁移和关闭。
为了解决现有研究中的上述局限性,我们提出了一个基于多期场景的随机规划模型,以捕获灾后环境的动态和演变性质。我们的研究采用了Huang et al . ( 2015 )的方法,考虑了灾害发生后交通基础设施随时间的改善,并通过考虑需求不确定性和临时救助中心的动态位置扩展了他们的工作。为了解决所提出的大规模混合整数线性规划( MILP )的计算困难性,我们开发了定制的Benders分解( BD )算法,并使用了一些加速技术,包括背包不等式(knapsack inequality?)、多次切割、in - out稳定器和加强的BD分割。
the opening, relocation, and closure of temporary facilities
开启、搬迁、关闭的临时设施
我们首先通过建立特定约束来优化整数变量的个数,然后引入加速的Branch - and - Benders - cut算法来高效地求解大规模问题。这使得我们可以在不到12 min的时间内求解包含50个设施候选点、50个需求点、3个时间段和300个场景的随机规划实例。
本文的主要内容如下:第二部分对HRL的相关文献进行了综述。第3节阐述所提出的问题及其数学表述。在第4节中,我们基于理论性质推导出了所提方案的等价形式。第5节描述了BD算法的细节,包括经典的BD框架和几种算法加速策略。接下来,第6节给出了随机生成网络和真实案例的综合数值结果。最后,在第7节中,我们总结了我们的发现并勾勒了未来可能的研究方向。
2. Literature review
文献综述
在这一部分中,我们首先探讨了静态和动态两种建模方法。接下来,我们对灾前准备和灾后响应研究的现状进行综述。接着,我们讨论了两阶段随机规划方法,最后强调了现有的研究空白。
2.1. Static and dynamic modeling
.静态和动态建模
2.2. Pre-disaster preparedness and post-disaster response
灾前准备与灾后应对
灾害管理生命周期通常包括四个阶段:减缓、准备、响应和恢复
文献综述表格!
2.3. Two-stage stochastic programming
两阶段随机规划
其中,第一阶段决定设施的数量和位置,第二阶段决定物资的分配。一个包含一个目标函数的两阶段随机规划模型,将两个阶段的成本合并,有效地将战略和战术决策结合到一个框架中。然而,由于模型是在特定灾害情景发生前制定和求解的,因此所有决策本质上都是灾前规划的一部分。在灾后研究中,只有少数研究(例如, Hu et al . , 2019)采用了两阶段或多阶段随机规划方法。大多数研究假设每个时间段的需求在灾难发生后立即是完全已知的,这在真实世界的情况下是很少的
2.4. Research gap
研究空白
3. Problem statement and formulation
问题的陈述与表述
我们考虑一个由T个时间段( t∈= { 1,2 , ... , T }),J个临时救助中心候选地点( j∈= { 1,2 , ... , J })和I个受灾地区( i∈= { 1,2 , ... , I })组成的多时段双层网络。临时救灾中心是用于储存和包装必要的救灾物资,如药品、食品、水、检测包等。我们使用容量限制,hjt,来计算每个候选位置在每个时间段内的有限供应。每个区域的需求可以通过多个设施来满足。我们通过S种灾害情景来刻画系统的不确定性,相应的概率问题被定义为外生参数。
