







前言:
机器人本体和机器人的工作环境中往往存在大量的组件元素,在机器人设计和应用中会涉及不同组件的位置和姿态,这就需要引入坐标系和坐标变换的概念。
一、机器人中空间描述和变换:
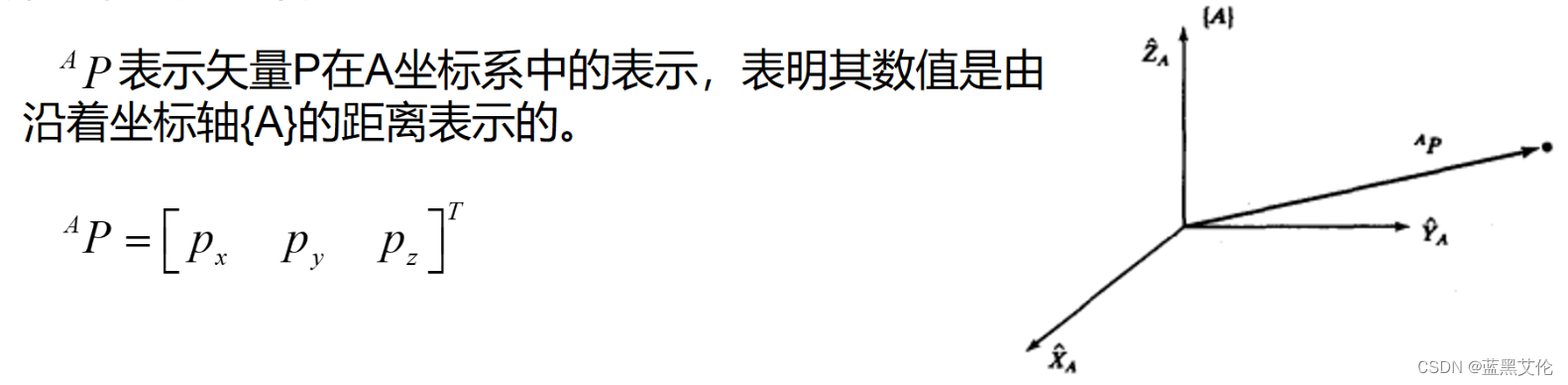
1.位置描述:
一旦建立了坐标系,就可以用一个3*1的位置矢量对世界坐标系中的任何点进行定位。由于世界坐标系中通常还要定义许多坐标系,需在位置矢量上附加说明是在哪一个坐标系中定义的。
2.姿态描述:
位置描述只能表示空间的点,但对于末端执行器还需要描述其空间的姿态。

