







1.创建基础几何体模型
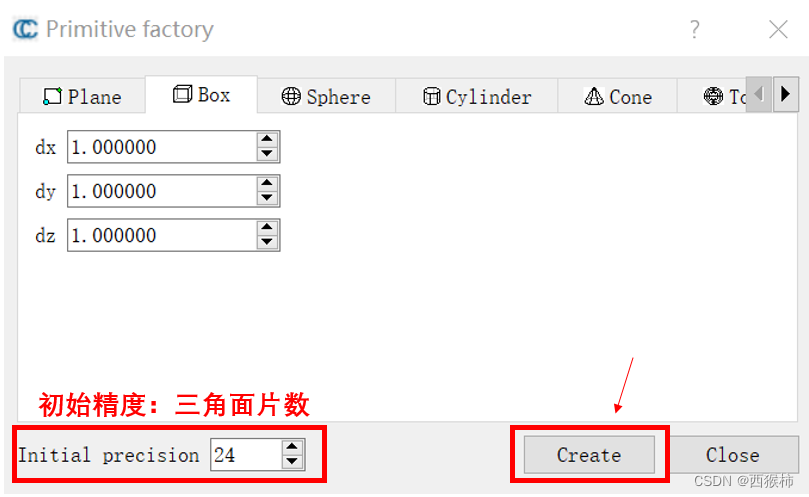
打开CC,操作步骤如下:
File-->Primitive factory-->设置参数-->Create
生成的模型如下图:

2.对模型采样
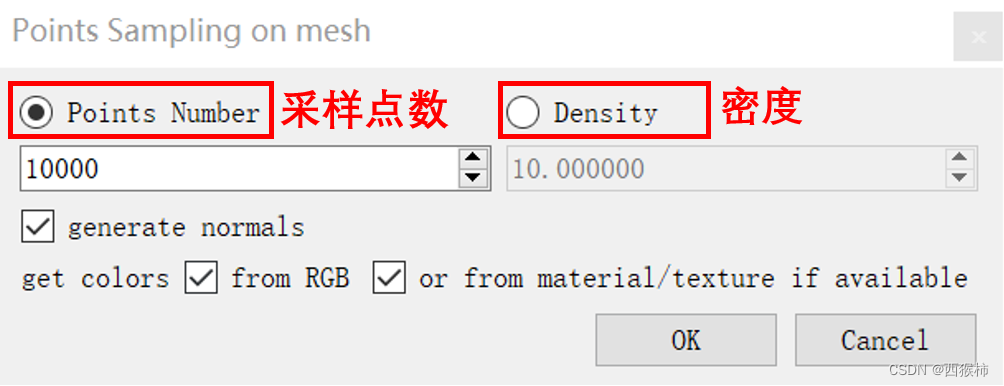
从mesh模型采样点云步骤:Edit-->Mesh-->Sample points-->设置参数
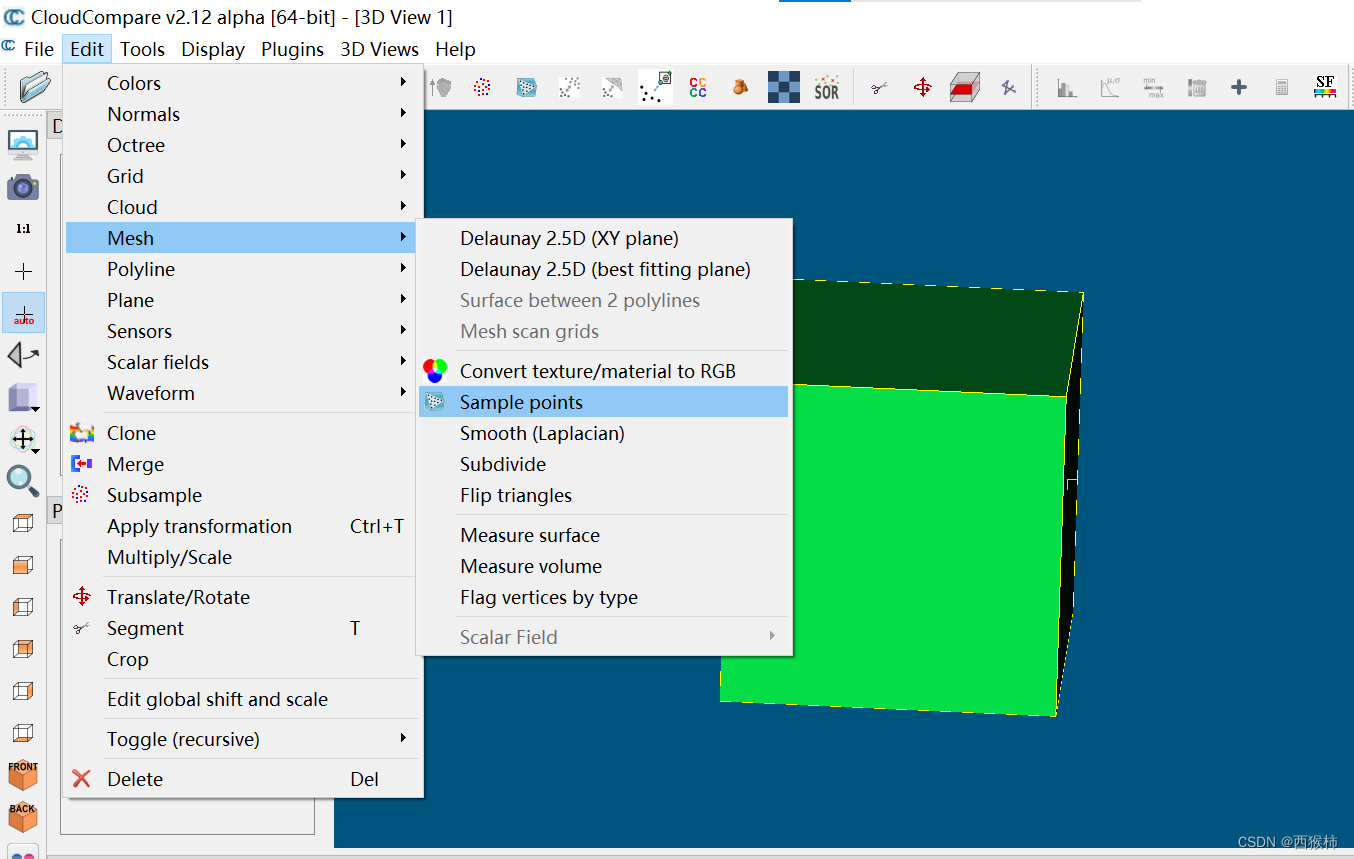
参数包含采样个数、密度、法向量信息等
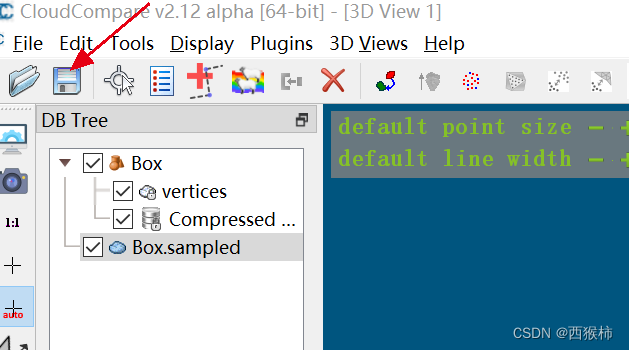
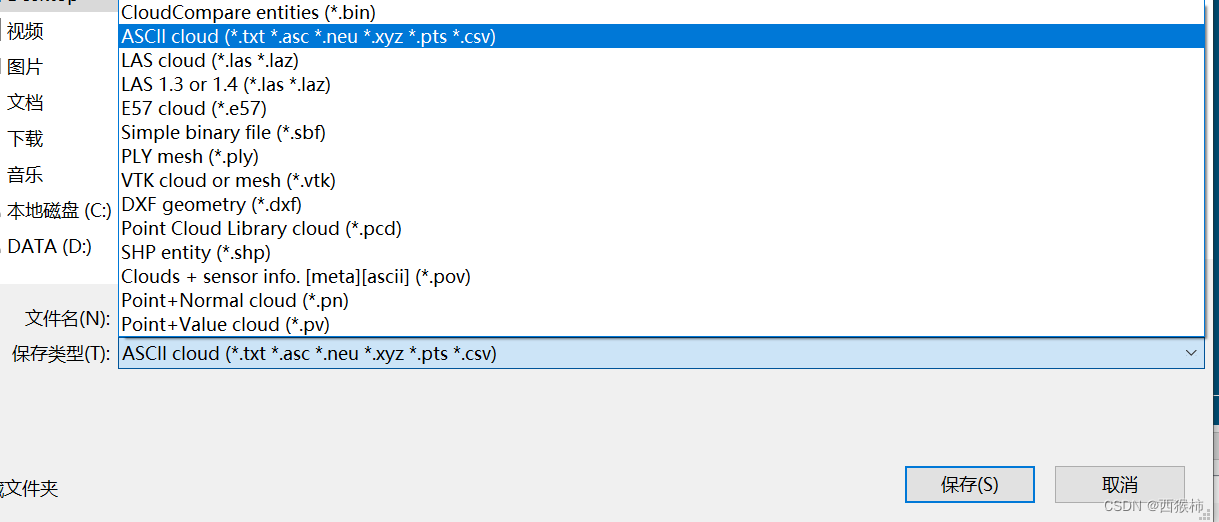
3.保存点云
在DB Tree中点击要保存的点云文件,点击保存,选择格式进行保存。
打开CC,操作步骤如下:
File-->Primitive factory-->设置参数-->Create
生成的模型如下图:
从mesh模型采样点云步骤:Edit-->Mesh-->Sample points-->设置参数
参数包含采样个数、密度、法向量信息等
在DB Tree中点击要保存的点云文件,点击保存,选择格式进行保存。
 129
129

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



