在灾害期间,交通网络容易受到干扰。因此,设施只能在未被破坏的节点上建设,而使未连接的受影响区域得不到服务。随着恢复工作的进行,一些中断的节点和连接(边)被恢复,这可能会导致新的临时救济中心的开放,并将救济物资运送到以前无法进入的地区。图中的灰色圆和黑色圆分别代表被打乱和可操作的节点。当设施建立时,用三角形表示。新设施的开放仅限于可进入的候选地点,被打乱的区域不能被服务。关于(即,道路),箭头表示救灾物资的运输路线,箭头的粗细表示运送物资的数量。图1提供了不同时期演化网络的可视化表示,展示了从具有显著交通网络中断的初始状态到连通性增加的时期的进展。具体来说,在初始时间段( t = 1)内,四个节点完全断开;然而,在随后的两个时期,情况有所改善,分别以两个和零中断节点为特征。
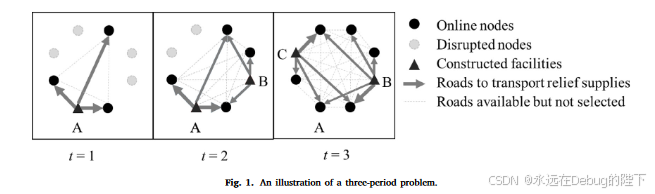
我们假设操作节点组成一个完整的网络,当一个节点被破坏时,与该节点相连的道路也是不可用的。考虑到现实中的交通网络是相对稀疏的,我们可以通过给两个不连通节点之间的距离赋予一个较大的数值来放松完整网络的假设。选址决策包括关闭现有设施(例如,节点A被选为位于第一周期但在t = 3时关闭的设施)和打开新设施(例如,在t = 2时,在节点B新建一个设施)。此外,针对随机需求的实现,对救灾物资的出货量进行了重新优化
我们采用类似的方法,通过目标函数的最后一项对未满足的需求进行严格惩罚。此外,由于运输成本与临时救助中心和需求点之间的旅行距离成正比,因此最小化这些成本可以鼓励模型在可能的情况下提高运输效率。
假设:
1 .临时救助中心可以关闭或搬迁,但需支付额外费用。
2 .需求是不确定的,而道路条件是已知的,它们是不断发展的。
3 .临时救援中心的安装时间是最小的,因此被认为可以忽略不计。
4 .运营节点取自完整网络,无法在中断或无法通行的节点上建立临时救助中心。
5 .灾前没有预先建立的临时救灾中心;即Xj0 = 0,∑J∈. 6 .规划视域是已知的、有限的。
符号说明:
表格……
节点与边的中断状态:路不通,因灾害
在上述五组决策变量中,第一阶段进行选址相关决策( zjt , xjt和pjt),第二阶段针对不同情景进行分配优化决策( ysijt和ρ s)。我们解决灾难发生后的救援物资分配问题,如医疗包、食物、水、帐篷和衣物,而不是立即进行生死救援决策。我们使用连续变量来量化未满足的救灾物资需求和救灾物资派遣数量。在以离散单位衡量救灾物资的情况下,两个决策变量都可以四舍五入到它们最近的整数。
迁移的概念……
费用的解释……
模型的建立:
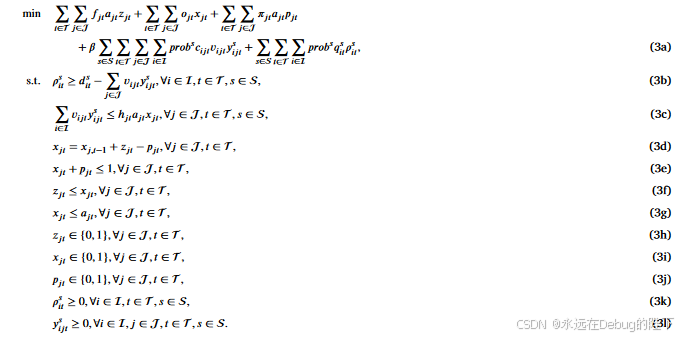
目标函数( 3a )旨在最小化总期望成本和未满足需求,包括临时设施的第一阶段开放、运营和关闭成本,以及第二阶段运输和未满足需求惩罚成本。值得注意的是,当乘以随机状态变量a和v时,不可达的设施和道路将不会产生任何成本。约束( 3b )定义了未满足需求的数量。约束( 3c )保证配送物资的总数量不超过每个设施的最大容量。约束( 3d )类似于经典批量生产问题(沃尔西, 1998)的库存守恒等式,其中设施j在t期( xjt )的当前状态与其在t - 1期( xt-1 )和开( zj )的状态有关约束( 3e )来源于xjt和pjt的实际定义,表示某设施j在同一时期内不能同时生存和关闭。约束( 3f )意味着如果一个新的设施的状态是开放的,那么我们就不能建立这个设施。约束( 3g )表明我们不能在一个不可用的节点上建立一个设施。最后,约束( 3h ),( 3i )和( 3j )是标准的二元约束,( 3k )和( 3l )是非负约束.值得注意的是,在临时设施的设置和关闭成本显著低于运营成本的情况下,或在重新开放设施所减少的运输和未满足需求的惩罚成本所产生的节省抵消了关闭和重新开放的额外支出我们将这种灵活性纳入我们的模型,以考虑在现有的、设备齐全的设施中建立临时救济中心的情况,而这需要最低限度的适应。然而,当开放设施的运营成本远低于设置和关闭成本时,这种关闭和重新开放的循环不太可能发生;也就是说,当ojt远小于f和ojt远小于π jt时.