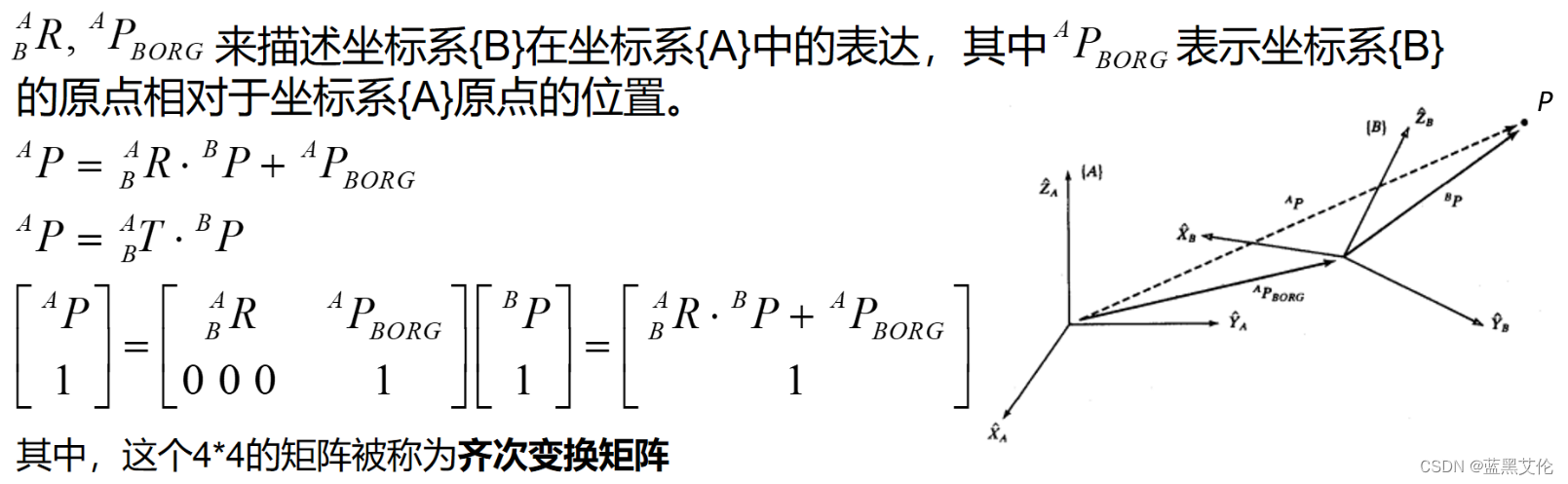
3.坐标系的变换:
二、TF功能包:
1.TF功能包的功能:
TF是一个能让用户随时间跟踪多个坐标系的功能包。它使用树形数据结构,根据时间缓冲并维护多个坐标系之间的坐标变换关系,可以帮助开发者在任意时间、坐标系间完成点、向量等坐标的变换。
TF可以请求如下类型的数据:
(1)5秒之前机器人头部坐标系相对于全局坐标系的关系;
(2)机器人夹取的物体相对于机器人中心坐标系的位置;
(3)机器人中心坐标系相对于全局坐标系的位置。
使用TF功能包需要以下两个步骤:
(1)监听TF变换:
接收并缓存系统中发布的所有坐标变换数据,并从中查询作需要的坐标变换关系。
(2)广播TF变换:
向系统中广播坐标系之间的坐标变换关系。
2.TF功能包安装:
sudo apt-get install ros-noetic-turtle-tf
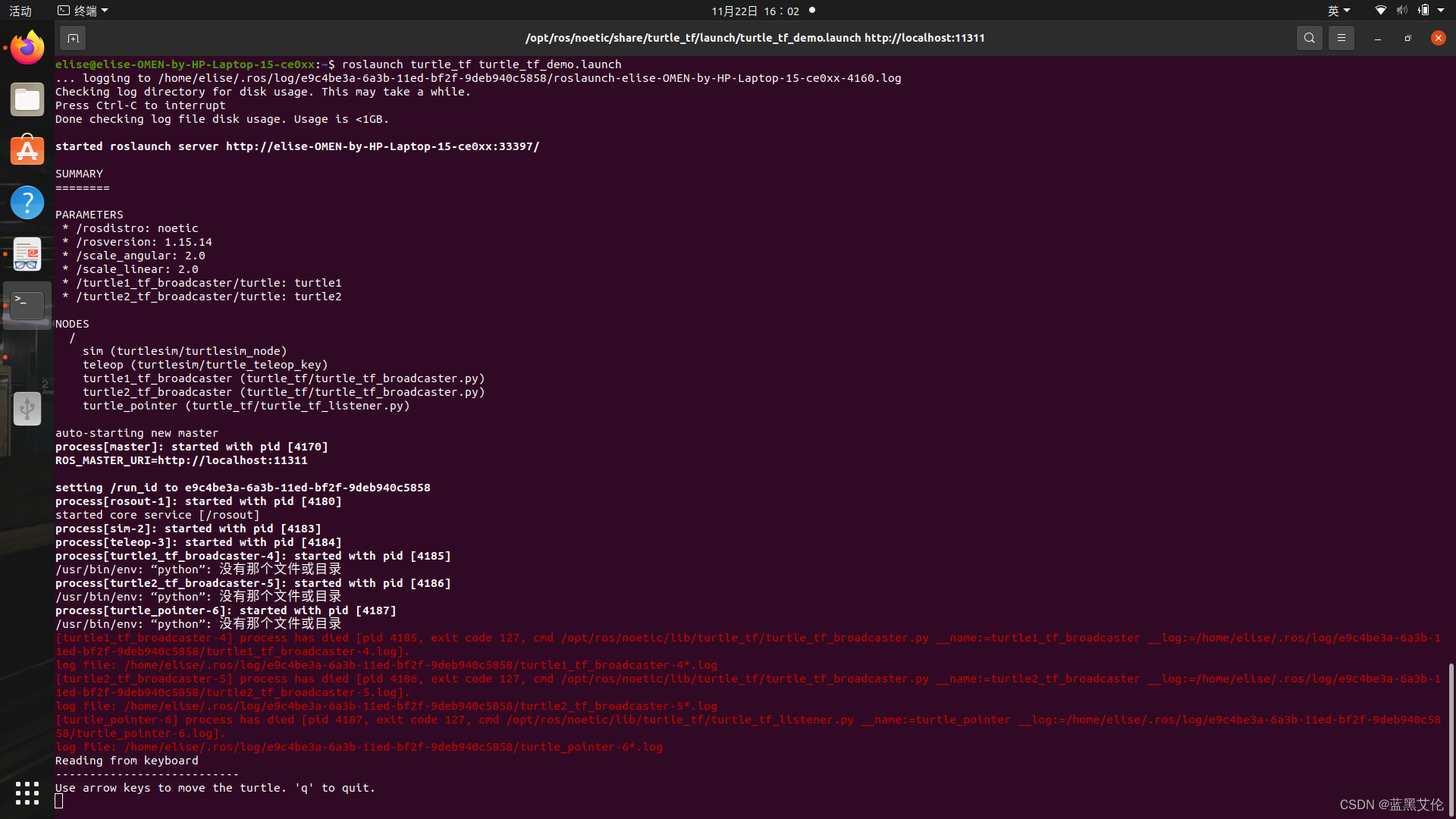
roslaunch turtle_tf turtle_tf_demo.launch
rosrun turtlesim turtle_teleop_keyPS:如果roslaunch turtle_tf turtle_tf_demo.launch报错,运行以下命令:
sudo apt install python-is-python3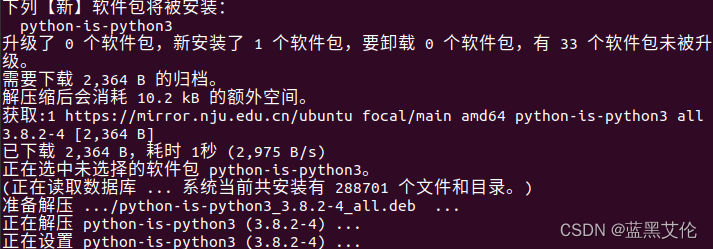
3.乌龟例程中的TF:
(1)功能:
键盘控制乌龟1的运动,同时乌龟2会规划最短路径跟随乌龟1。该程序用于检验TF安装是否成功,同时是后续学习TF的广播和监听功能的载体。
(2)TF功能包安装和排错过程:

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4077
4077











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









