







 本文是ROS学习笔记的第13篇,主要介绍了rviz——一款强大的三维可视化工具。rviz能用于描述并展示机器人的各项属性,如尺寸、位置等,还能实时显示传感器数据和环境变化。文章详细讲解了rviz的数据类型、界面操作,并通过实践步骤指导如何将基本形状发送至rviz进行可视化。
本文是ROS学习笔记的第13篇,主要介绍了rviz——一款强大的三维可视化工具。rviz能用于描述并展示机器人的各项属性,如尺寸、位置等,还能实时显示传感器数据和环境变化。文章详细讲解了rviz的数据类型、界面操作,并通过实践步骤指导如何将基本形状发送至rviz进行可视化。
前言:
rviz是一款三维可视化工具,很好地兼容了各种基于ROS软件框架的机器人平台。
(1)rviz可以用XML对机器人、周围物体等任何实物进行尺寸、质量、位置、材质、关节等属性的描述,并且再界面中呈现出来。
(2)rviz还可以通过图形化方式,实时显示机器人传感器的信息、机器人的运动状态、周围环境的变化等。
(3)rviz通过机器人模型参数、机器人发布的传感器信息等数据,为用户进行所有可检测信息的图形化显示。
1.rviz数据类型介绍:

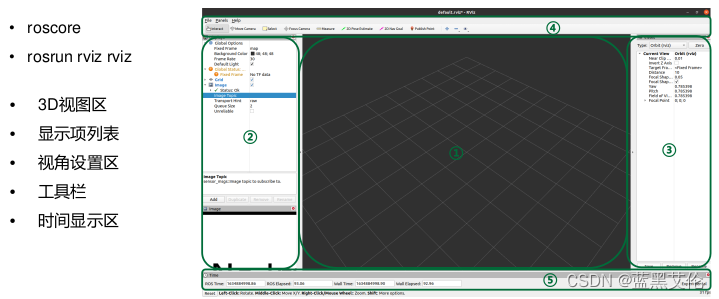
2. rviz界面介绍:
3. 实践操作:
目的:发送基本形状至rviz
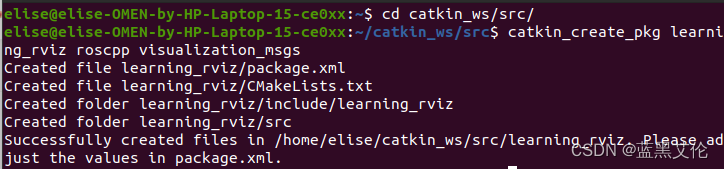
(1)创建功能包:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 16万+
16万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