4. Reformulation
重述
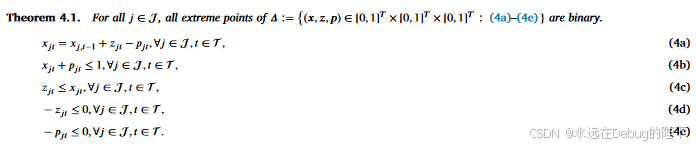
由于整数变量的滥用会增加计算的困难性,我们利用一个有利的性质来减少二进制变量的数量,即约束子集的参数矩阵是全单位模的( TU )。首先,我们回顾附录A中与TU相关的基本原理。命题A.1指出,只要右端值为整数,TU矩阵具有定义整数顶点多面体的良好性质,引理A.2给出了TU矩阵的一个充分条件。最后,我们在定理4.1中证明了仅与x,z和p有关的约束构成凸包.
由约束条件( 3d )和( 3e )可知,x、z和p的上界均为1。因此,连续松弛约束( 3d ) - ( 3j )等价于下面的( 4a ) - ( 4e ) .
定理4.1
证明:
分析:
幸运的是,根据定理4.1,如果对x,z,p至少存在一个二元约束,我们的完整性仍然成立。不失一般性,加入约束( 3i )。
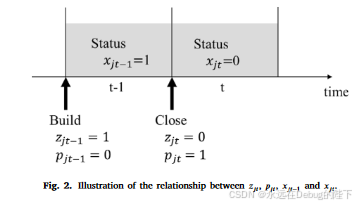
在我们的多周期模型中,变量zjt和pjt分别表示打开或关闭设施的决策,而变量xjt表示设施的当前状态。任一给定时期的状态由该时期开始时发起的( zjt或pjt)行动以及该设施在前一时期( xjt-1 )的状态决定。关于这一概念的说明,参见图2;它描述了一个场景,其中一个设施在周期t - 1的开始建造,然后在周期t的开始关闭。
因此,本文将重新表述的两阶段随机多周期设施选址问题( SMFLP )总结如下

5. Solution approach
5 .解决途径
作为MILP,SMFLP的规模随着I,J,T和S的扩展呈指数增长,这在计算上具有挑战性。然而,决策可以分为第一阶段的位置变量zjt,xjt和pjt以及第二阶段的连续分布变量ys ijt和ρ s it。这种分离促使我们使用BD (本德尔斯, 1962),一种公认的分解算法,已被证明在MILP中是有效的。BD算法将原MILP分解为一个松弛的主问题( MP )和一个子问题( SP ),并在有限的迭代次数内获得最优解。MP包含了关于SP的所有整数变量和一些连续的辅助变量,并给出了一个下界。SP是一个纯粹的线性规划( LP ),它为M提供了有效的不等式
5.1. BD framework of SMFLP
SMFLP的BD框架
5.1.1. BD sub-problem and its dual
BD子问题及其对偶
给定固定的二元变量ytxjt,连续变量ijt和ρ s可以通过求解简化的LP得到,从而在每个场景下优化已知位置的分配策略。因此,生成S个子问题SP (∂s∈)如下:
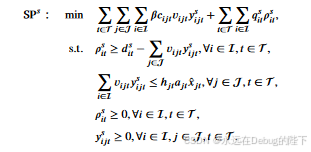
设uit和wjt是与约束( 6b )和( 6c )相联系的对偶变量;SPs ( DSPs ,∑s∈)的对偶问题建立如下。
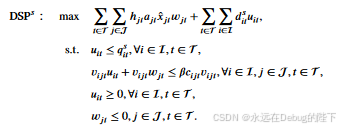
设As是由Eqs指定的DSPs多面体的极值点的集合。( 7b ) - C ( 7e ),并对每个极值点α∈As定义关联变量u α it,wαjt和目标值θ α s .那么,DSPs的最优目标值( θ⋅s )可由![]()
5.1.2. BD master problem
BD主问题
基于DSPs的公式及其多面体的极值点,SMFLP可以重新制定如下。
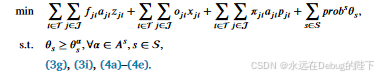
由于极值点集合As和灾后需求情景集合规模较大,约束( 8b )的数量难以置信地庞大,使得原问题无法求解。因此,我们考虑一个基于DSPs最优解的约束( 8b )子集,令s∈,得到一个松弛的SMFLP,记为MP。
5.1.3. Procedure of BD
BD程序
BD算法的实现过程如下。在第m次迭代中,首先求解固定整数变量ξ xm、ξ zm和ξ pm的DSPs,∂s∈,得到其最优解( "它的" , "它的"),并生成有效割
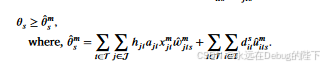
然后,关于可行解的一个上界( UB )
![]()
然后,将式( 9 )对MP进行截断,并利用其最优目标得到下界( LB )。用MP的最优解更新χ m + 1、χ m + 1、χ pm + 1。值得注意的是,我们定义UB和LB的相对差异为
![]()
如果差距小于给定的收敛准则ε,则终止当前迭代,达到最优性。
5.2. Approaches to accelerate BD
加速BD的方法
过多的迭代次数会使大规模MILP的收敛速度变慢,极大地影响了算法的性能。为了克服这一困难,本文采取了一系列措施来加速BD。
在传统的BD过程中,需要迭代求解MP和DSP;然而,每一轮MILP的求解都会浪费大量的时间。为了避免重复,Botton等( 2013 )、Ü ster和Dalal ( 2017 )、菲谢蒂等( 2017 )和Dalal和Ü ster ( 2018 )利用CPLEX的惰性约束回调特性,在整个过程中只求解一个MP实例,与传统的迭代方法相比,在计算效率上有了显著的提高。我们采用类似的branchand - Benders - cut框架,使用Gurobi (可用9.0 . 0或以后版本)的高级回调函数。Gurobi回调是由优化器周期性地调用的用户函数,允许用户监视或修改分支-切割树的状态和行为。在求解大规模MILP时,只要算法找到一个可行的在位者,就会调用惰性约束回调。通过只包含沿着分支-切割树找到的解实际违反的约束,可以通过只添加所有有效约束的子集来找到一个已证明的最优解。具体来说,我们可以通过调用cbGetSolution来查询当前节点的解,然后调用cblazy来添加切断解的懒惰约束。Gurobi保证了任何不可行解都可以被切断;如此,树搜索继续进行,直到MP收敛。
MILP的时间复杂度随决策变量个数呈指数增长。为了克服这个困难,麦克丹尼尔和Devine ( 1977 )在BD的前几次迭代中将整数变量松弛为连续变量,通过求解松弛后的线性规划( LP )来提高BD的速度。我们采用类似的方法,将整个Benders框架分为两个阶段:首先,将整数变量松弛为它们的连续对应物,并通过添加BD割来收敛求解最终的LP;然后,恢复整数变量并在Gurobi回调的基础上添加懒惰约束,以达到最优解。
MILP的时间复杂度随决策变量个数呈指数增长。为了克服这个困难,麦克丹尼尔和Devine ( 1977 )在BD的前几次迭代中将整数变量松弛为连续变量,通过求解松弛后的线性规划( LP )来提高BD的速度。我们采用类似的方法,将整个Benders框架分为两个阶段:首先,将整数变量松弛为它们的连续对应物,并通过添加BD割来收敛求解最终的LP;然后,恢复整数变量并在Gurobi回调的基础上添加懒惰约束,以达到最优解。
遵循分支与Benders - cut框架,我们进一步从5.2 . 1节的根节点和5.2 . 2节的有效割两方面对算法进行加速。
5.2.1. Linear relaxation and in-out stabilizer of the root note
线性松弛和内-外稳定器
第一阶段解决与根节点相关的分支-切割树搜索过程,在根节点处添加割的目的是排除一个较大的可行区域,而不是用原始MILP找到整数顶点。菲谢蒂等人( 2017 )报道了整个切割环的收敛性严重依赖于用于生成新切割点的策略,并提出了一个简单的in - out变体来稳定根节点处的切割平面。
我们的论文遵循SMFLP模型的类似的输入输出稳定器。令( xr jt , zr jt , pr jt)为松弛LP在根节点处的在位最优决策变量.不失一般性,我们用变量x来说明这一过程。在每次迭代中,通过以下步骤选择一个新的稳定节点" xjt ",而不是直接将xr jt插入到双程序DSP中。首先,引入一个初始值为( 1 , ... , 1)的稳定点" xjt ";在得到当前最优xrjt后,将稳定器" xjt "向最优解xrjt中途移动" xjt = ( ' xjt + xrjt)∕2 ",得到中间点" xjt = λxrjt + ( 1-λ) " xjt + δ( 1 , ... , 1) "来调用BD分离器。然后,将 ̄xjt代入DSPs中,得到它的最优解( u,w).
考虑到原始节点更靠近稳定子" xjt ",我们初始设置参数λ∈( 0,1 ] ~ 0 . 2和δ≥0 ~ 2ε ( ε = 10 ~ 5 ) )。此外,如果上界在连续5次迭代中没有衰减,则重置λ = 1;如果在接下来的5个循环内仍然没有改善,则重置δ = 0,终止根注循环。为提高求解速度,在5次迭代后删除松弛变量为正的约束。
5.2.2. Valid cuts
有效切割
背包不等式
在每次迭代中,我们可以得到当前的最佳上界,记为UB,用现值wjt和ujt作为导出的最优性切割。因为我们可以得到一个关于UB、w和u
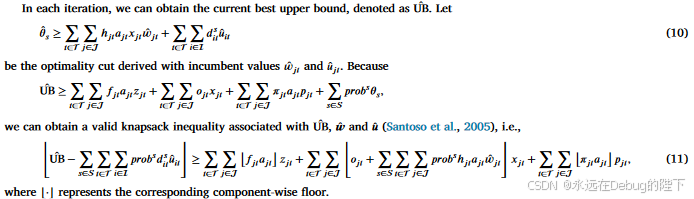
Strengthened Benders cuts.
加强本德尔削减。
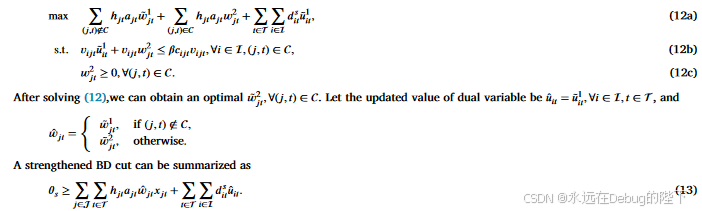
由于DSPs可能是高度退化的,我们可能会找到许多最优解;因此,检测出一个更好的选择最优变量的方案是非常重要的。一般而言,位置决策是稀疏的;因此,对偶变量wjt很可能具有零系数,其中任何可行解都可能导致相同的目标值( Bodur et al , 2017)。因此,直接从DSPs得到的BD cuts可能是弱的。给定χ jt,令为封闭设施集合,即= { ( j , t)∶χjt = 0 }。由于约束( 6c )包含封闭设施,然而,选择其他最优的wjt值将增加右边值∑t∈∑j∈hjtajtxjtwjt,并加强原始的BD切割。
因此,我们采用两阶段方法,在固定Δ ρ xjt的情况下,使BD切割变得更强。首先,求解原始DSPs,得到相应的最优解' w1jt和' u1it。其次,引入一个辅助决策变量w2jt,( ? ) ( j , t)∈,并求解下面的线性规划
Multiple cuts generation.
多重切割的产生
根据经典的BD框架(本德尔斯, 1962),单次迭代中BD割的数量与场景数S保持一致,每个割通过MP中的一个辅助决策变量θ s来体现。然而,大量增加的切割会沿切割环急剧增加计算负担。因此,菲谢蒂等( 2017 )提出了一个连续变量θ sum来代替θ s,∂s∈,其中θ sum =∑s∈probsθs,从而在单次迭代中只产生一个对MP的新割。Gong和Zhang ( 2022 )将所有场景分为三组,并在同一组中聚合一个割,从而在一次迭代中生成MP的三个有效割。
受上述割生成方案的启发,我们通过增加不同数量的聚合割对现有文献进行了改进。为此,引入了一个新的参数τ∈{ 1,2,..,S },表示添加的割的个数.令Θ 1,Θ2,..,为关于某个子集k⋅,k∈{ 1,2,..,τ }的相应决策变量,其中τ个子集互不相交,它们的并集为。令prob Θ k =∑s∈kpros;那么,Θ k与θ s的关系可以概括为∑τk = 1pro ΘkΘk =∑s∈pros θ s。利用上述定义,在每次迭代过程中为MP生成τ个新的割,加速后的MP可以写成如下形式:

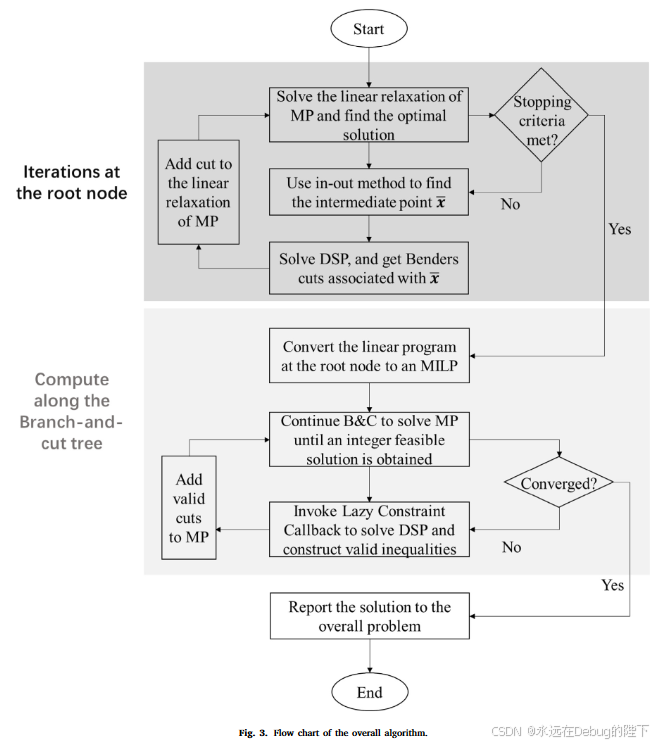
5.3. The overall algorithm
图3描述了我们用回调实现的具体的加速Benders分解( ABD )算法。第5.1节总结了BD的一般框架。具体地,在5.1 . 1节和5.1 . 2节中分别总结了主问题和对偶子问题的提法,它们在整体求解方法中起着重要的作用。我们首先在根节点处求解主程序的线性松弛,并采用in - out稳定子来寻找松弛后程序的最优解;关于迭代和停止准则的更多细节,请参见5.2 . 1节。然后,我们得到一个在中间点处有若干个Benders割的线性规划,记为~ x。然后,根节点线性规划中的连续决策变量收敛到二进制变量,并沿着分支切割( Branch-and-Cut,B & C )树继续计算,直到找到整数可行解。一旦发现,我们检查上界和下界是否收敛。如果不是,根据第5.2 . 2节,我们使用惰性约束回调来求解对偶子问题并构造有效的不等式.将得到的有效切割添加到主程序中,并继续该过程,直到得到最优解。
6. Numerical results
数值结果
证明了生成和加速分解的性能,并进行灵敏度分析,针对不同模型进行比较,并针对实例进行分析
6.1. Performance analysis
表现分析
比较了ABD和Gurobi
进行参数设置并介绍详细情况
表2包括20组实例,每组进行了5次随机实验。我们定义" Ratio "为Gurobi的计算时间除以ABD的计算时间。"平均值"、"最大值"和"最小值"分别代表平均值、最高和最低比率,计算时间以秒计。除了"最小值"一栏中提到的4种情况外,所提出的ABD总体上优于Gurobi
如图3所示,我们在根节点处使用in - out稳定子,并计算松弛LP的最优目标,记为OBJLP。表2中的' ' Root gap ' '列表示OBJLP与最优解OBJ *的偏差,定义为1 - OBJLP / OBJ *,在根节点处表现出较高的收敛速度,达到了距离最优解仅1 % ~ 4 %的下界。此外,与更大的一组场景相比,当合并较小数量的切割时,可以实现计算时间的显著减少;例如,当参数设置为I = 15,J = 15,T = 3,S = 300时,Gurobi的计算时间是ABD的15.6倍( 100个切割),但当增加300个切割时,Gurobi的计算时间减少到ABD的9.9倍。表3进一步描述了u的影响。具体来说,对于I = 50,J = 50,T = 3,S = 300的较大网络,我们提出的BD在平均12分钟内达到最优解,大约是Gurobi的3.9倍。
6.2. Sensitivity analysis
敏感性分析
在这一部分中,我们考虑了与容量、开启成本和关闭成本相关的敏感性分析。所有的实验都是在一个包含20个受灾区域和20个候选设施的网络上进行的,共5个时段,400个场景,其他参数的取值与6.1节相同。对于每个算例,我们报告t∈{ 1,3,5 }时期的总成本、安装成本和运营成本。设置成本后的括号中的整数值表示t时刻新建设施的总数(∑j∈zjt),在线设施的总数(∑j∈xjt)列于运行成本后的括号中。
如图。4到9,我们描绘了低参数水平和高参数水平进行比较。本小节中的所有图形都保持了一致的象征意义:黑色和灰色圆圈分别代表可达和中断的需求点;深灰色和浅灰色圆点分别表示可达和被破坏的设施候选位置;一个开放的设施用一个三角形来表示;分布的路线用线标出
6.2.1. Sensitivity analysis of capacity ( h)
容量( h )的敏感性分析
如表4所示,随着h的增加,总成本和列出的成本构成均呈下降趋势,且倾向于建设数量较少、容量较大的设施。这一结果与数学模型一致,因为扩容实际上扩大了SMFLP的可行域。另一个有趣的现象是,当h为较小的(令h = 50和55)时,总成本显著下降,而当h为较大的(例如, h = 90和95)时,总成本下降不明显。
6.2.2. Sensitivity analysis of setup (opening) cost ( f )
6.2 . 2。安装(开启)成本( f )的敏感性分析
……灵敏度分析部分感觉么有什么很奇特的地方……所以我是打算跳过的
6.3. Cost-and-benefit analysis of the stochastic model
6.3 .随机模型的成本效益分析
在这一部分中,我们通过使用与6.1节相同的输入参数,将随机模型与其确定性模型进行比较,从而对随机模型进行成本效益分析。随机性的成本通过与确定性模型相比增加的名义成本来描述,其效益通过随机生成的样本外场景下节省的成本来说明。为此,我们首先通过将随机场景固定在其期望值,推导出SMFLP的确定性多期设施选址问题( DMFLP )形式。然后,求解SMFLP和DMFLP得到相应的名义成本NCS和NCD,并分别得到选址决策( xS , zS , pS)和( xD , zD , pD)。接下来,我们评估其他样本外情景下的模型性能,通过求解附录B中的问题( B.2 ),得到固定位置决策( " x "、" z "、" p ")和一定随机情景Δ ds下的总成本( TC )。最后,我们通过蒙特卡洛模拟评估SMFLP和DMFLP的样本外性能,具体如下:
Step1:随机生成均匀分布
Step2:定义模型SMFLP和DMFLP的样本外表现为TCS和TCD。
Step3:重复1,2 five times
我们将随机模型(在倒数第二列中报道)的成本定义为DMFLP和SMFLP的名义成本之差,即( NCS-NCD) / NCD,而随机性的好处则表现为样本外表现(在最后一栏中报道)的差异,即( E [ TCD ] - E [ TCS ]) / E [ TCS ]。从表7中,我们做了如下观察。
……一些分析……
6.4. Case study
案例研究
我们在Liu et al ( 2023 )的基础上考虑了中国北京的疫情威胁下的案例研究。
北京市整体网络由66个设施候选点和333个影响区域组成。设施候选地一般可分为四类( 3A医院、地区医院、地区疾控中心、商业检测点),受影响区域以位于16个独立区的行政城镇为代表。报告节点的经纬度从高德web API中收集,节点i和j之间的移动距离cij由它们的坐标导出。
设φ ( " Dk t , Pi)是一个单射函数,它映射了一个地区k在周期t到一个人口为Pi的城镇的确诊病例数" Dkt " .具体来说,我们首先获得每个城镇i的人口数量( (资料来源于中国知网( CNKI )第五次全国人口普查) ),然后使用"轮盘赌政策"将" Dkt "分配给城镇i,即人口数量越多的城镇越可能有更多的确诊病例(需求)。一个实例的场景数量为50个。从设施候选地(供应方)和受灾地区(需求方)两个角度的参数总结如下。
7. Conclusions
In this paper, we present a two-stage multi-period stochastic programming model designed for optimizing post-disaster response management.
……大概翻译一下……
所提出的模型旨在最小化未满足的需求和由设施开放、运营和关闭成本以及运输成本组成的总物流成本,同时考虑了灾害响应阶段的需求不确定性和不断变化的运输网络。
我们的工作从理论和实践的多个角度为人道主义救援物流领域做出了贡献。首先,研究结果表明,在改善道路条件的基础上动态调整运营设施的数量和位置,可以在提高成本效率的同时减少救灾物资配送过程中的未满足需求。在灾害发生后的最初阶段,由于交通网络的中断和一些受灾地区的交通不便,较少数量的临时救助中心往往是足够的。
虽然我们的工作为灾后救援行动提供了一些贡献,但也提出了未来研究可能解决的局限性。例如,为了有效地使用我们提出的模型和解决方法来管理灾后救援交付,建立准确的灾后需求场景是必不可少的。尽管我们在目标函数中考虑了未被满足的需求惩罚成本,但其他方面,如公平和减轻人类痛苦等问题尚未得到解决。我们还假设道路条件虽然在不断变化,但却是已知的,这可能会导致在道路条件不清楚时的次优决策。最后,暂不考虑向临时救助中心运送前置库存的入境物流。


















 1593
1593

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











